Kai Tung Yu
Kai Tung YuOpen-Source and Reproducible Hardware Design
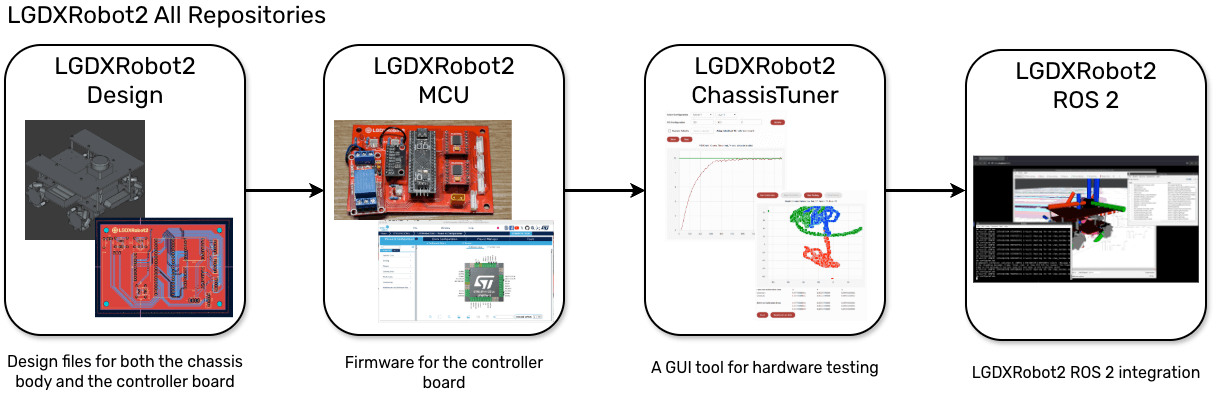
LGDXRobot2 provides open-source designs for the chassis body, controller board circuit, and software source code. It includes both the design files and manufacturing files which is ready for reproduction.
GUI Hardware Testing Tool
ChassisTuner is a GUI tool specifically designed for LGDXRobot2. It includes hardware testing, PID tuning, and IMU calibration with real-time visualisation.
ROS 2 Support
LGDXRobot2 fully supports ROS 2. It is not just a ROS node that connects to the hardware. It also includes a URDF model for RViz visualisation, remote control via the joy node, navigation with Nav2, and simulation in Webots.
The packages include launch files to run Nav2 examples and support switching between pre-tuned parameters to test different configurations.
Easy Installation
The LGDXRobot2 ROS 2 packages are easy to install via APT on Ubuntu. It also has ready-to-use Docker images with a remote web interface. These installation options support both AMD64 and ARM64 computers. With CI/CD pipeline support, the packages are always kept up to date.
Demonstration Videos
Repositories
LGDXRobot2 is distributed across several Git repositories. The project is released under the MIT Licence, except for ChassisTuner, which is released under GPLv3.
- LGDXRobot2 Design: https://github.com/yukaitung/lgdxrobot2-design
- LGDXRobot2 MCU: https://github.com/yukaitung/lgdxrobot2-mcu
- LGDXRobot2 ChassisTuner: https://github.com/yukaitung/lgdxrobot2-chassistuner
- LGDXRobot2 ROS2: https://github.com/yukaitung/lgdxrobot2-ros2