Mike Rigsby
Mike Rigsby-
Assembly
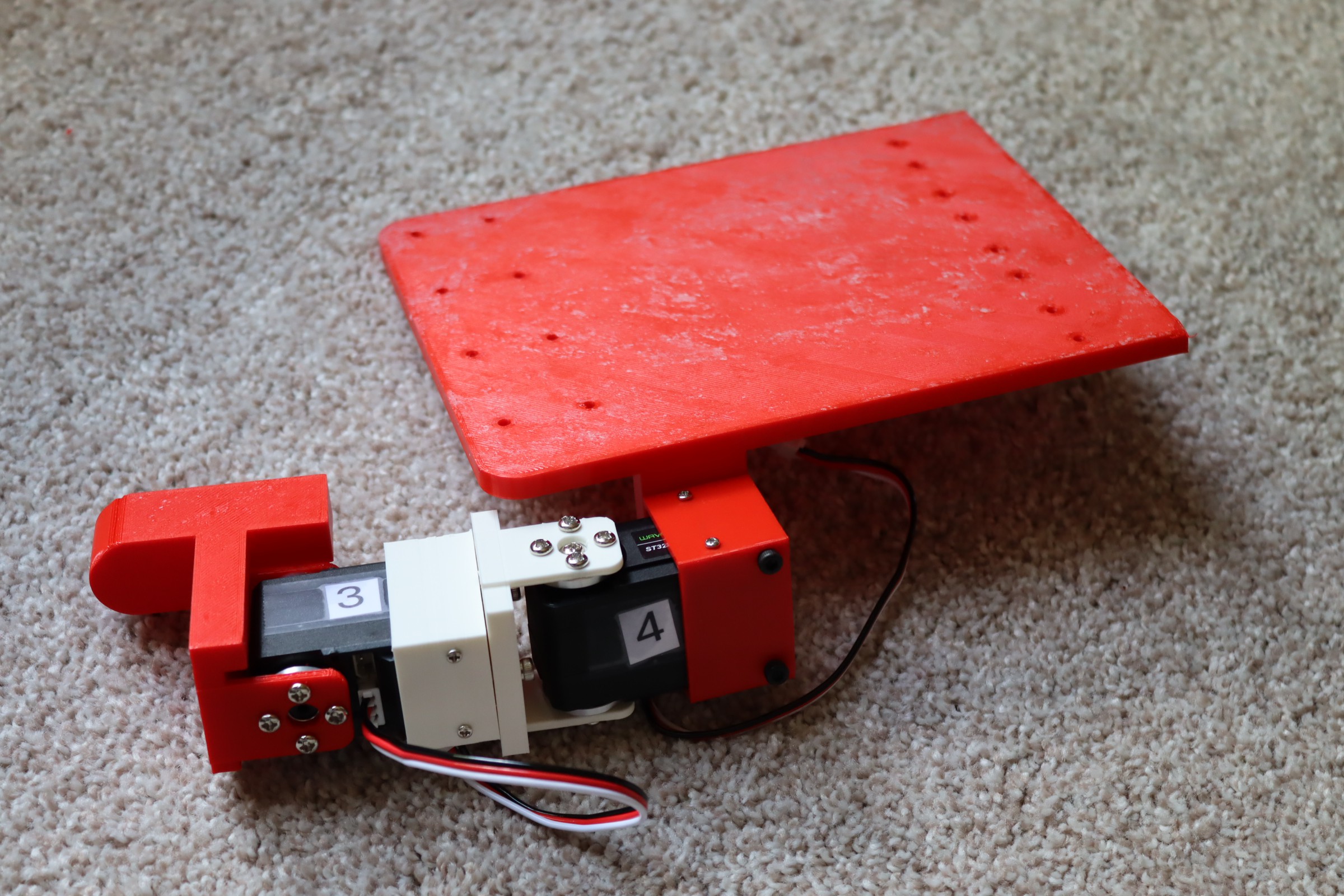
04/16/2025 at 23:42 • 0 comments- Setup the Servo Motors:
- Use 3D printed parts and six serial servo motors.
- Refer to the three-finger hand for the humanoid robot project on Hackaday for information on setting up the servo motors.
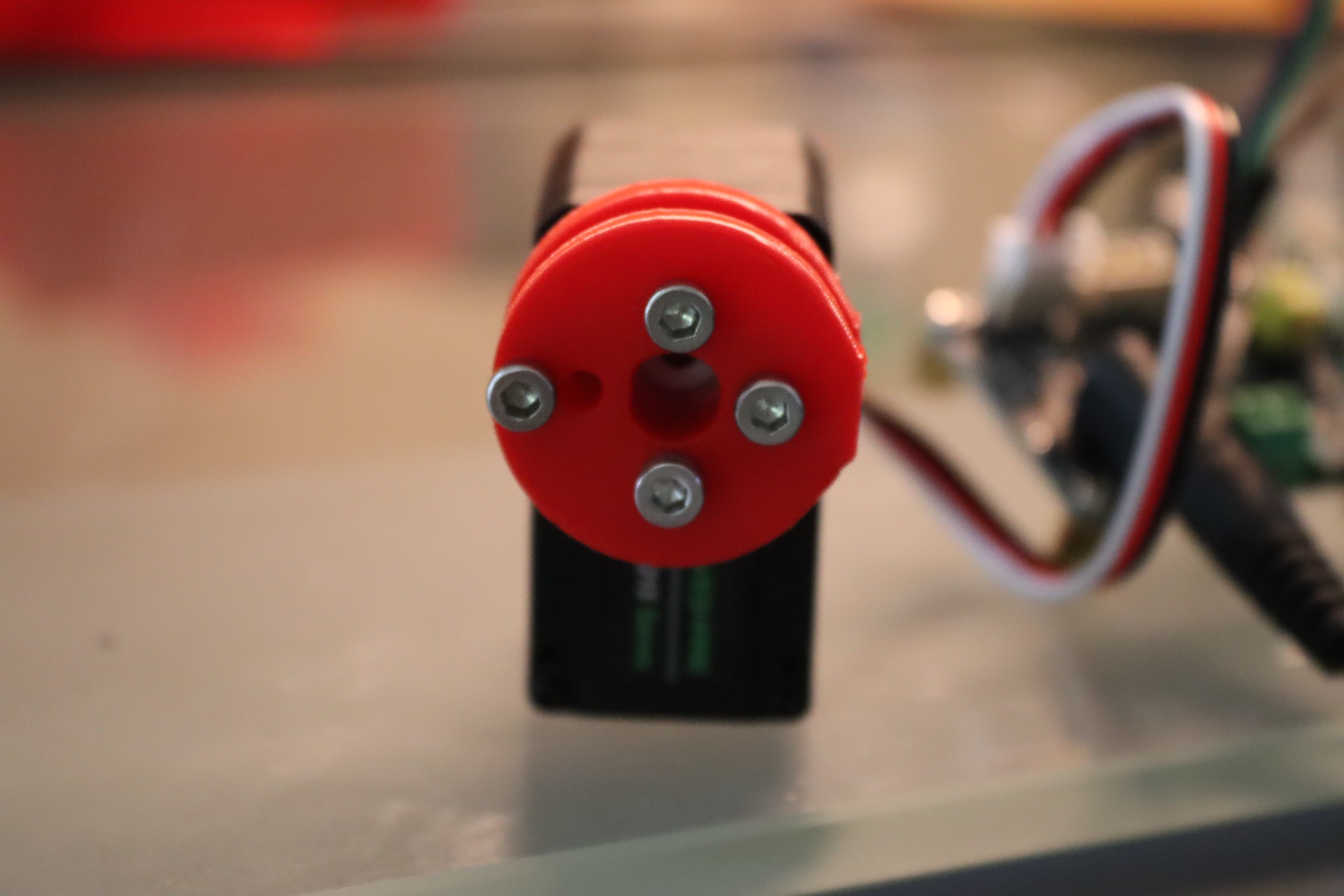
- Connecting the Take-Up Reel:
- Use 3 M3 by 16mm screws to connect the take-up reel to the servo horn.
- Use one M3 by 12mm screw to connect the wire that runs the finger.
- Use the set finger Arduino program to place the reel at the 9:00 position when the servo motor is at the 3700 position.
- Fasten the horn screw on the servo.
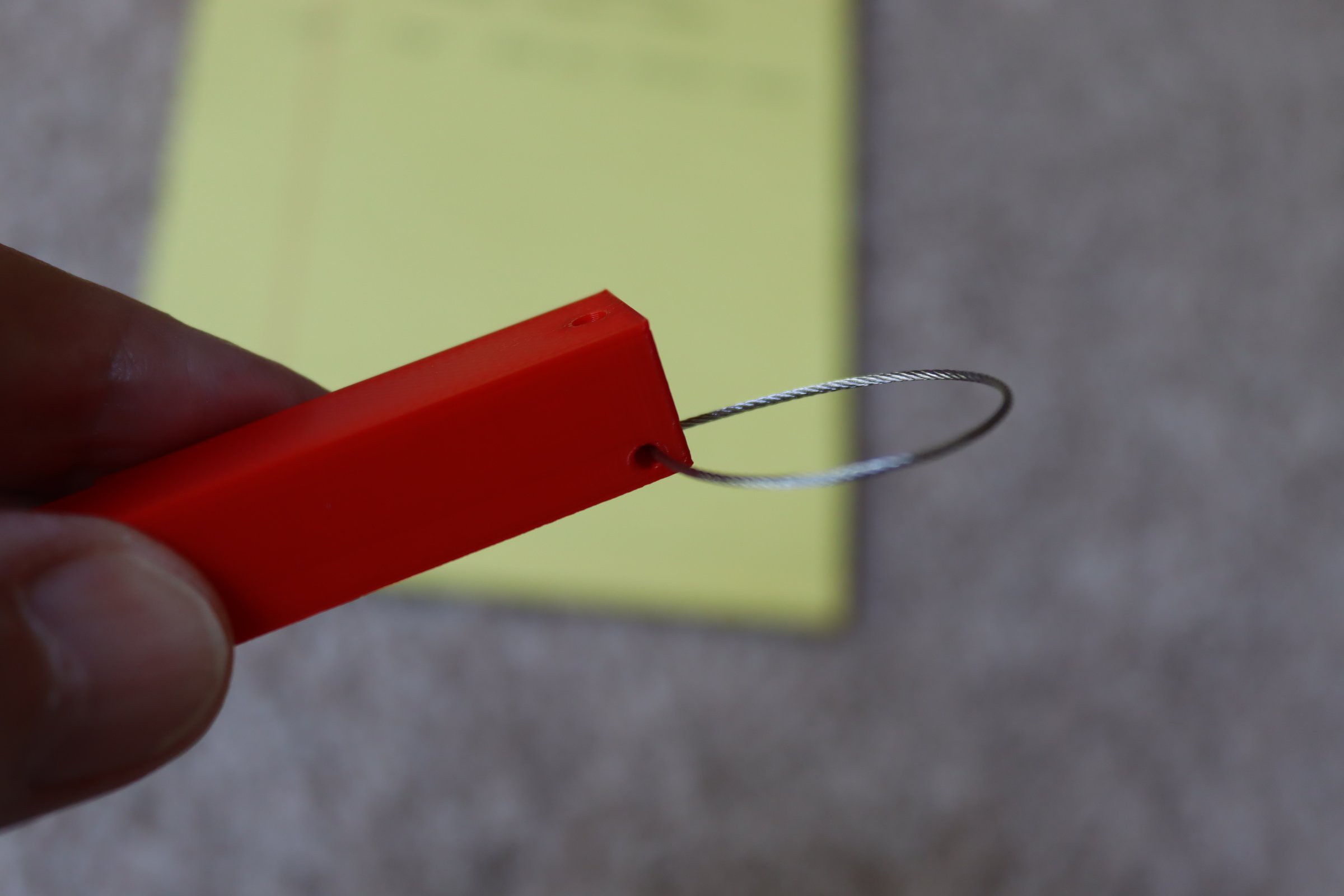
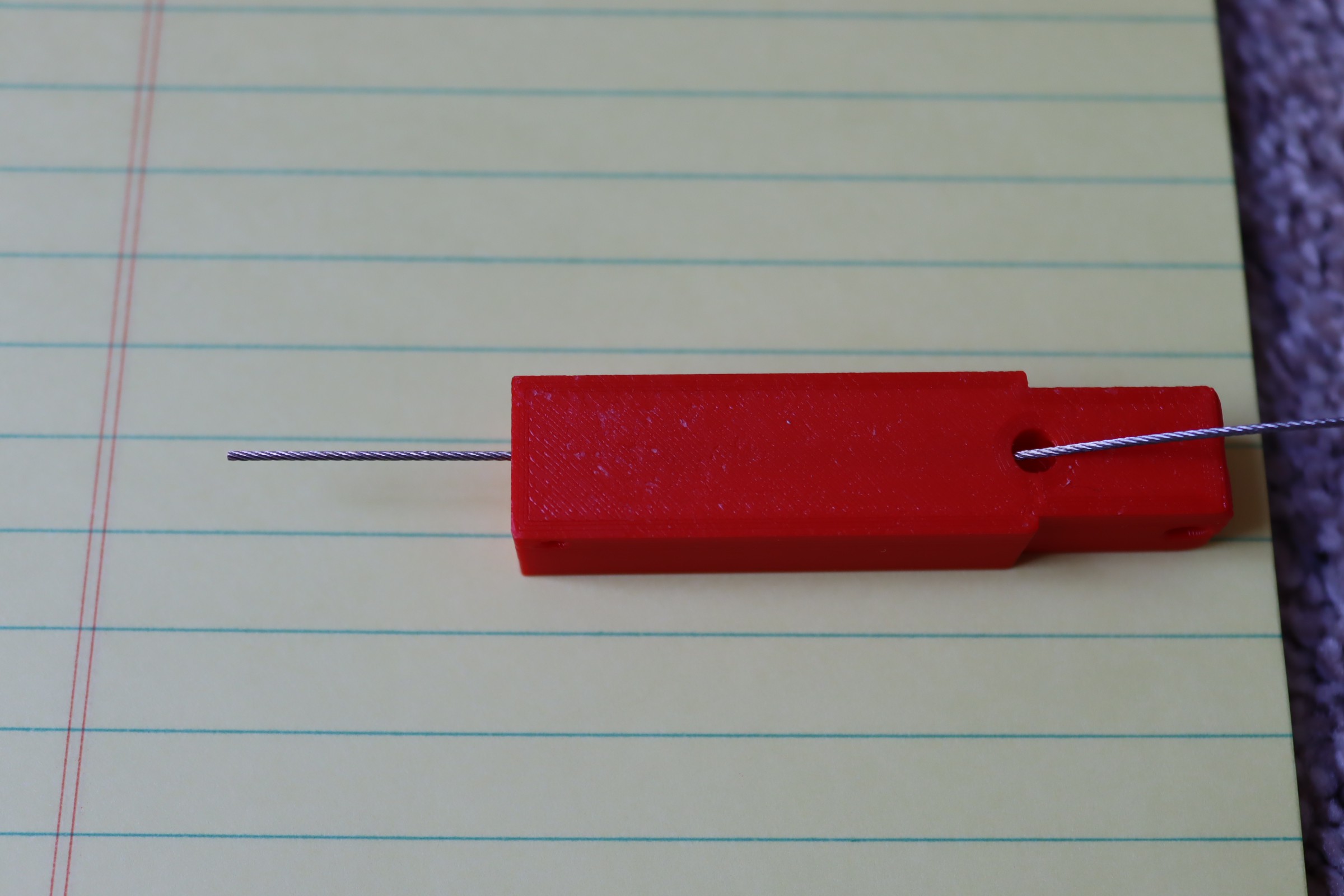
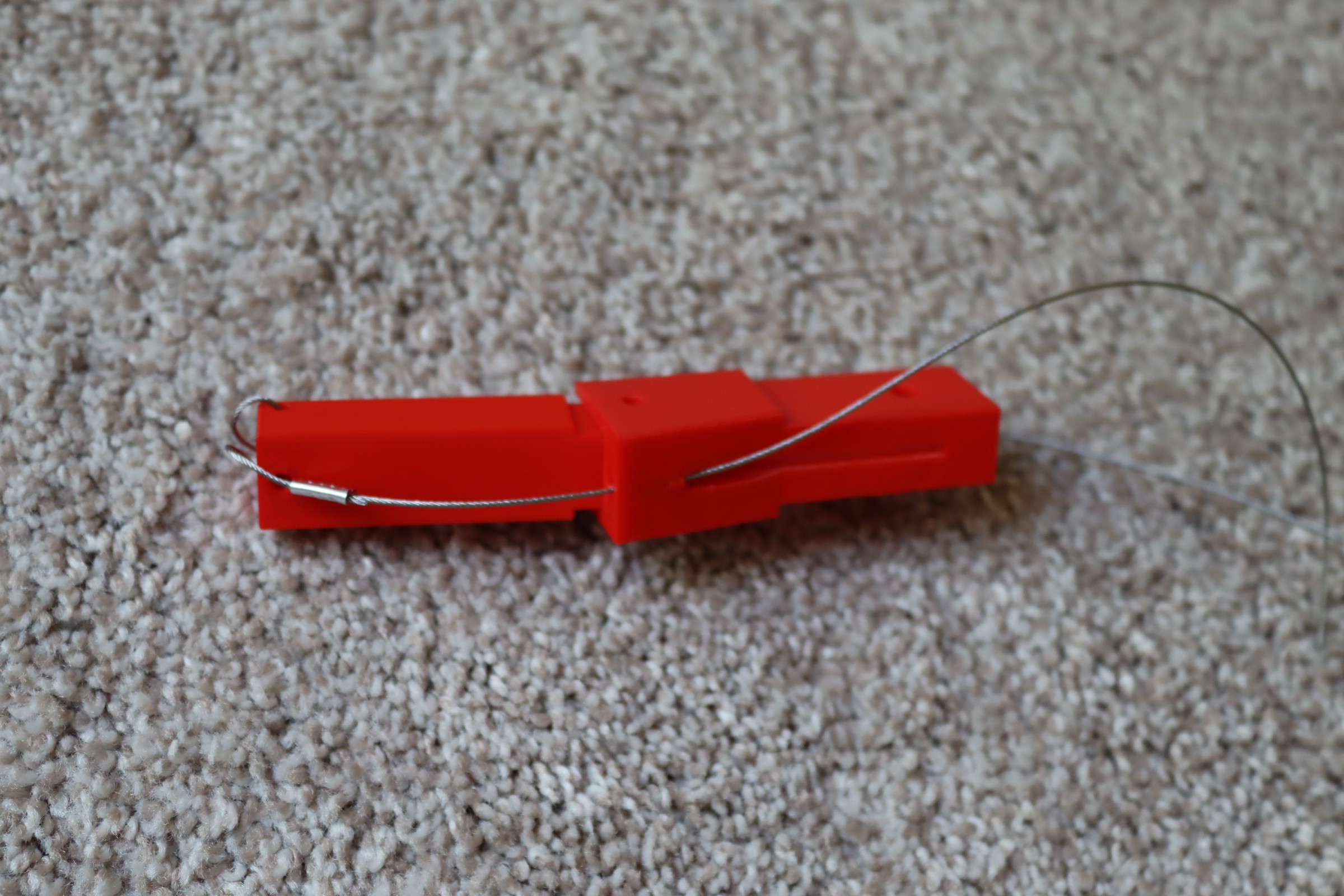
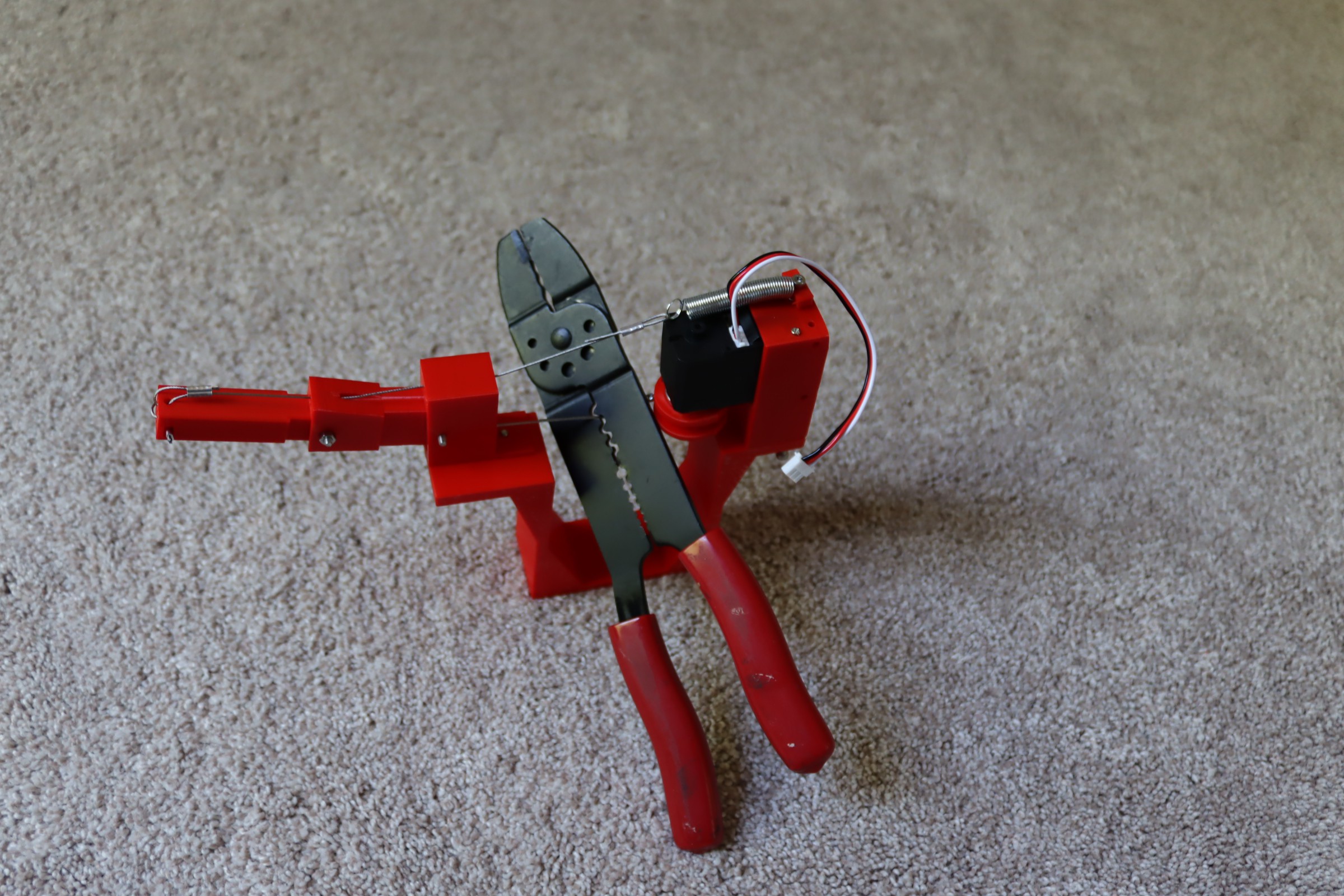
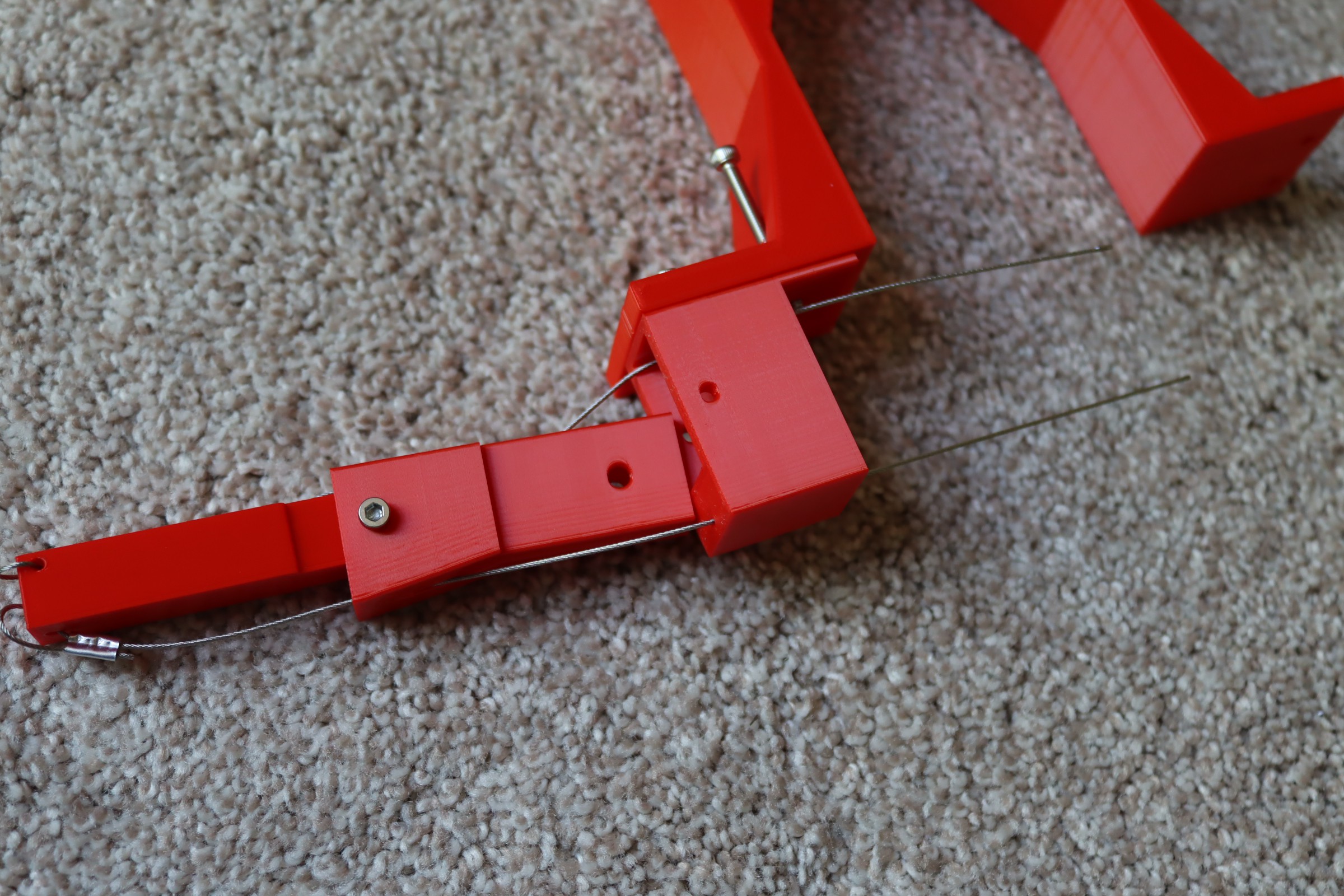
- Preparing the Cable Wire:
- Cut two 275mm pieces of thin cable wire.
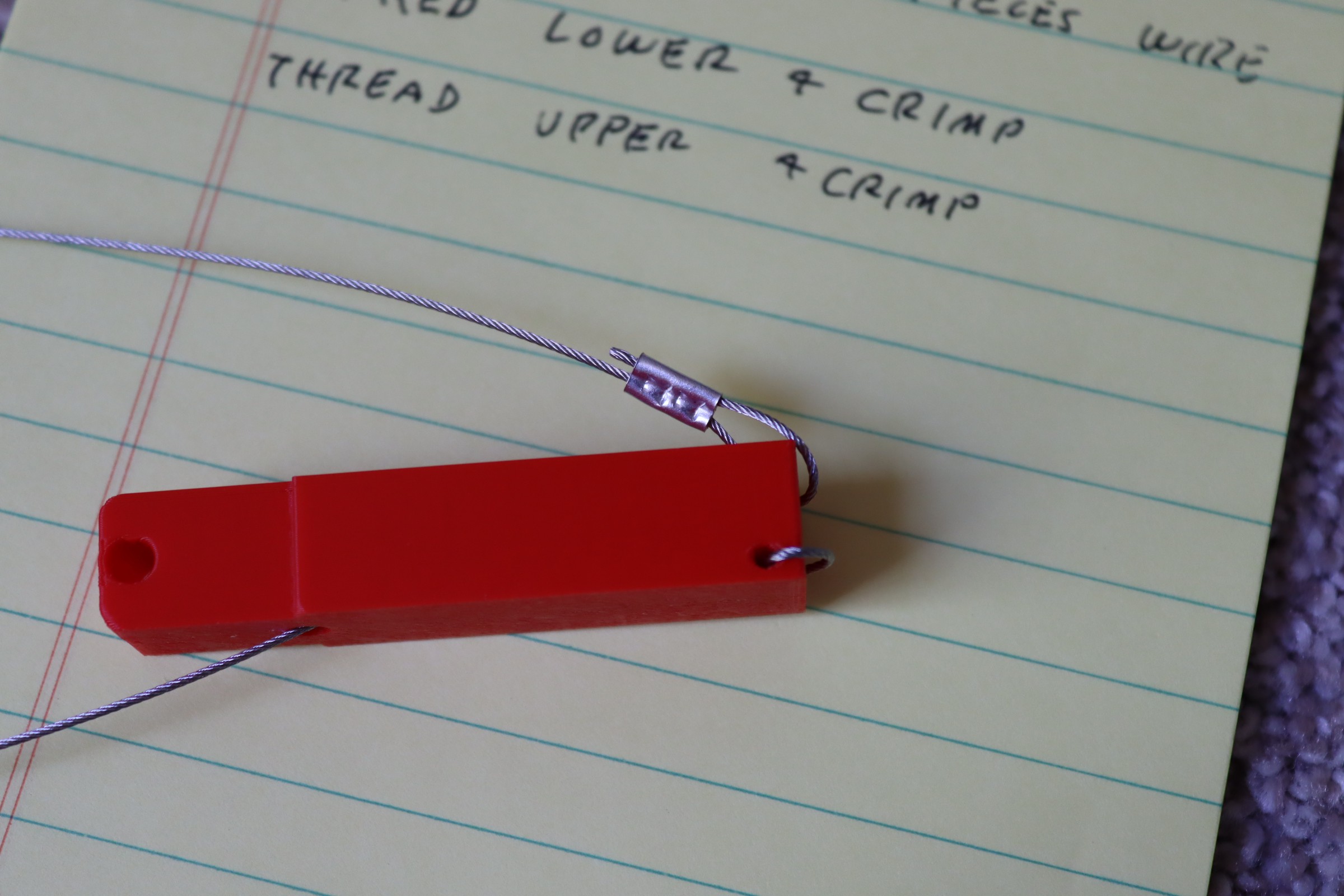
- Thread the lower wire through the end of the finger and crimp.
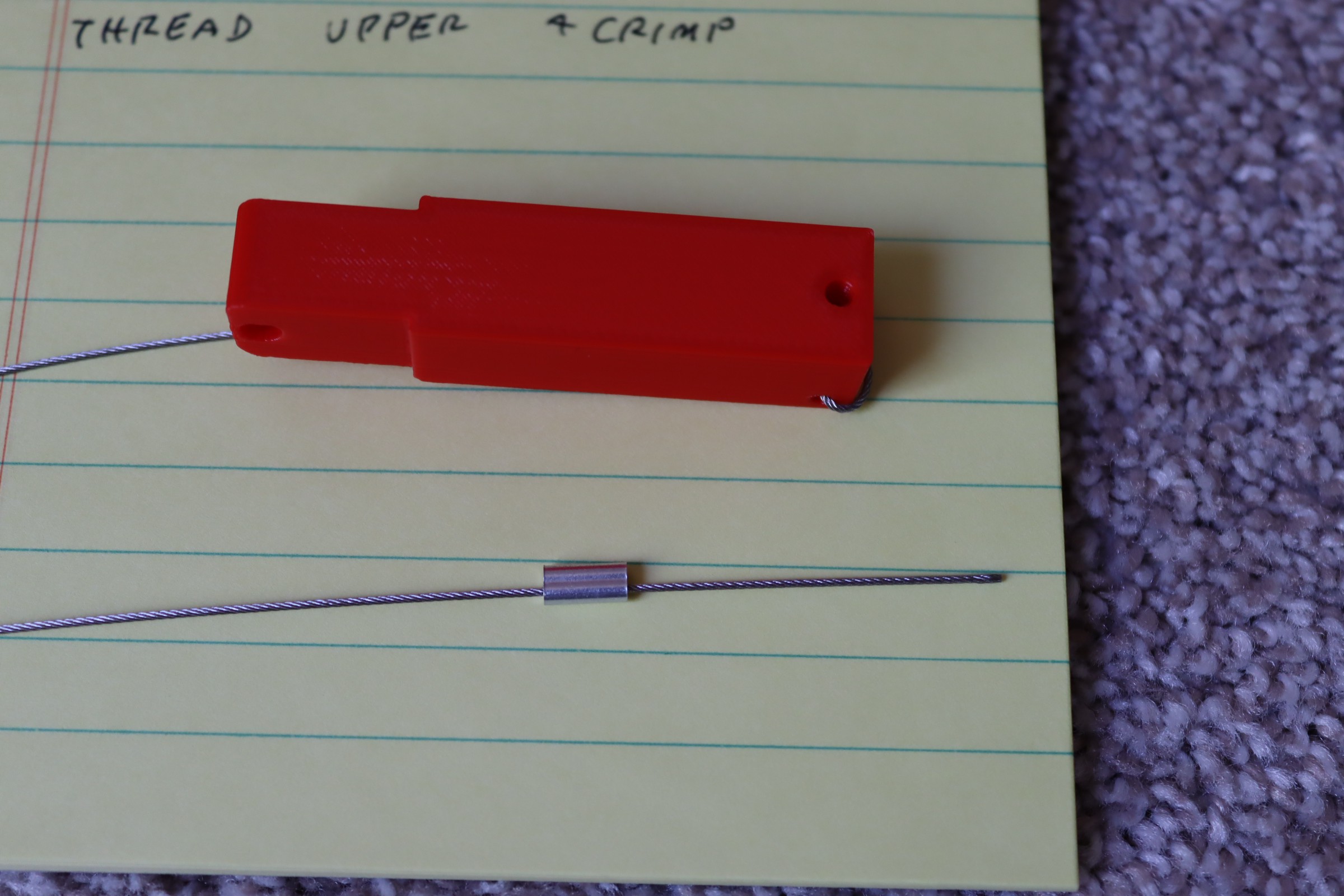
- Thread the upper wire through the end of the finger and crimp.
- Thread the lower wire through the middle finger and the upper wire through the middle finger.
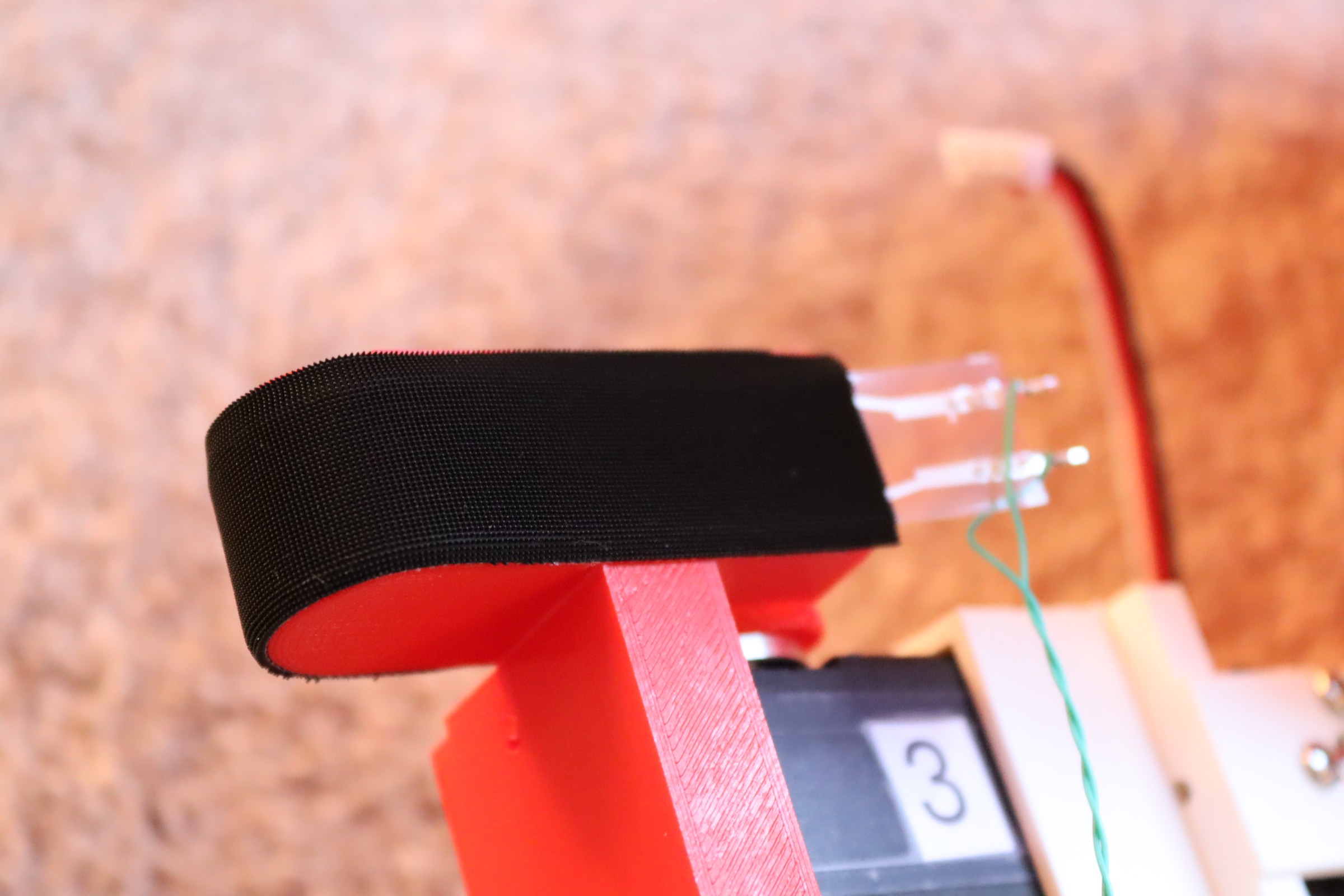
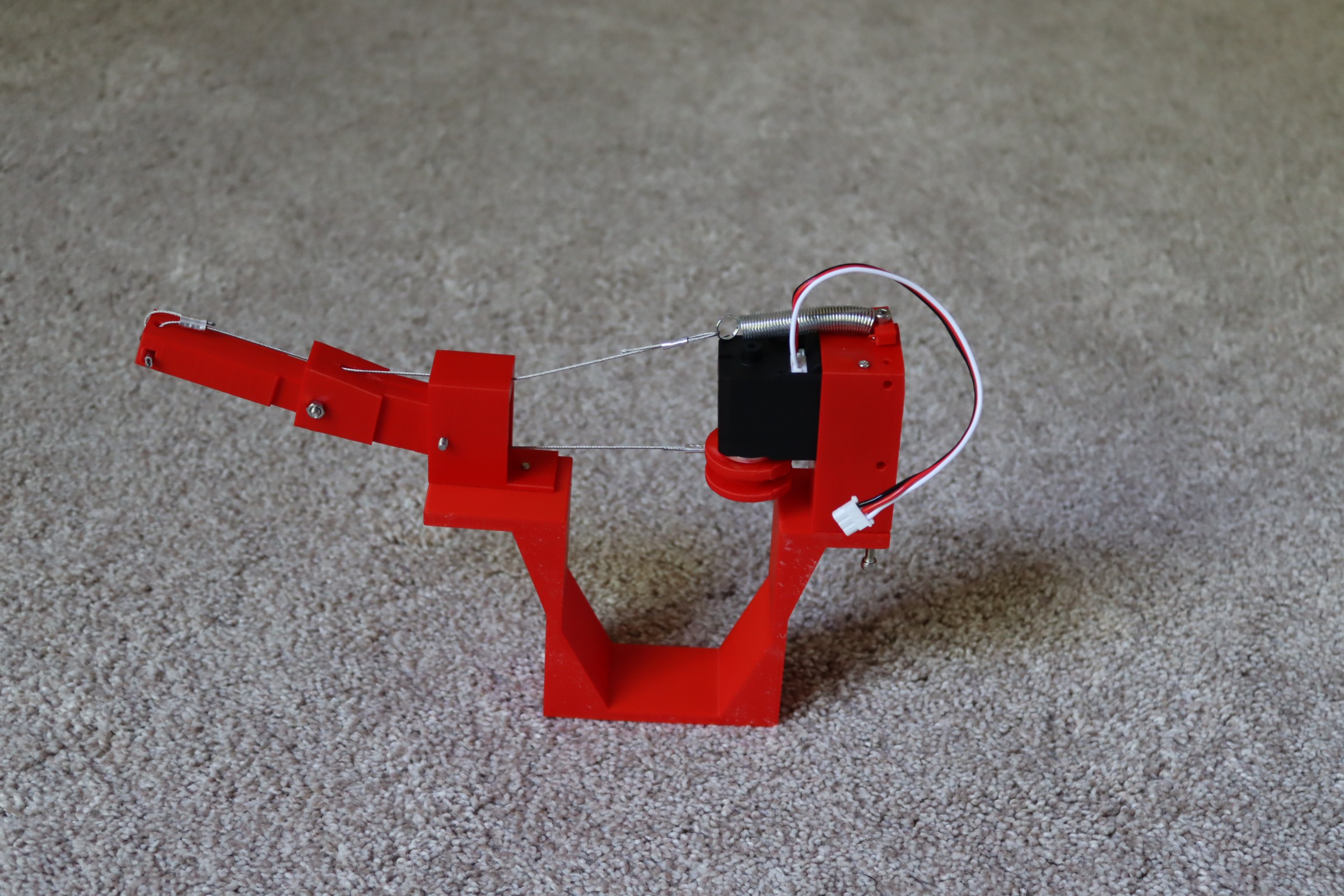
- Using the Setup Jig:
- Use a special 3D printed jig with 12mm and 30mm screws to hold the setup for the finger.
- Drill out a hole with a 1/8 inch bit--not designed into the setup jig.
- Install the knuckle on the setup jig.
- Connecting the Finger:
- Use an M3 by 20mm screw to connect the end of the finger to the middle of the finger, serving as a bearing for the finger.
- Thread the upper wire through the knuckle.
- Install an M3 by 25mm screw through the knuckle as the bearing point.
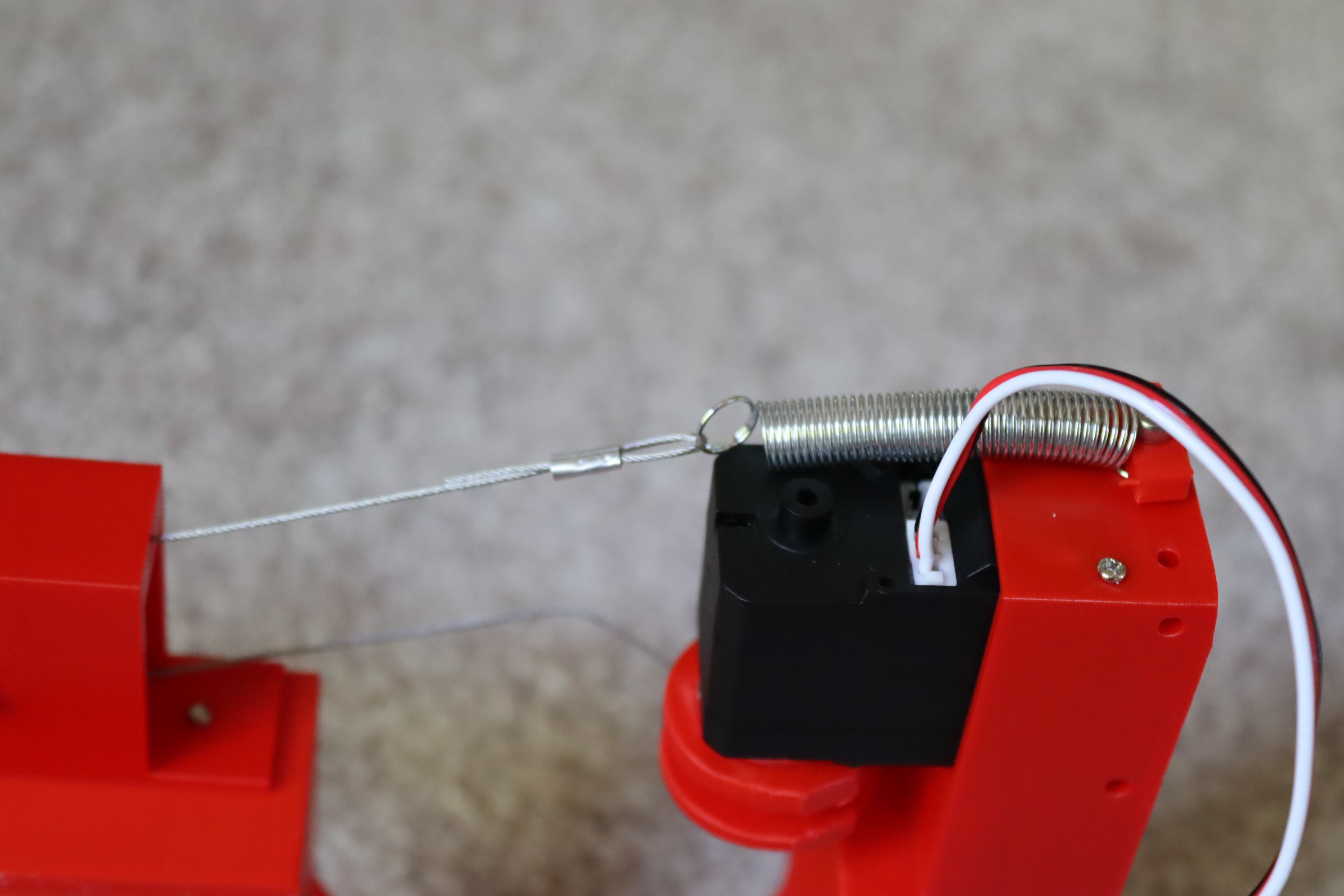
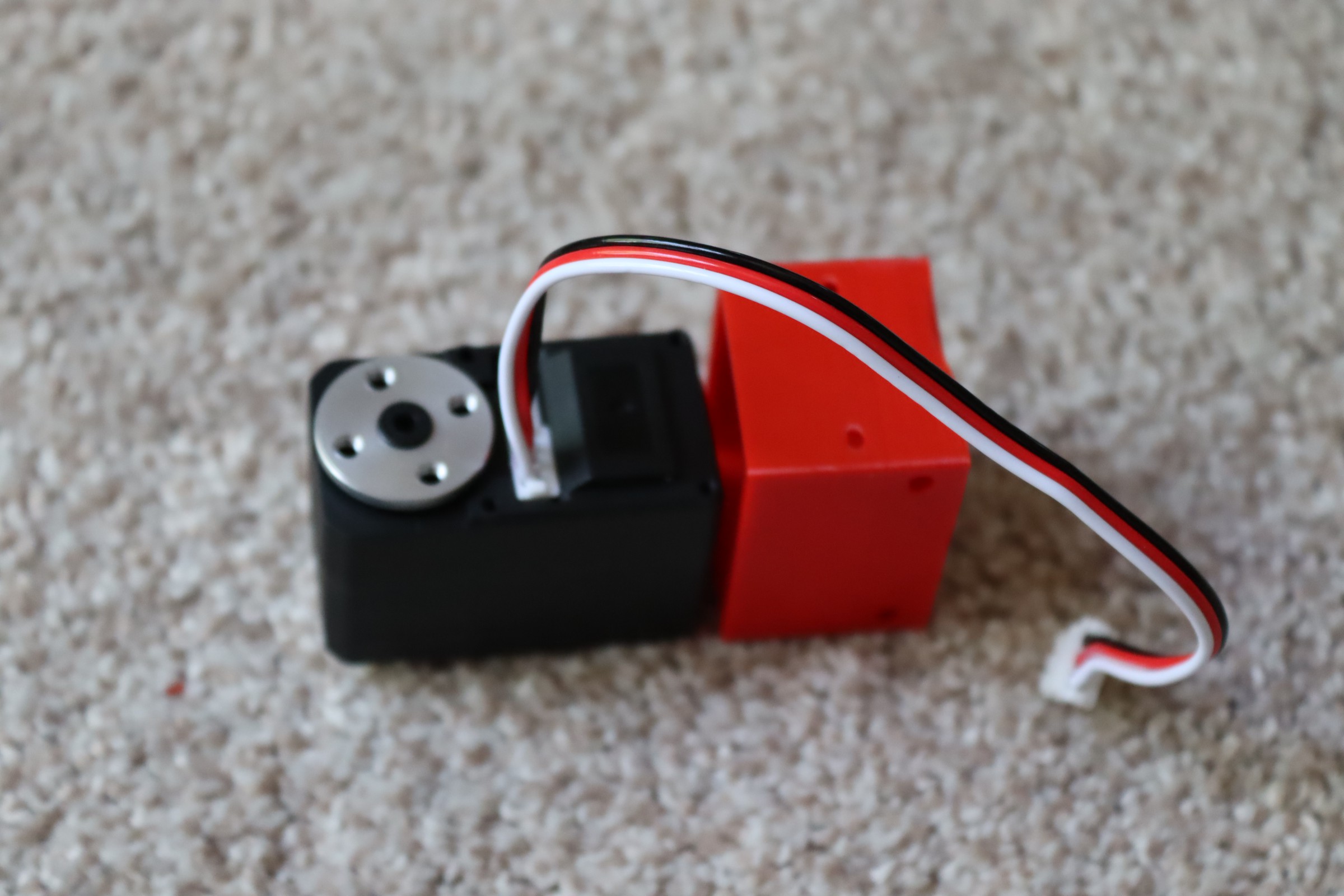
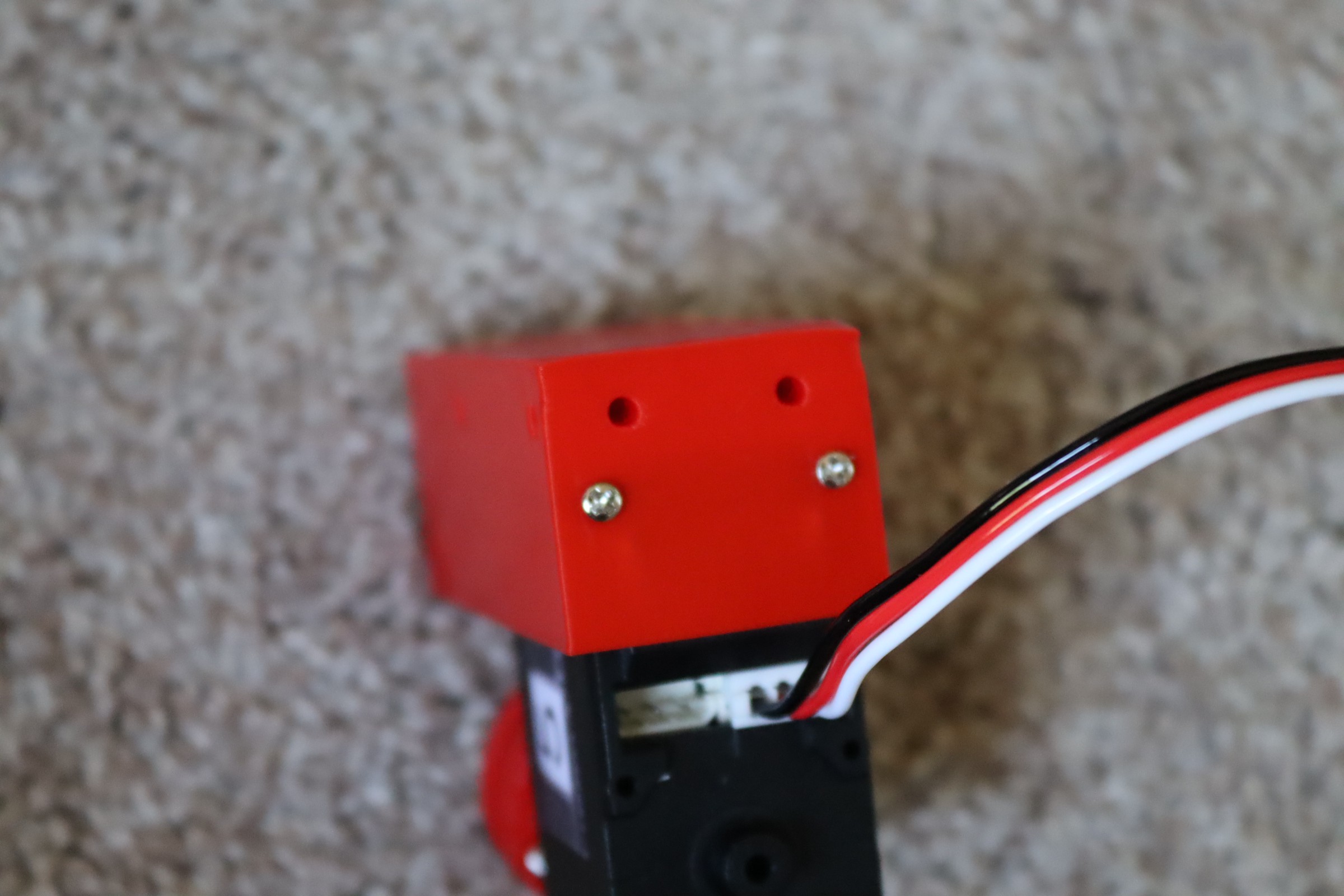
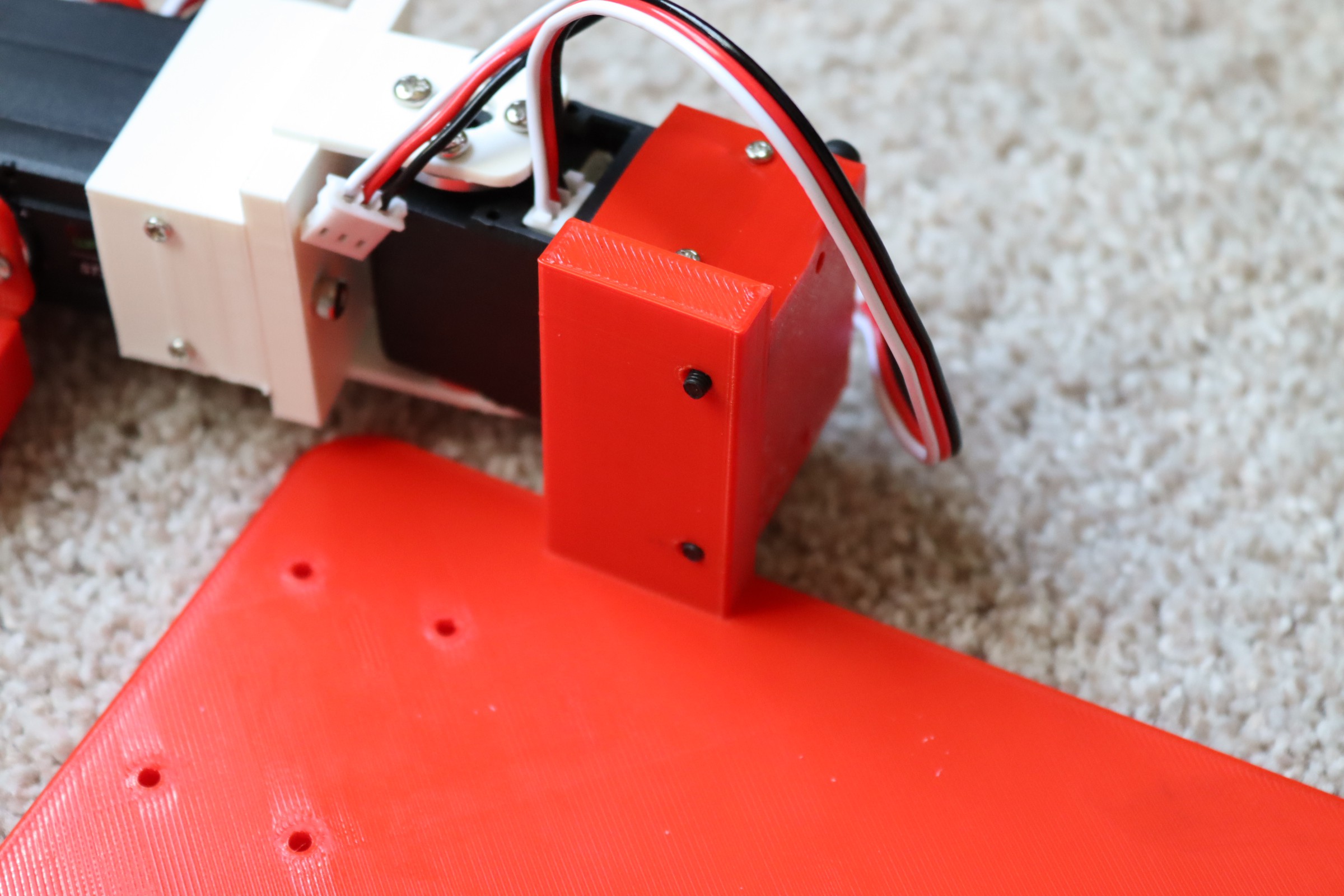
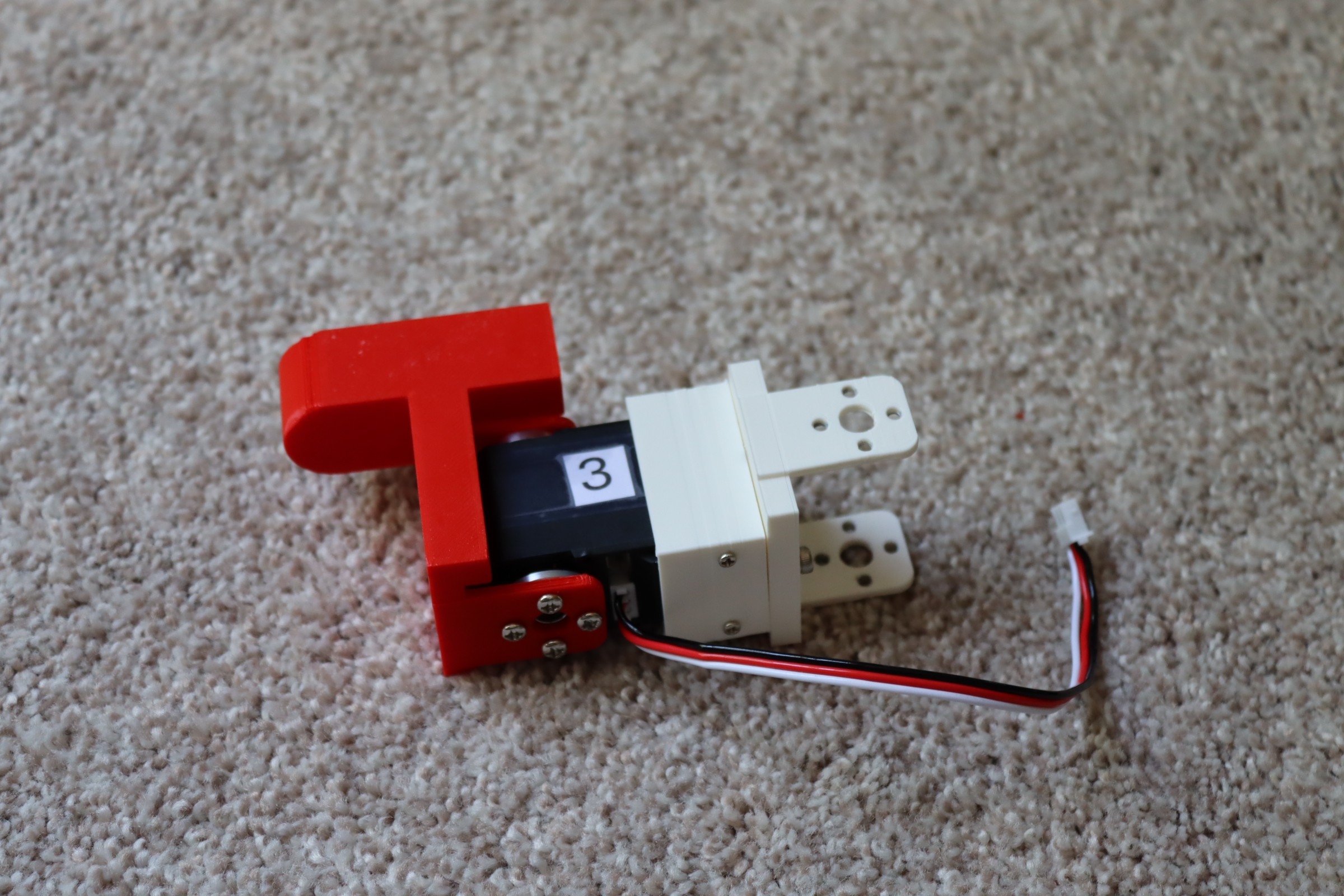
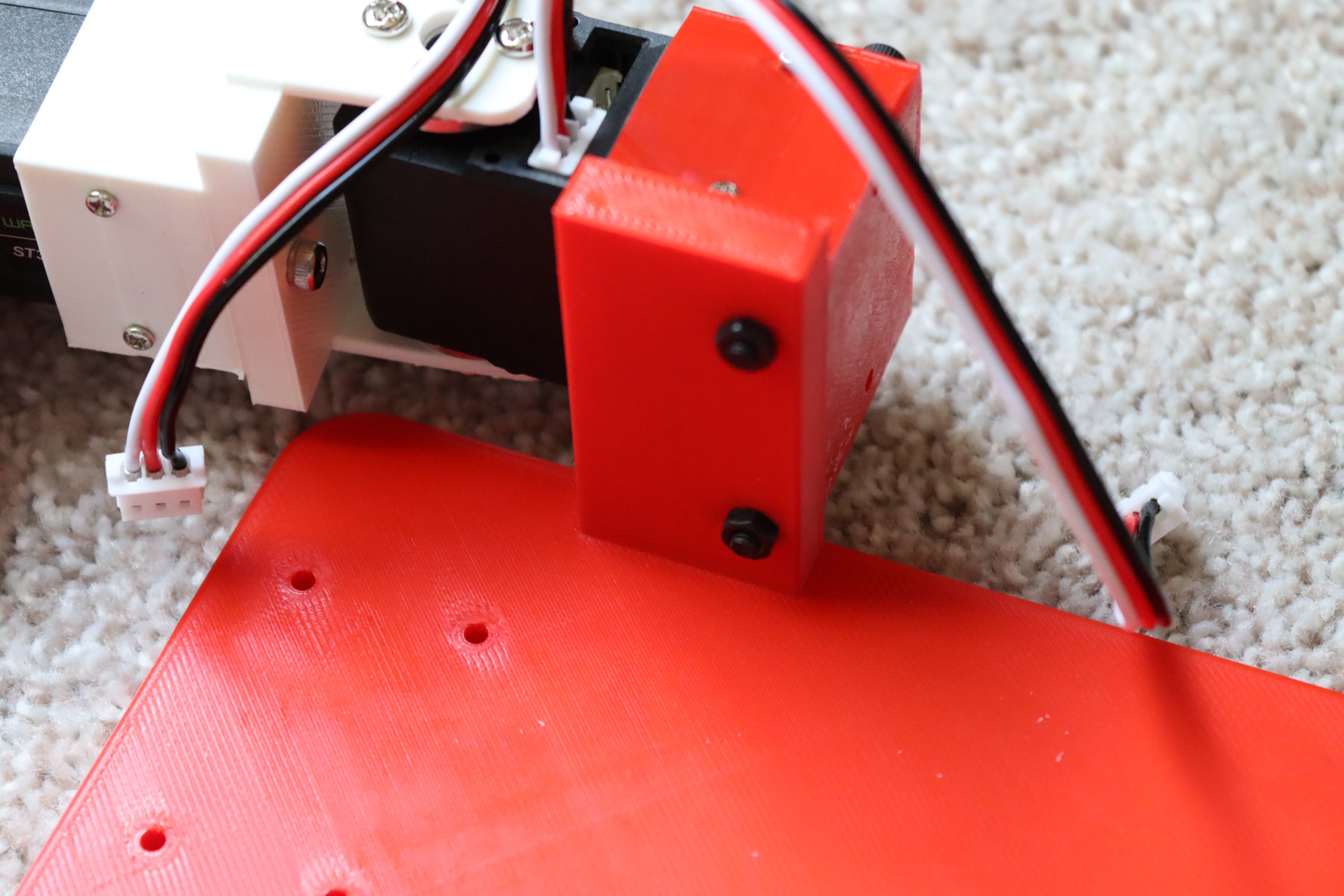
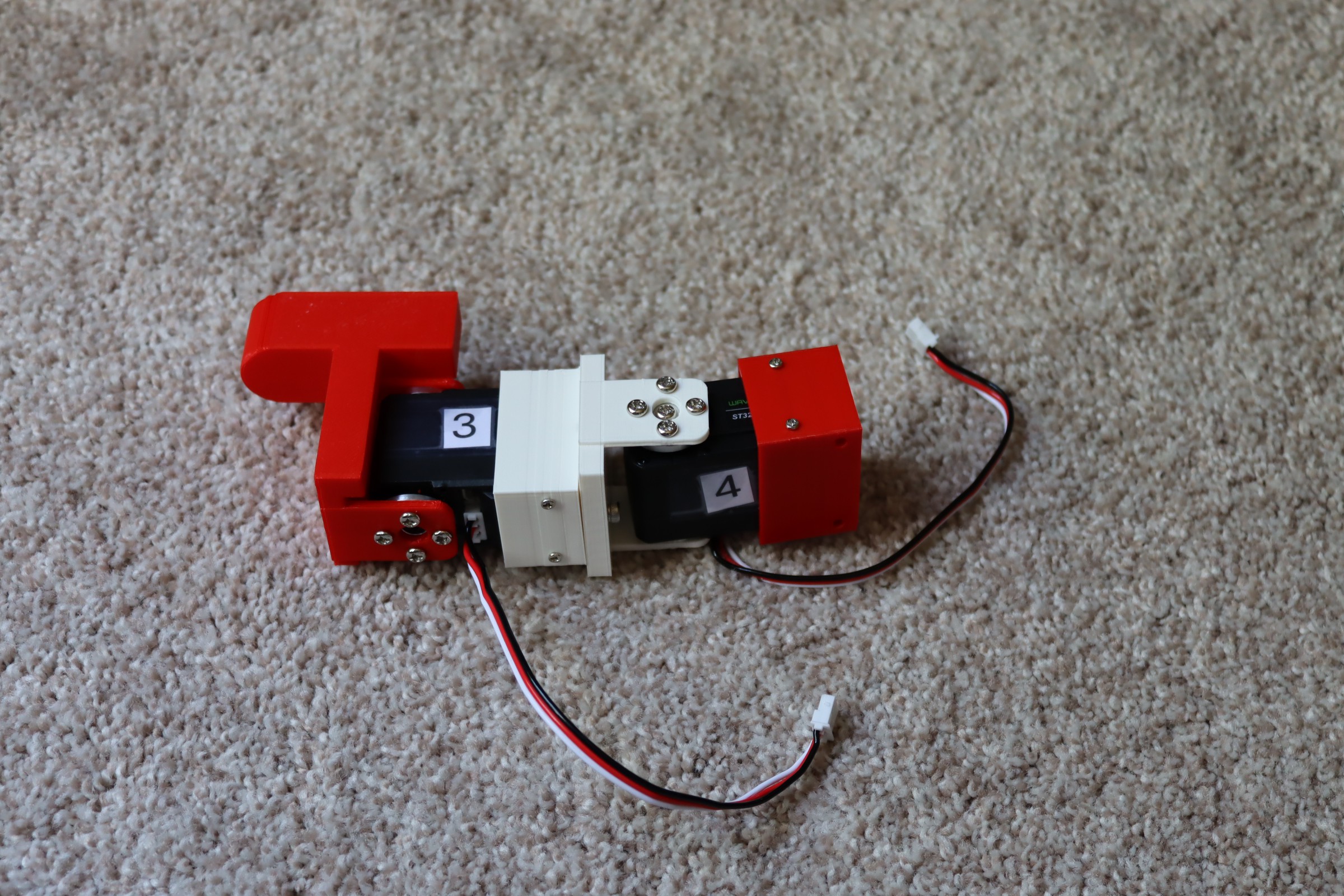
- Securing the Servo Motor:
- Secure the servo and the servo motor mount using the four tiny screws included with the servo motor.
- Install the servo motor to the rear of the test jig using 2 M3 by 20mm screws.
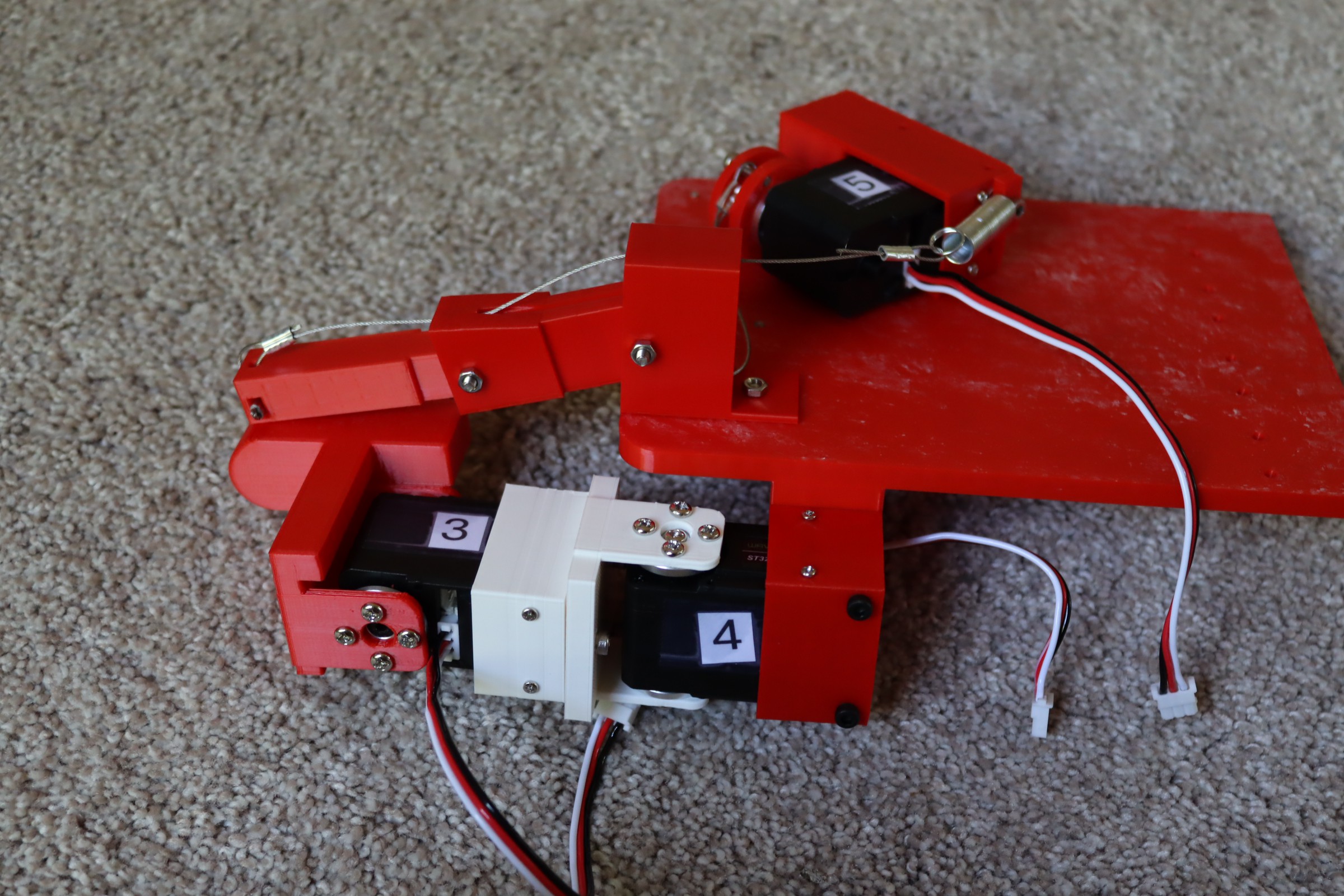
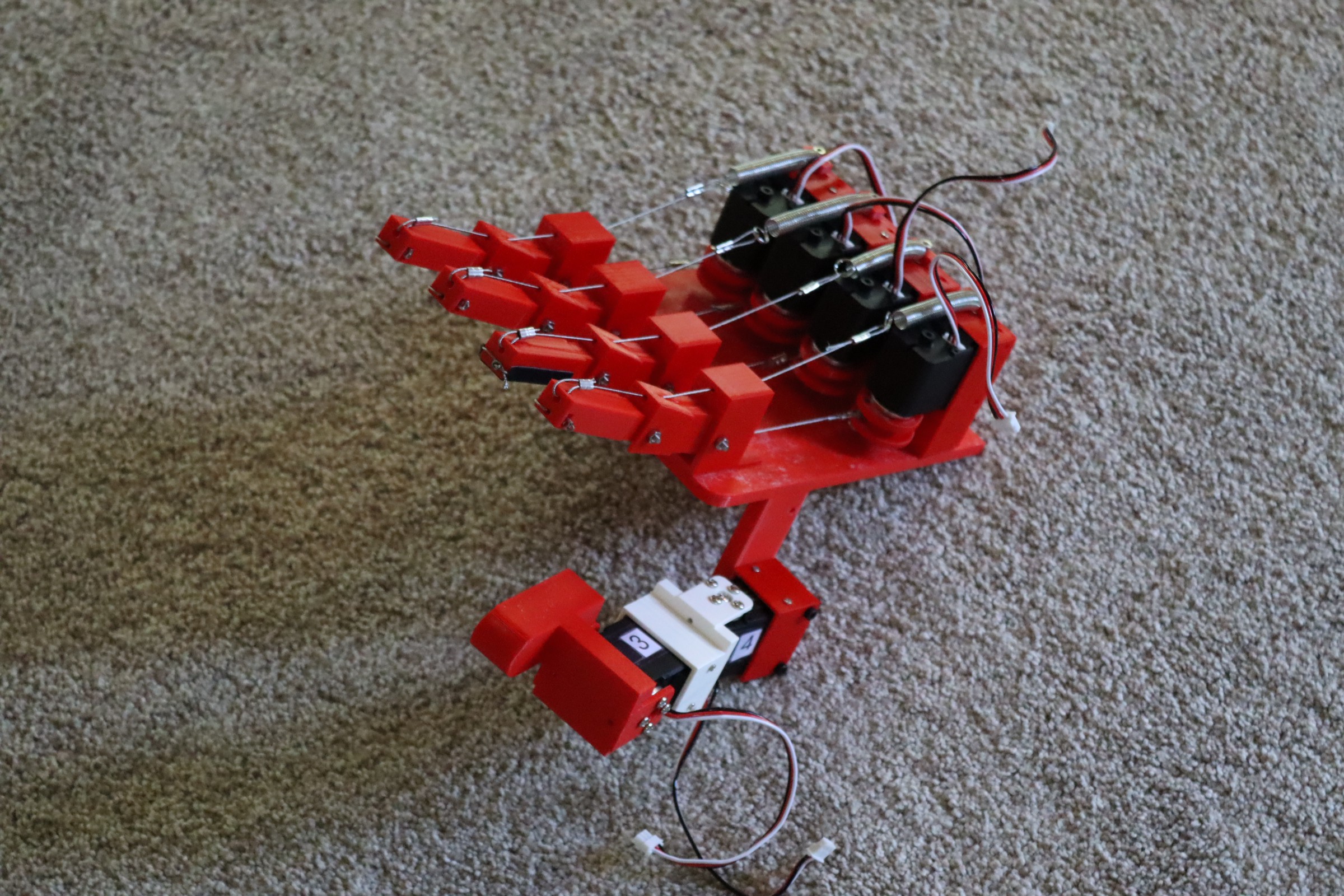
- Fasten the extension spring (8.7mm diameter by 46.8mm long) to the top of the servo mounting housing.
- Use an M3 by 12mm screw through the 3D printed washer to hold the spring.
- Tightening the Cable:
- Tighten the cable so that the finger is fully in the up position and crimp the cable.
- For the lower cable, press the special crimp onto the cable, thread the cable through the lower pulley, tighten, and crimp the cable.
- Remove the setup jig.
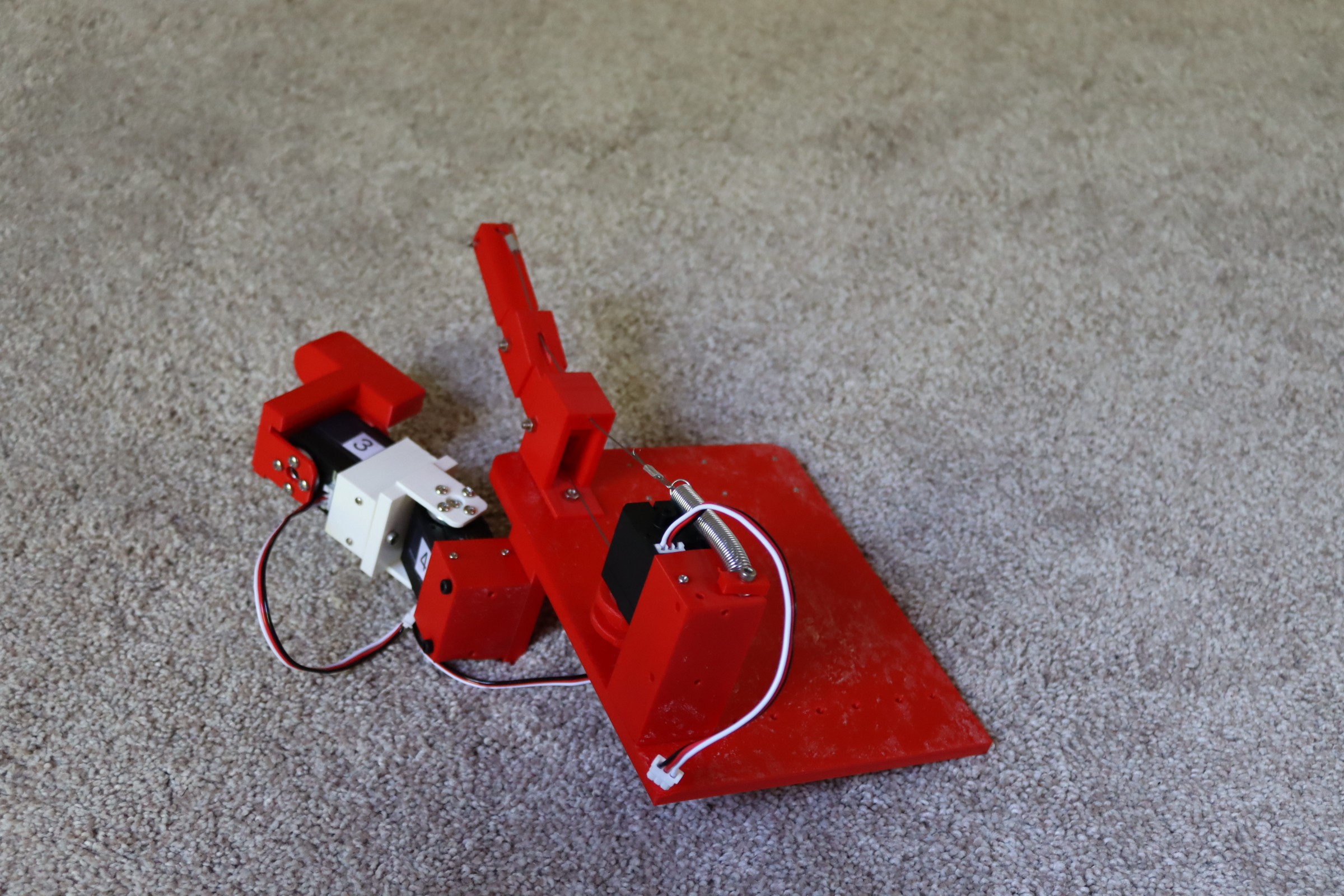
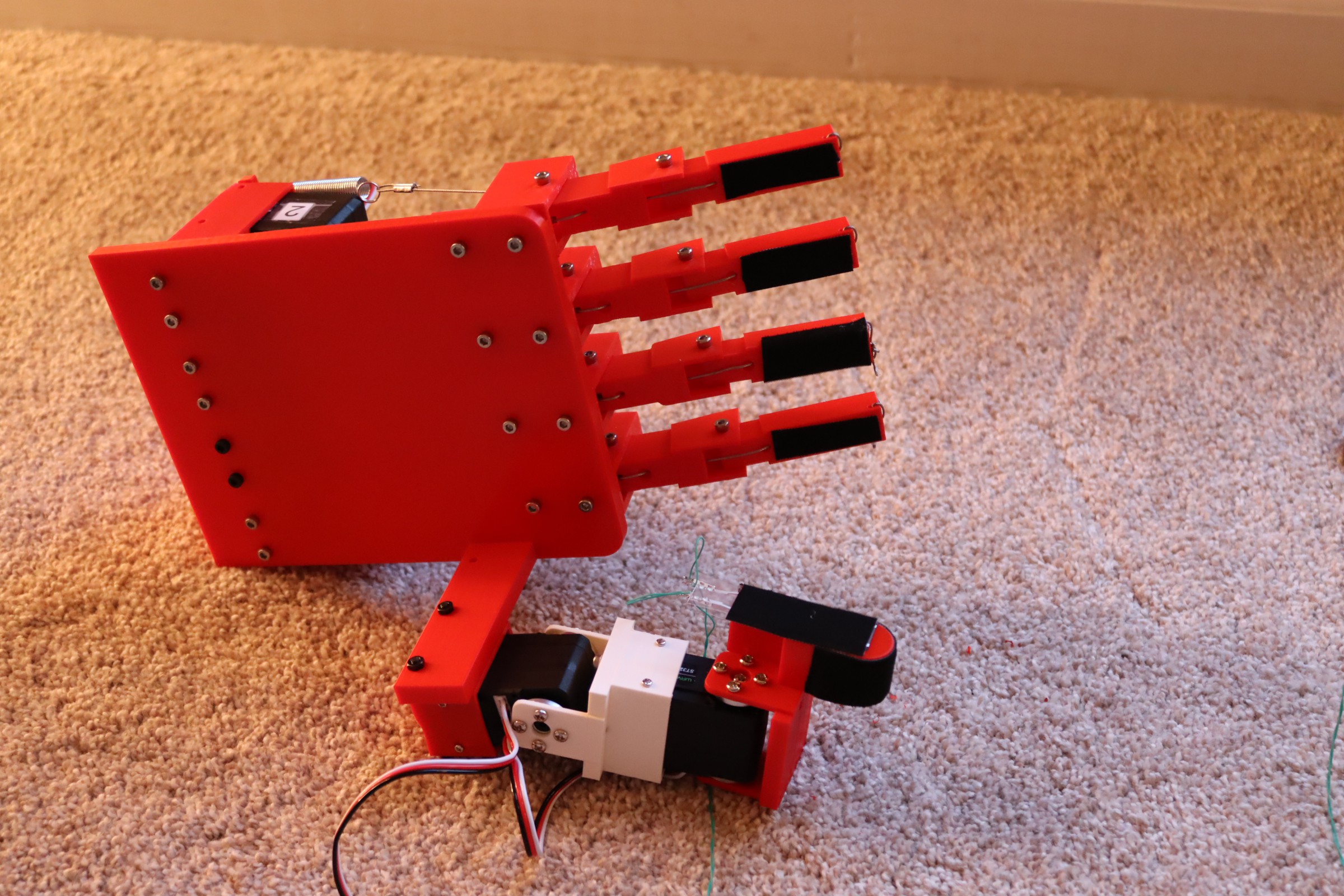
- Final Assembly:
- Use 2 M3 by 10mm screws on the front of the wrist and two M3 by 30mm screws on the rear of the wrist.
- Fasten the finger and the servo motors.
- Repeat this process three times.
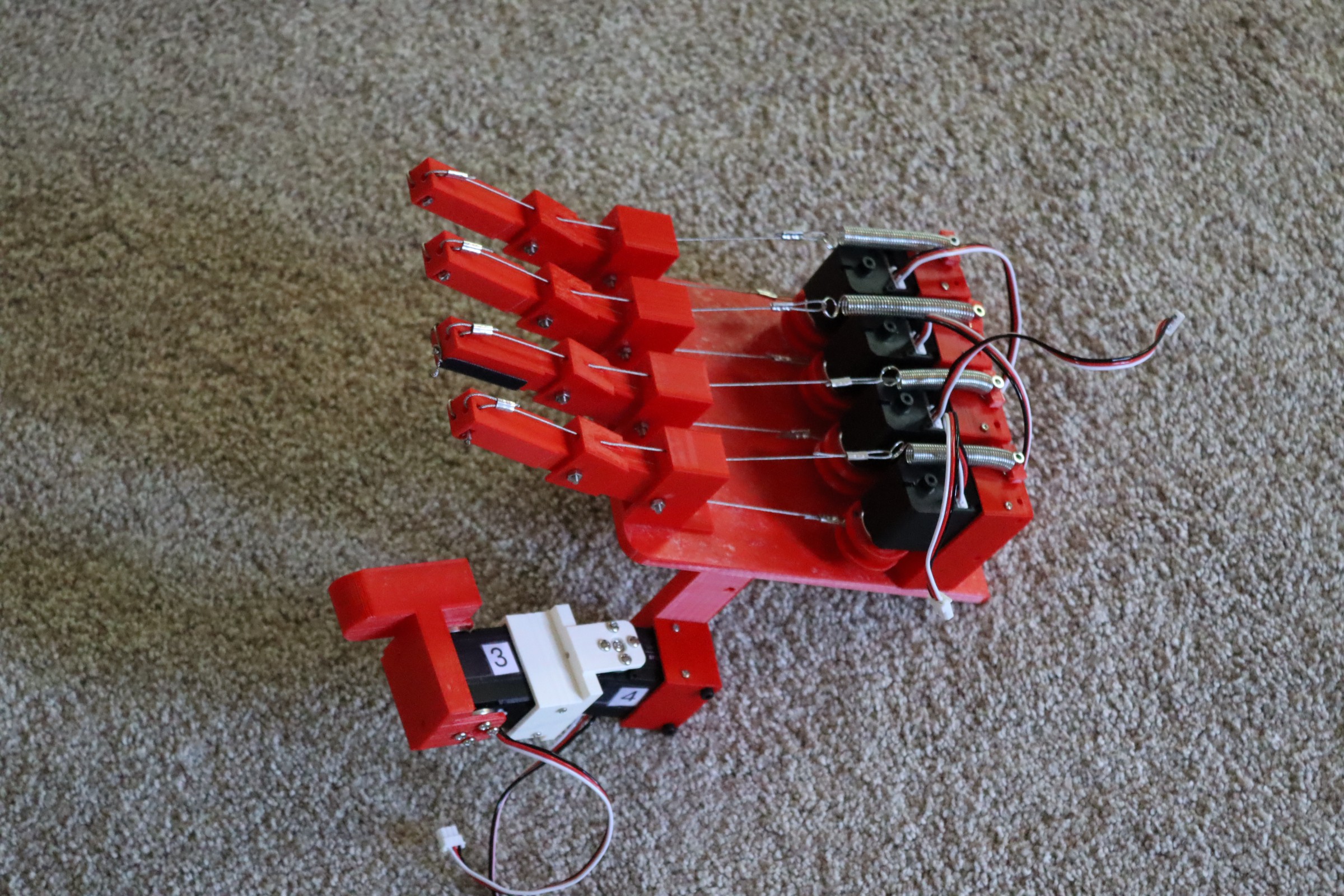
- Fasten the thumb as shown in the photos.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
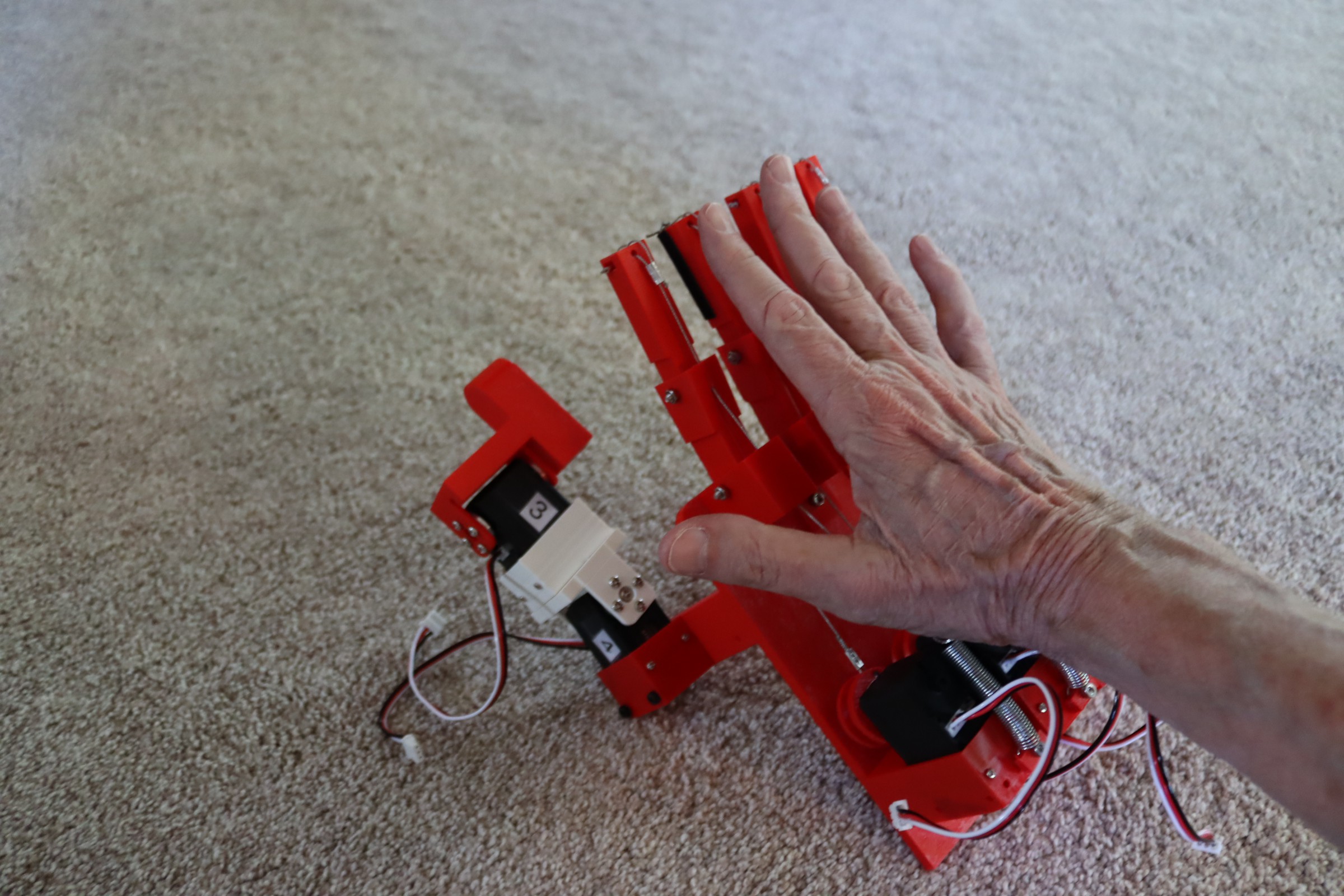
Five Finger Robot Hand
I have been working on robot grippers for a humanoid and this is an Arduino powered, servo motor controlled, 3d printed hand.