Progress:
Hardware design:
- Defining the motor
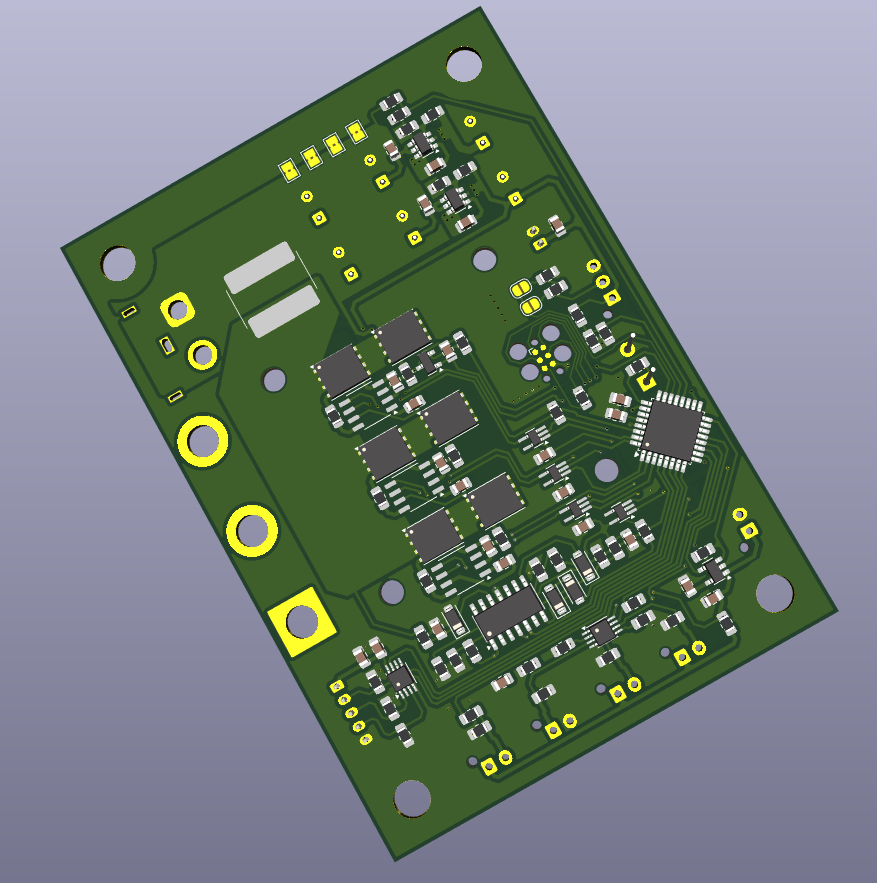
- Architecture & hardware shutdown
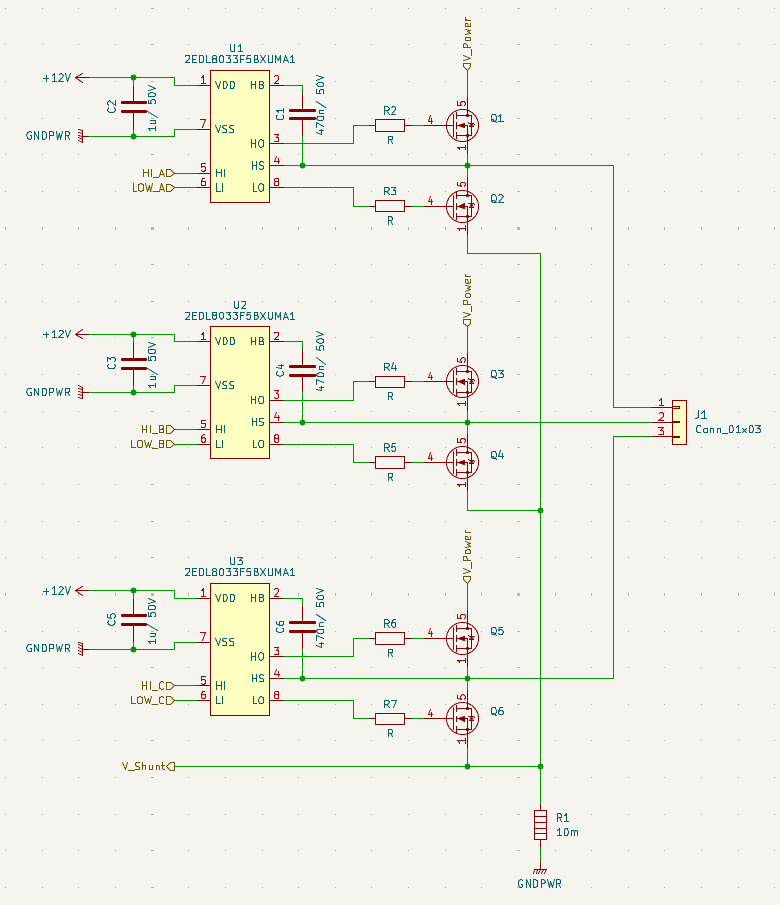
- Output stage
- Overcurrent and shutdown
- Sensor connection
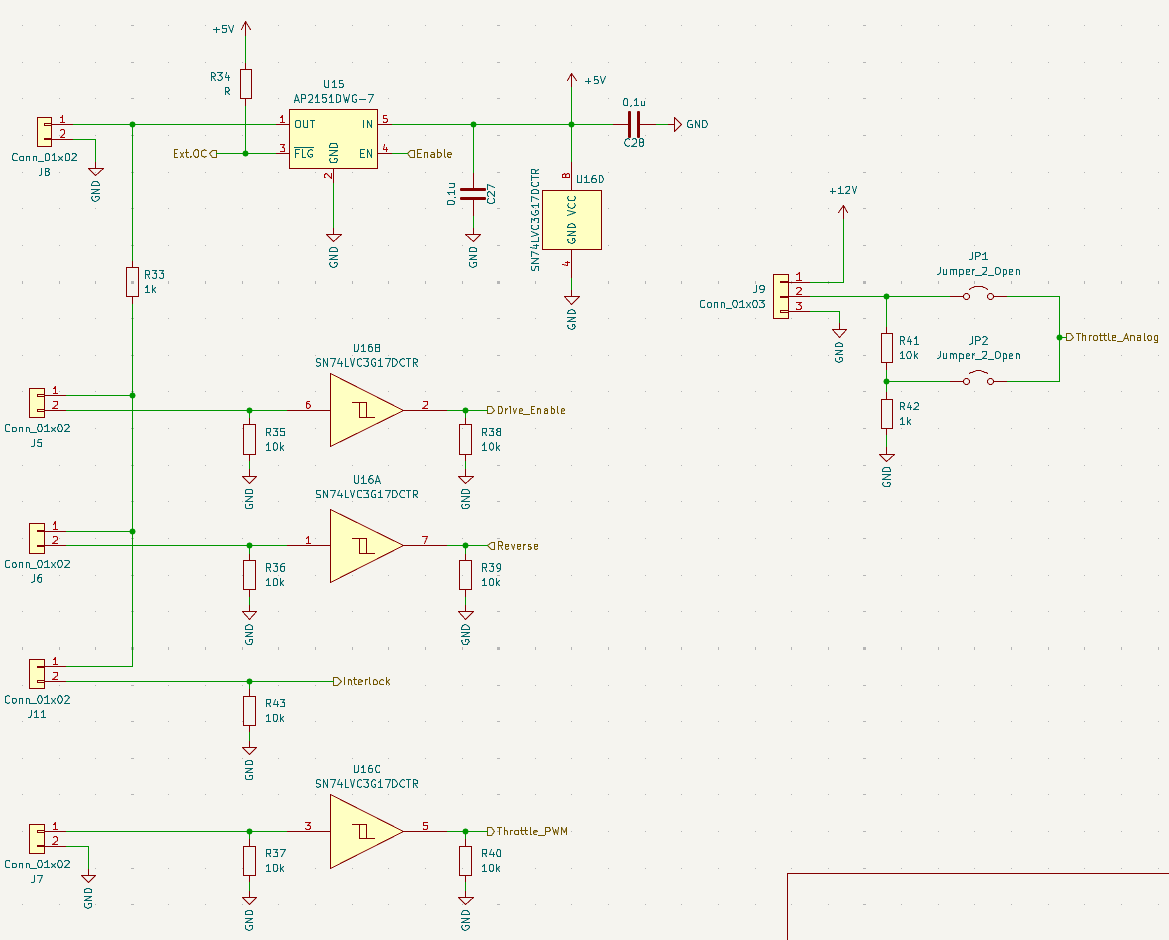
- User input
-
-
The plan:
The driver shall have following functions:
Motor:
- 36V/15A
- External 5V for sensors
- Analog overcurrent shutdown
- At least block commutation (no FOC for now)
- Speed feedback
Peripherals:
- Temperature sensing
- Either 12V throttle or PWM input
- Emergency shutdown capability
- Serial connectivity
- USB configuration
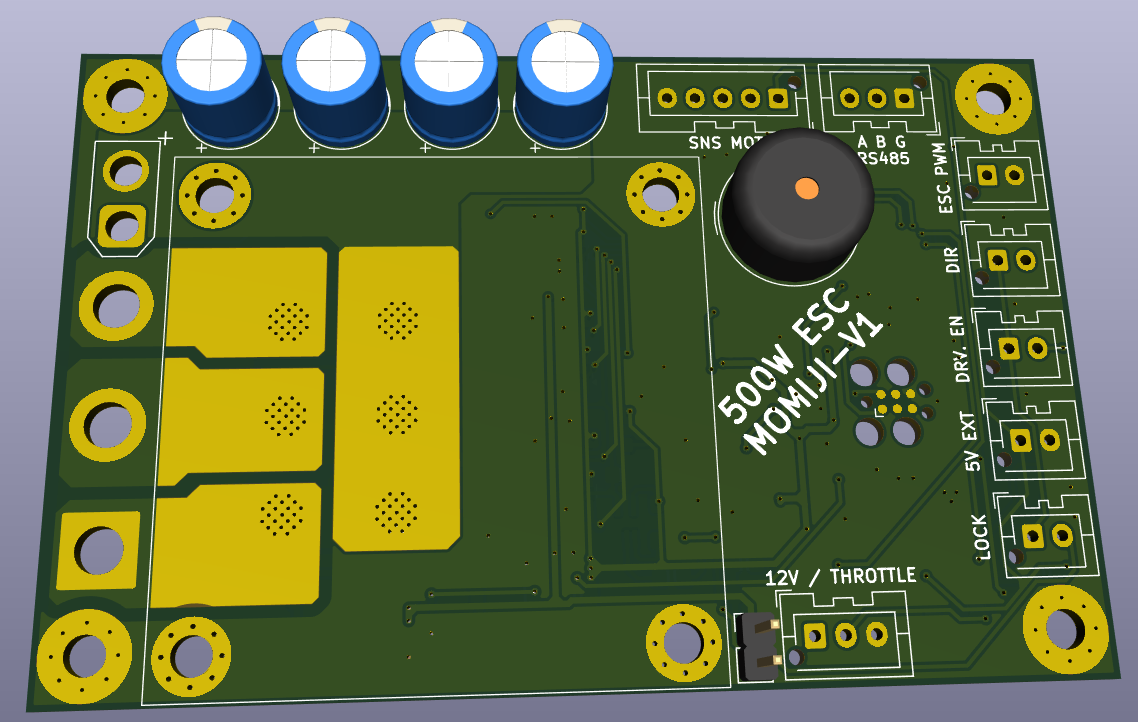

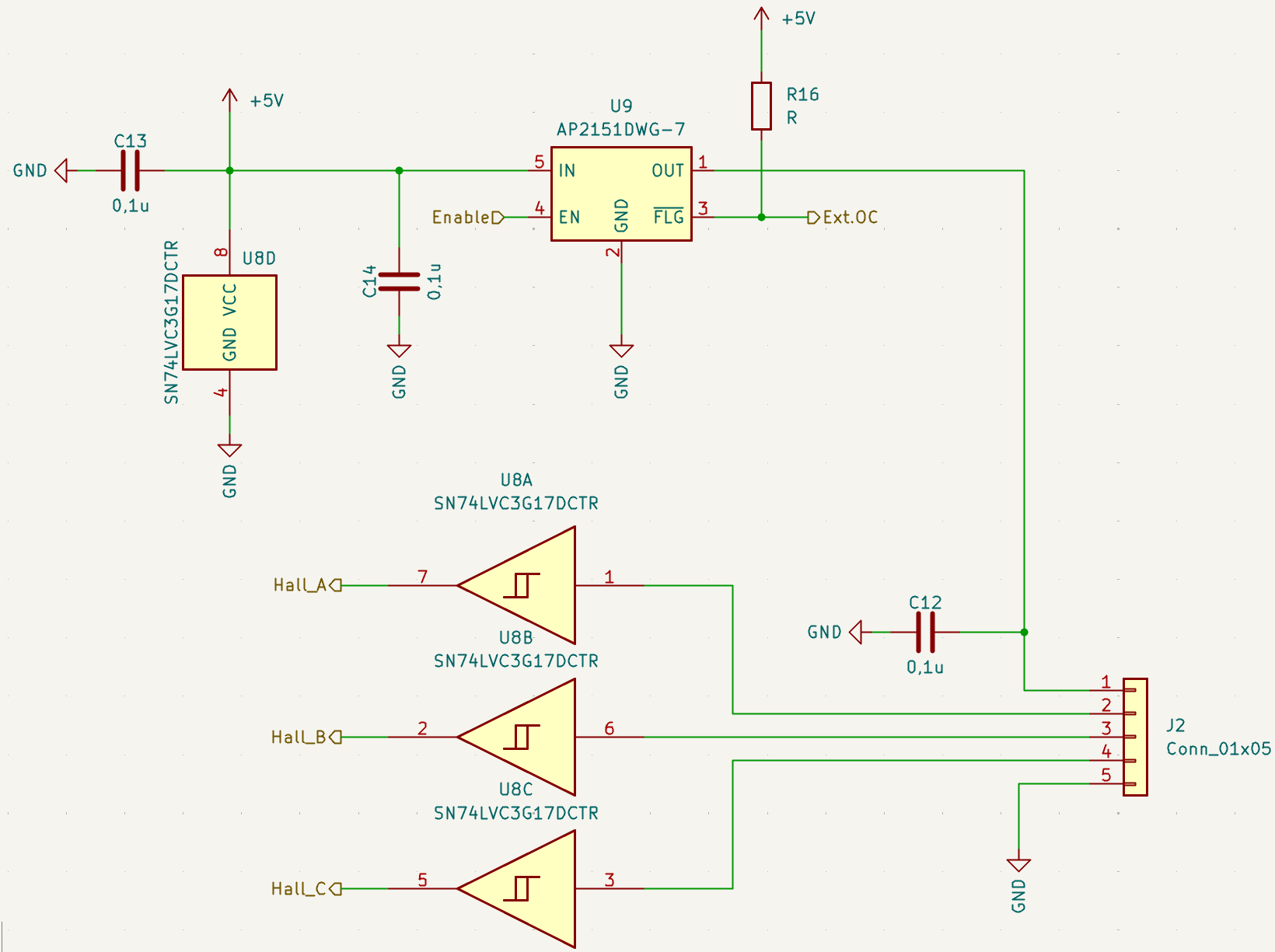 Another important part. The connection to the sensors.
Another important part. The connection to the sensors.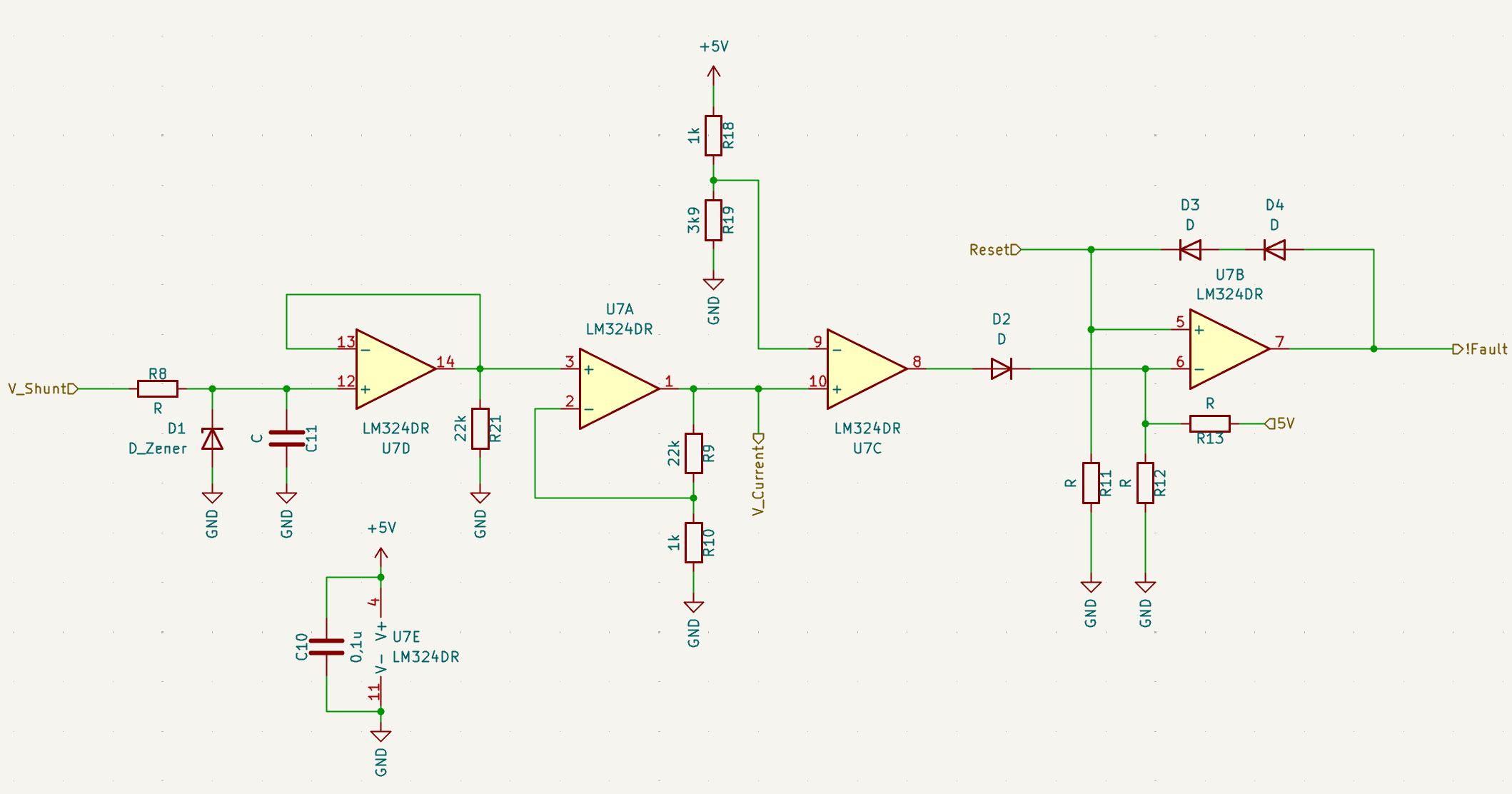


 These (propably chinese) hubmotors dont have any useful marking that would let us find a datasheet or anything so we need to make some assumptions.
These (propably chinese) hubmotors dont have any useful marking that would let us find a datasheet or anything so we need to make some assumptions.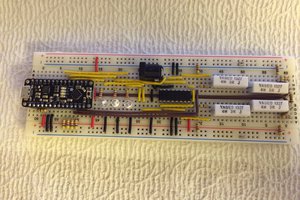
 Les Hall
Les Hall
 matseng
matseng
 ClimbinElectronics
ClimbinElectronics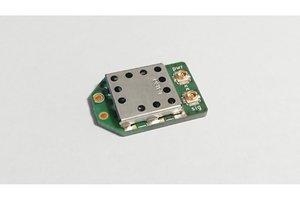
 Christoph
Christoph