 Sergio García Sánchez
Sergio García SánchezPapaya Pathfinder

Papaya Pathfinder is an open-source family of small remote-controlled rovers based on the ESP32.
The project currently includes two rover variants, designed for different sizes, motors, and power requirements.
All mechanical parts of the rovers are fully 3D-printable, and all models are available in the 3d-models/ directories of each rover variant.
The rovers can be operated using either WiFi or ExpressLRS (ELRS), depending on the firmware configuration.
Watch the Papaya Pathfinder demo on YouTube

Papaya Pathfinder
- Controller: ESP32
- Radio: ELRS receiver (required only when running
firmware-elrs) - Motor Drivers: 2× BTS7960 43A (or similar high-current driver)
- Motors: 6× GA25 DC gear motors
- Steering: 4× MS24 servos
- Power: LiPo 3S Battery
- Voltage Regulation:
- 1× UBEC 5V/3A (for ESP32)
- 1× UBEC 6V/8A (High current supply for Servos)
Firmware
The rover supports multiple firmware configurations, each enabling a different communication method.
-
firmware-wifi- WiFi-based control
- HTTP API for movement commands
- Compatible controllers:
- Python desktop controller — sends gamepad-based control commands to the rover via HTTP.
- Android mobile app — enables rover control using a gamepad, providing the same driving experience available on the desktop controller.
-
firmware-elrs- Control via ExpressLRS (ELRS)
3D-Printed Parts
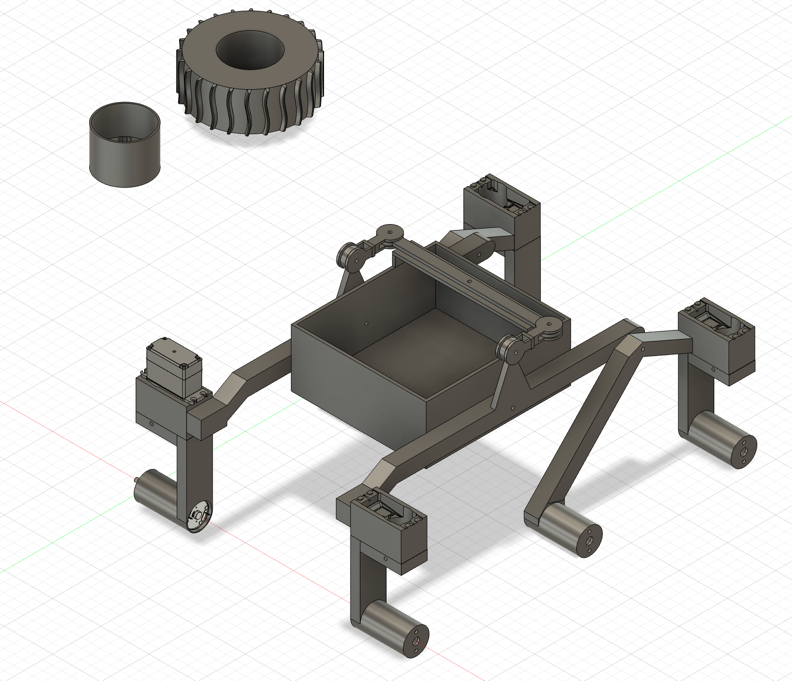
All STL files for this rover are available in: pathfinder/3d-models/
The complete mechanical design is also available in STEP format: pathfinder/cad/papaya-pathfinder.step
Use PETG or PLA for the structural parts, and TPU for the tires. All parts are designed to be assembled using M3 screws and nuts.
| File | Qty | Material | Notes |
|---|---|---|---|
body.stl |
1 | PETG / PLA | Main chassis |
arm_left.stl |
1 | PETG / PLA | Left suspension arm |
arm_right.stl |
1 | PETG / PLA | Right suspension arm |
pivot_left.stl |
1 | PETG / PLA | Left pivot mount |
pivot_right.stl |
1 | PETG / PLA | Right pivot mount |
differential_bar.stl |
1 | PETG / PLA | Central rocker-bogie differential bar |
differential_link_left.stl |
1 | PETG / PLA | Left link between differential bar and suspension arm |
differential_link_right.stl |
1 | PETG / PLA | Right link between differential bar and suspension arm |
motor_mount.stl |
4 | PETG / PLA | Motor mounts for GA25 motors used on steering arms |
horn_adapter.stl |
4 | PETG / PLA | Servo horn adapters for steering servos. Print horizontally for strength. |
rim.stl |
6 | PETG / PLA | Standard option. Connects directly to the motor shaft (D-shape). Simple, but can strip over time under high torque. |
rim_hexagonal.stl |
6 | PETG / PLA | Pro option (Recommended). Requires 12mm brass hex adapters. Much stronger connection, prevents the motor shaft from stripping the plastic. |
tire.stl |
6 | TPU | Tires |
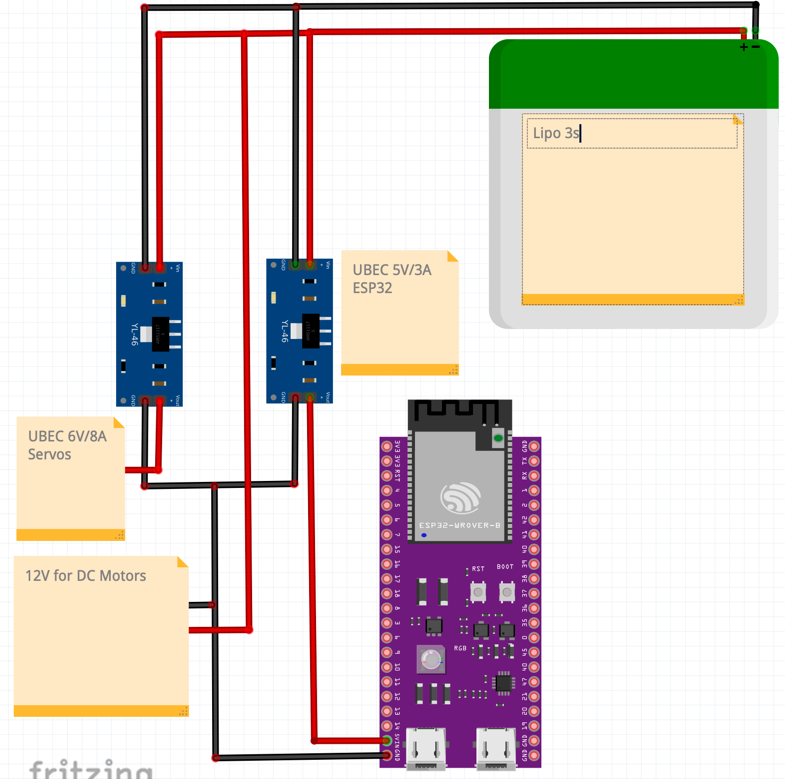
Wiring Diagram
-
Power Distribution: Shows the rover power distribution, including the LiPo 3S battery,
separate UBECs for logic (5V) and servos (6V), and the motor power rails.
![Papaya Pathfinder power distribution]()
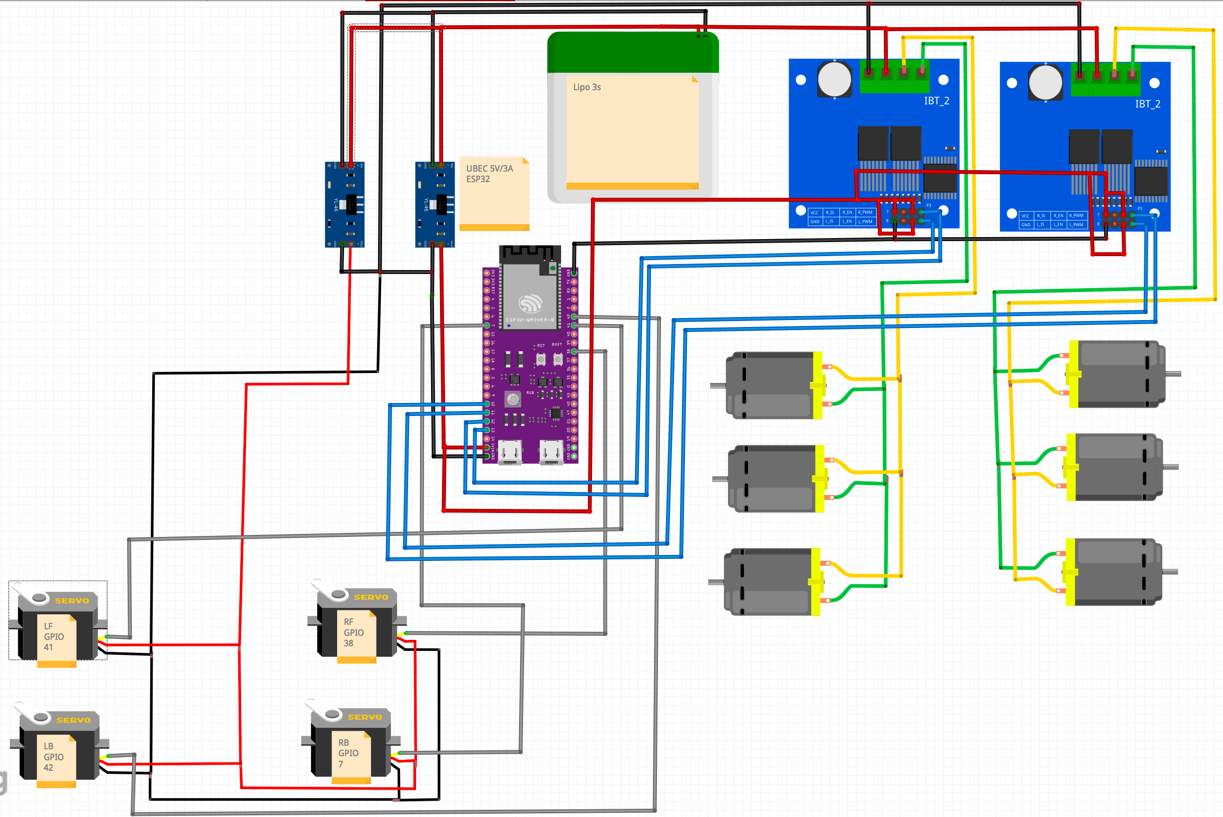
-
Motors: Motor wiring using two BTS7960 drivers, each controlling one side of the rover.
The ESP32 provides PWM control signals to each driver.
![Papaya Pathfinder motors]()
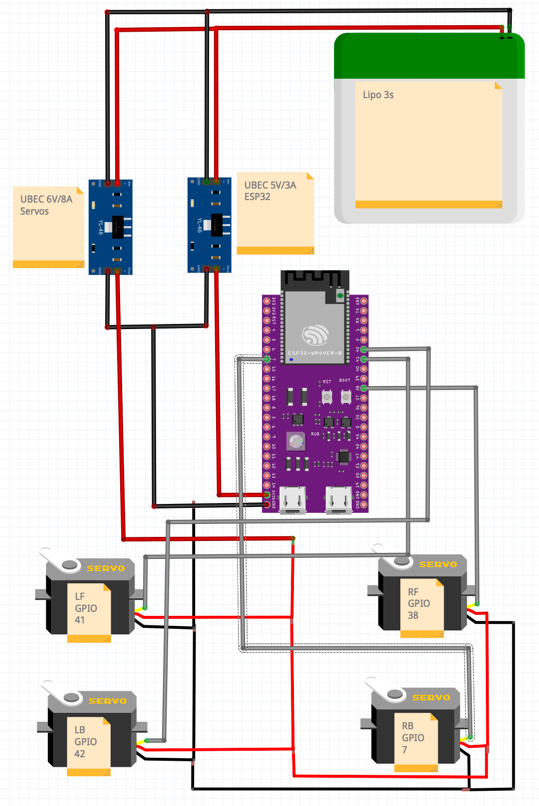
-
Servos: Servo wiring powered by a dedicated 6V UBEC. PWM control signals are provided by the ESP32.
![Papaya Pathfinder servos]()
-
System Overview: High-level overview of the complete rover wiring, combining power,
motor drivers, servos and control logic.
![Papaya Pathfinder overview]()

Papaya Pathfinder Mini
- ESP32 with camera (ESP32-CAM / ESP32-S3-CAM) (required only when running
firmware-wifi) - ELRS receiver (required only when running
firmware-elrs) - 6× N20 DC gear motors
- Power supply: LiPo 2S
- Voltage regulation:
- 1× DC-DC step-down to 5V (ESP32 / ESP32-CAM)
- 1× DC-DC step-down to 6V (N20 motors)
Firmware
The rover supports multiple firmware configurations, each enabling a different communication method.
-
firmware-wifi- WiFi-based control
- HTTP...
 JohnsonFarms.us
JohnsonFarms.us
 aeropic
aeropic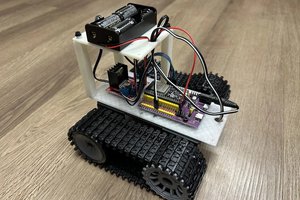
 siddharth.c
siddharth.c