 anfroholic
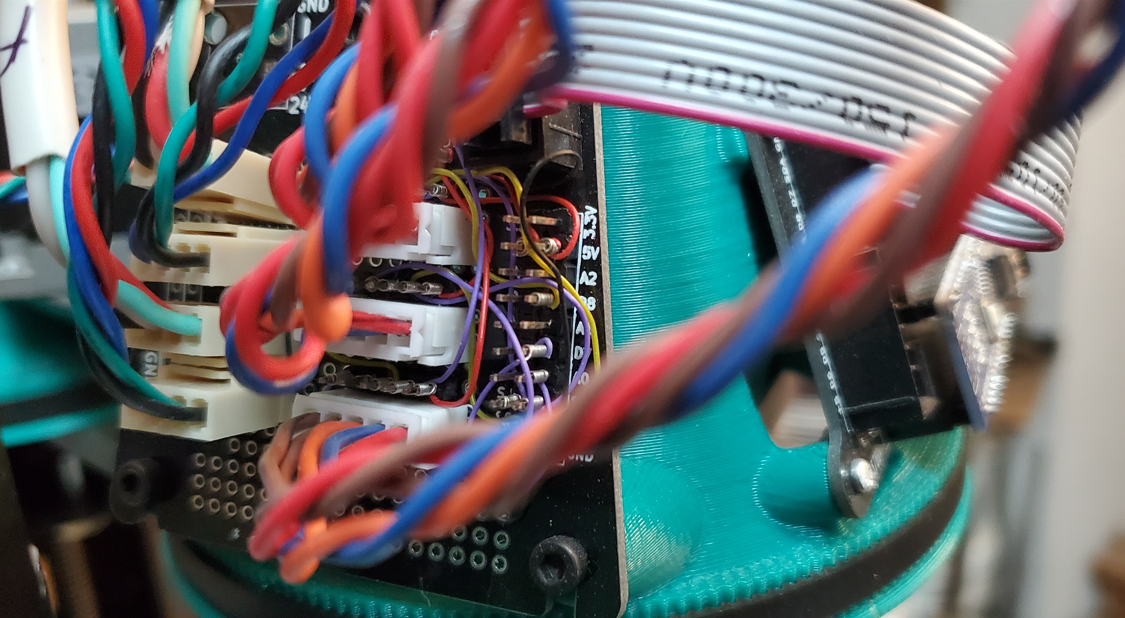
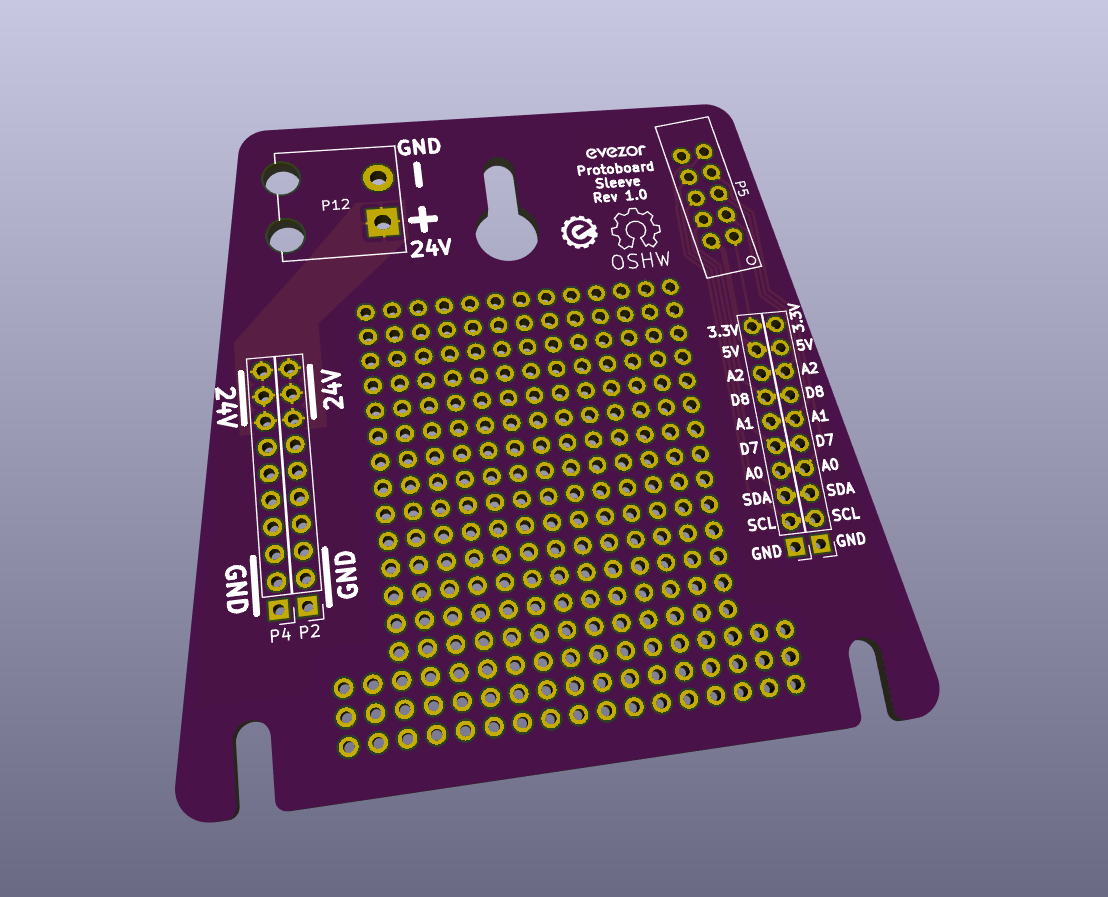
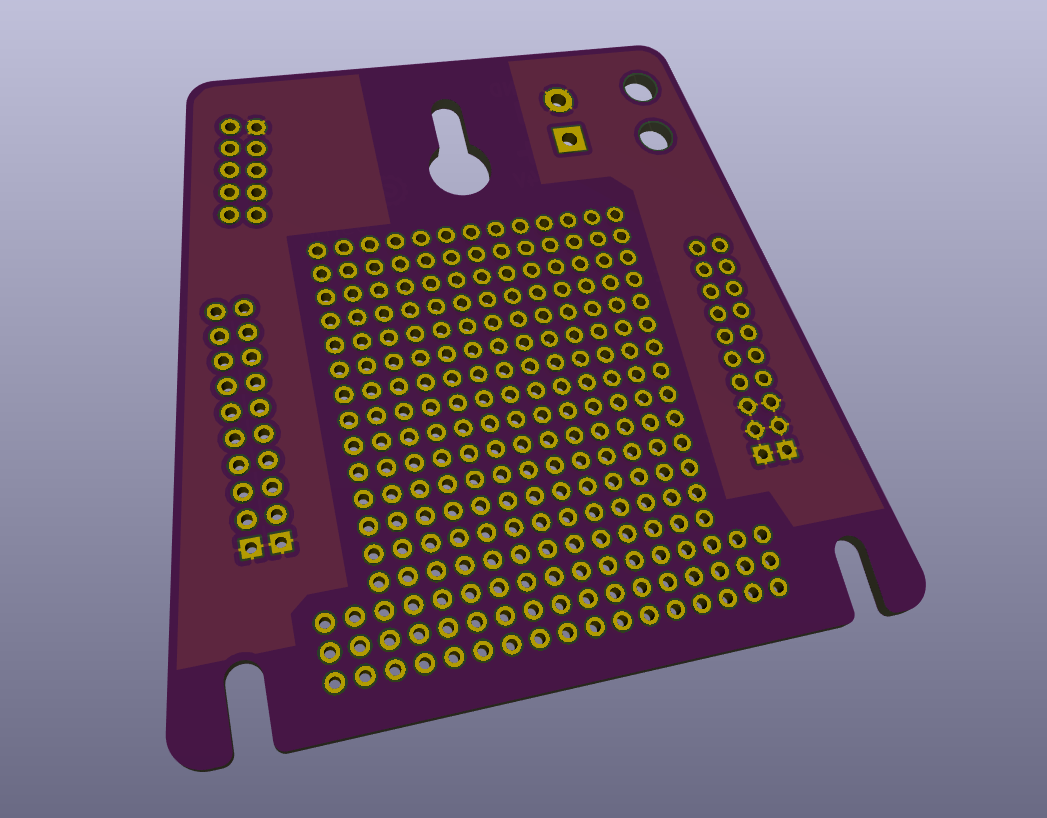
anfroholicThis board was intended to sit at the elbow of the robotic arm and serve as a prototyping area to create new ciruits. It has a 10 pin IDE port to connect gpio to the sleeve controller board, but this avenue was abandoned as there were many issues keeping things simple.
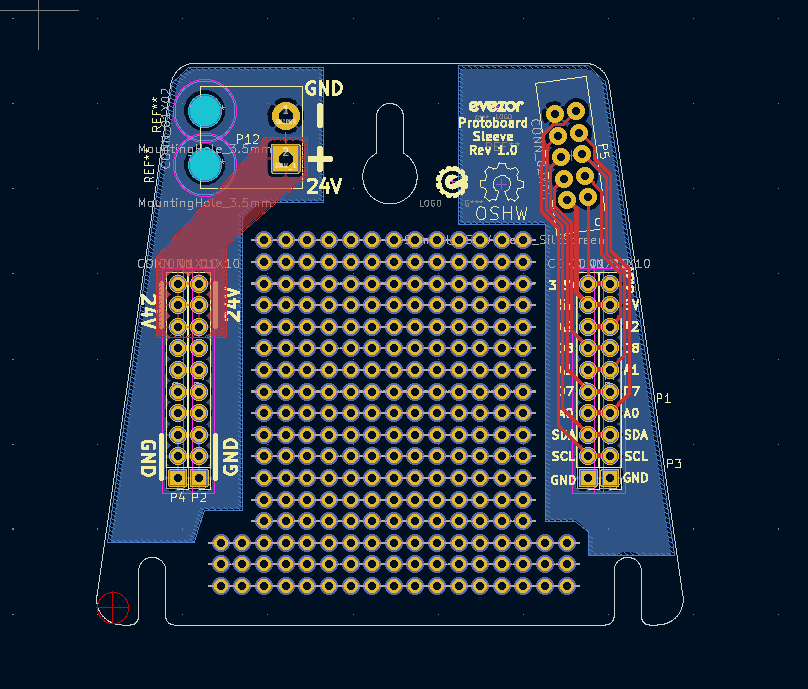
Source files can be found here: https://github.com/evezor/evezor_arm_v1_sleeve_protoboard
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.