Arnov Sharma
Arnov Sharma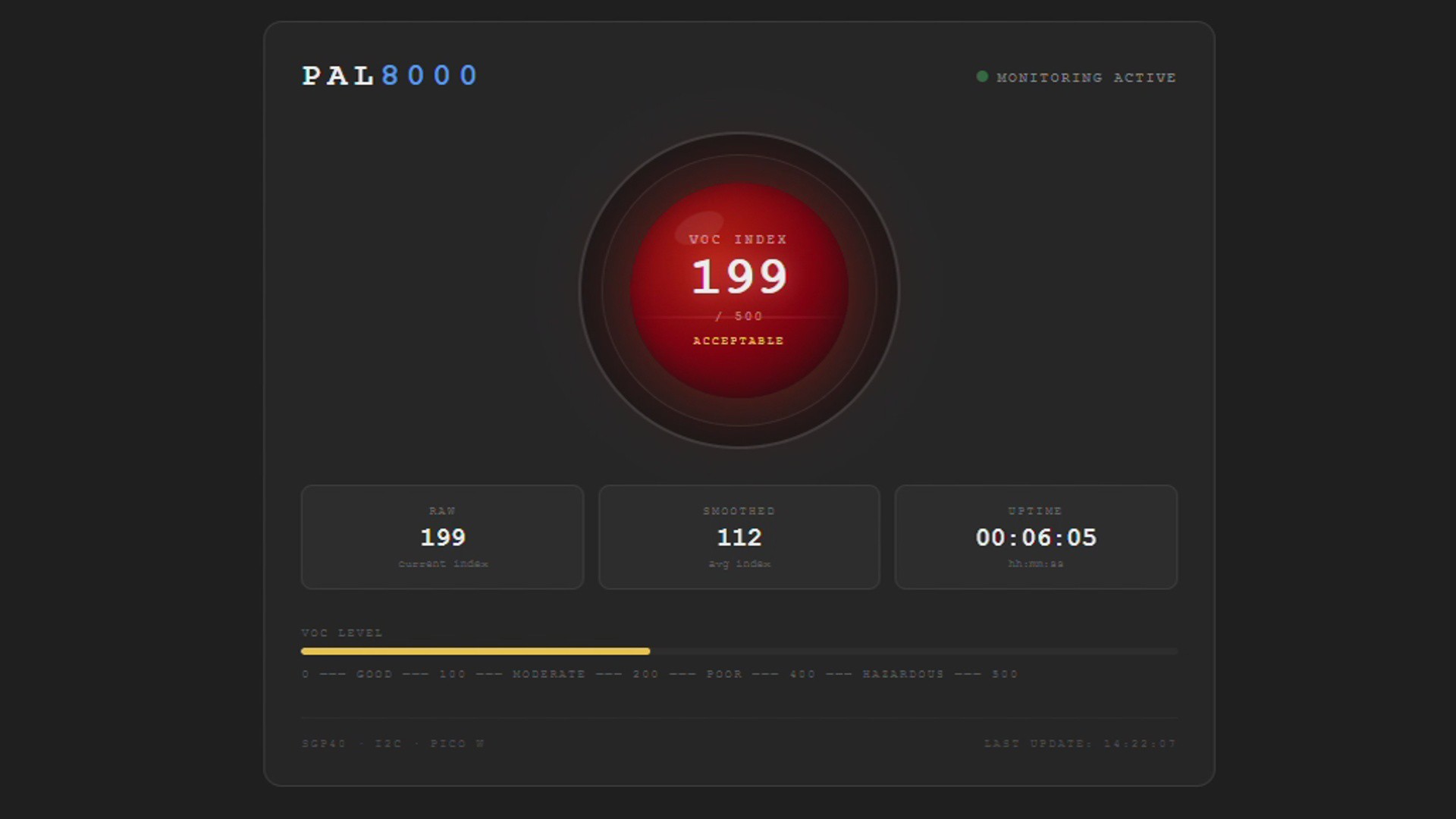

One approach was to build an actual AI model, train it on TVOC readings, and have it classify good or bad air quality intelligently. That could work, but it was tedious, and honestly, I'm a lazy guy.
So I went with the simpler route: a Raspberry Pi Pico 2 paired with a DFRobot DFPlayer Mini module, which plays audio files stored on a microSD card.
These are pre-recorded clips that I made myself using Elevenlabs, One of these clips is an introduction clip that responds like, "I'm PAL 8000, your environmental monitoring system." I have also added a few audio clips that respond to increasing VOC Levels that say "Warning, air quality has degraded" and a few eerie lines like "I'm watching" to give it that sinister HAL 9000 personality.
The logic is straightforward: on startup, PAL 8000 plays an introduction clip. It then continuously reads the VOC index from the sensor. If the reading falls between 0 and 100, it plays the "clean air" clip; as readings rise, it switches to progressively more urgent clips. So it behaves like an AI, but it is completely artificial, and definitely not intelligent.
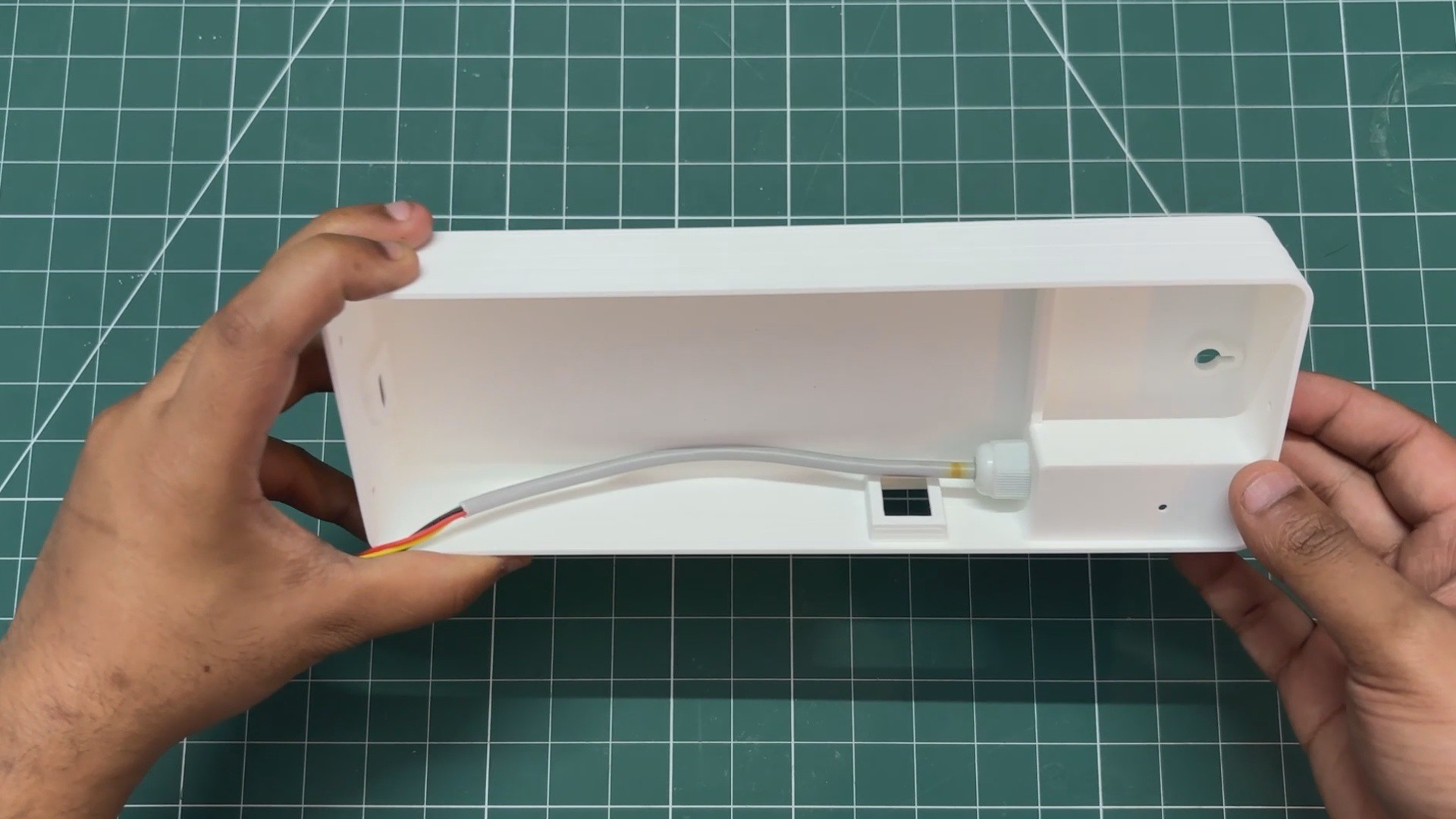
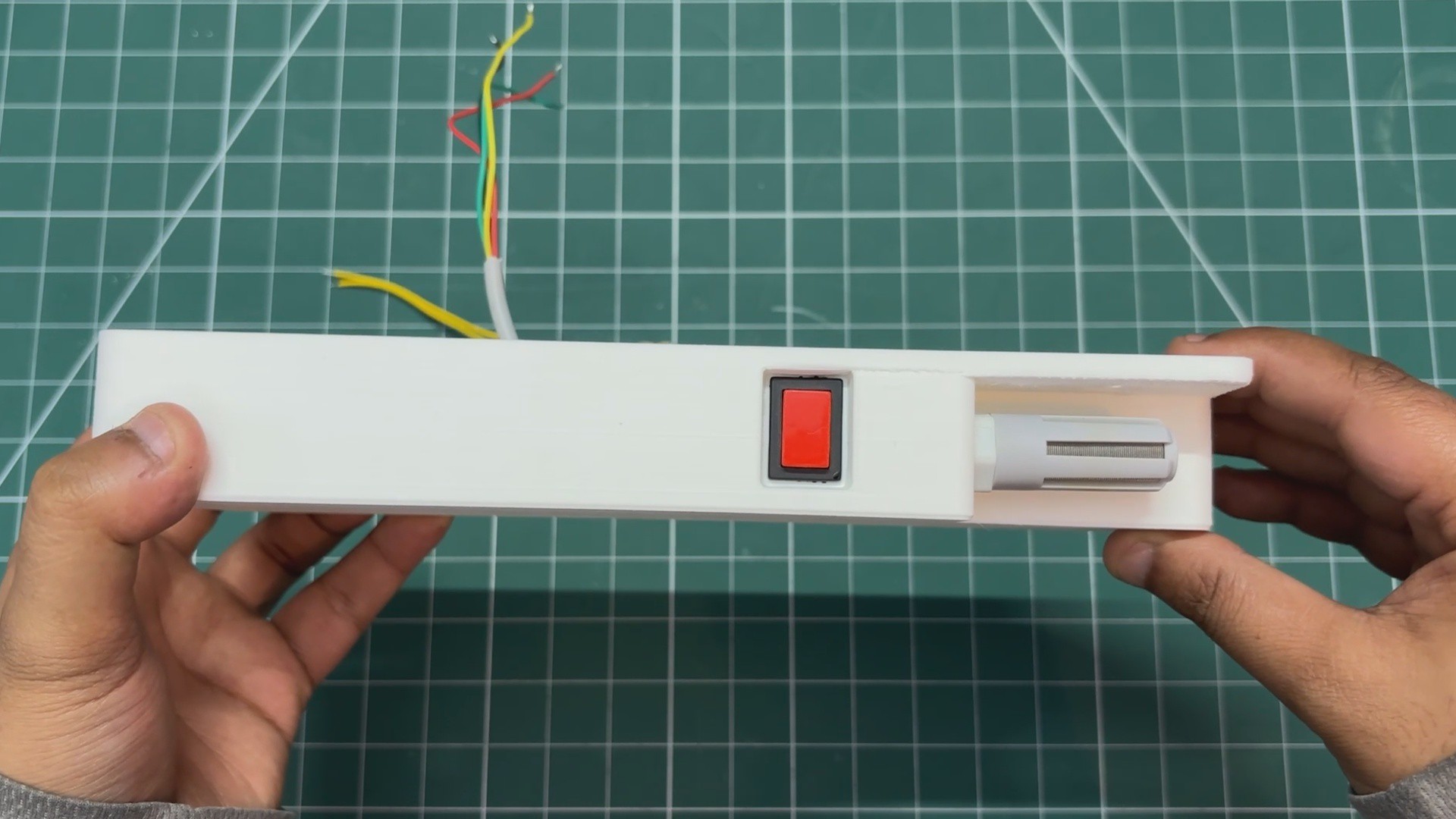
For air quality sensing, I used the Sensirion SGP40, a dedicated indoor VOC (Volatile Organic Compound) sensor. It outputs a VOC index, a value from 0 to 500, where lower is cleaner air. The sensor communicates over I2C and is mounted on the back of the PAL 8000 enclosure.
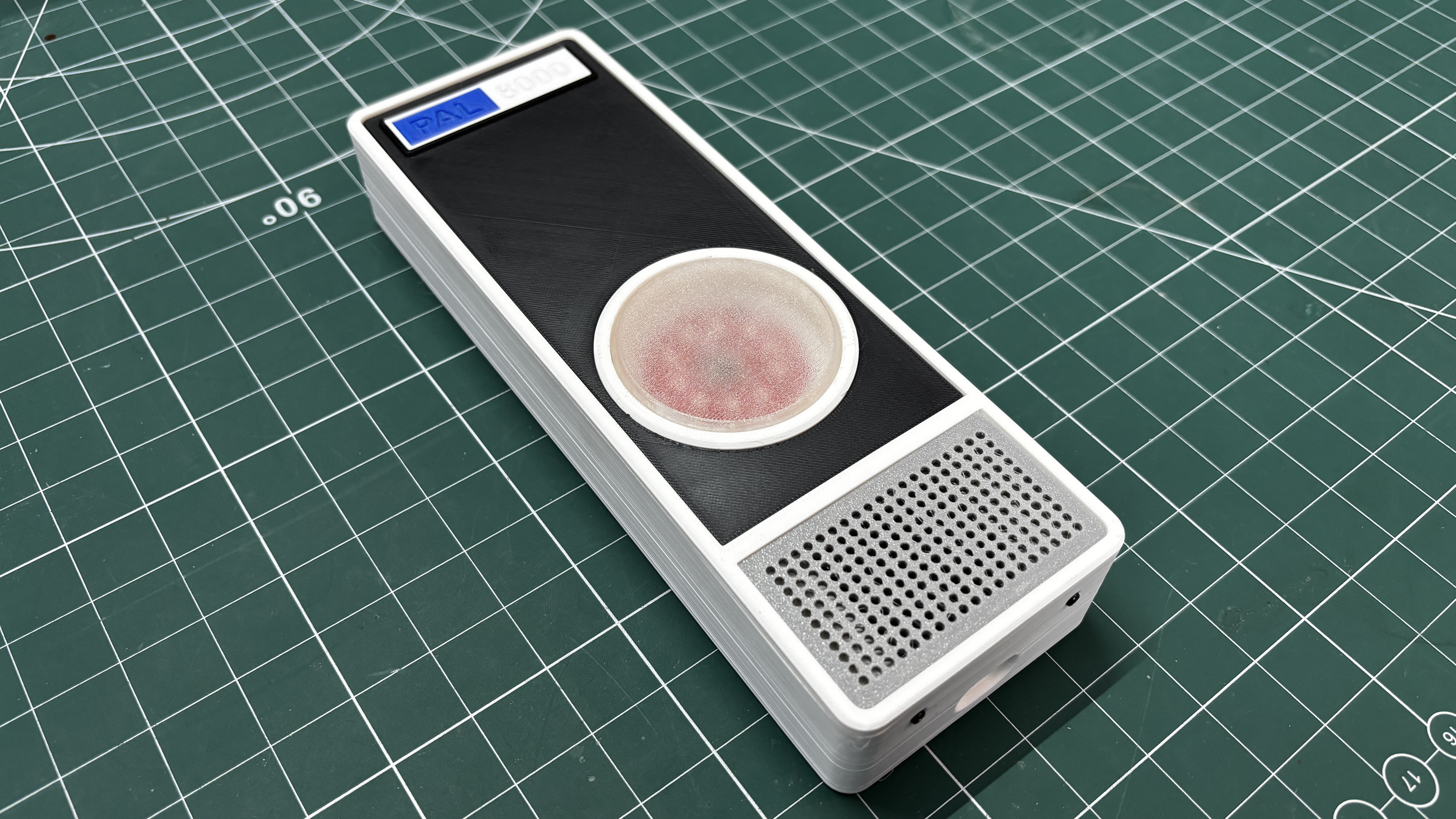
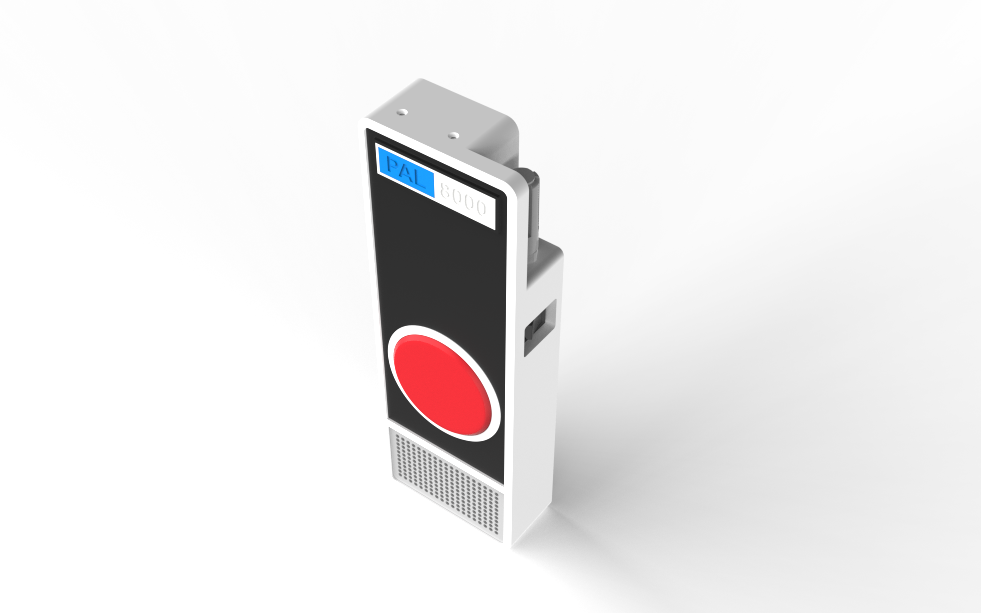
I also designed an enclosure that closely resembles HAL 9000's iconic circular eye design. Mine differs in one way: HAL's enclosure was metallic silver, while mine is white.
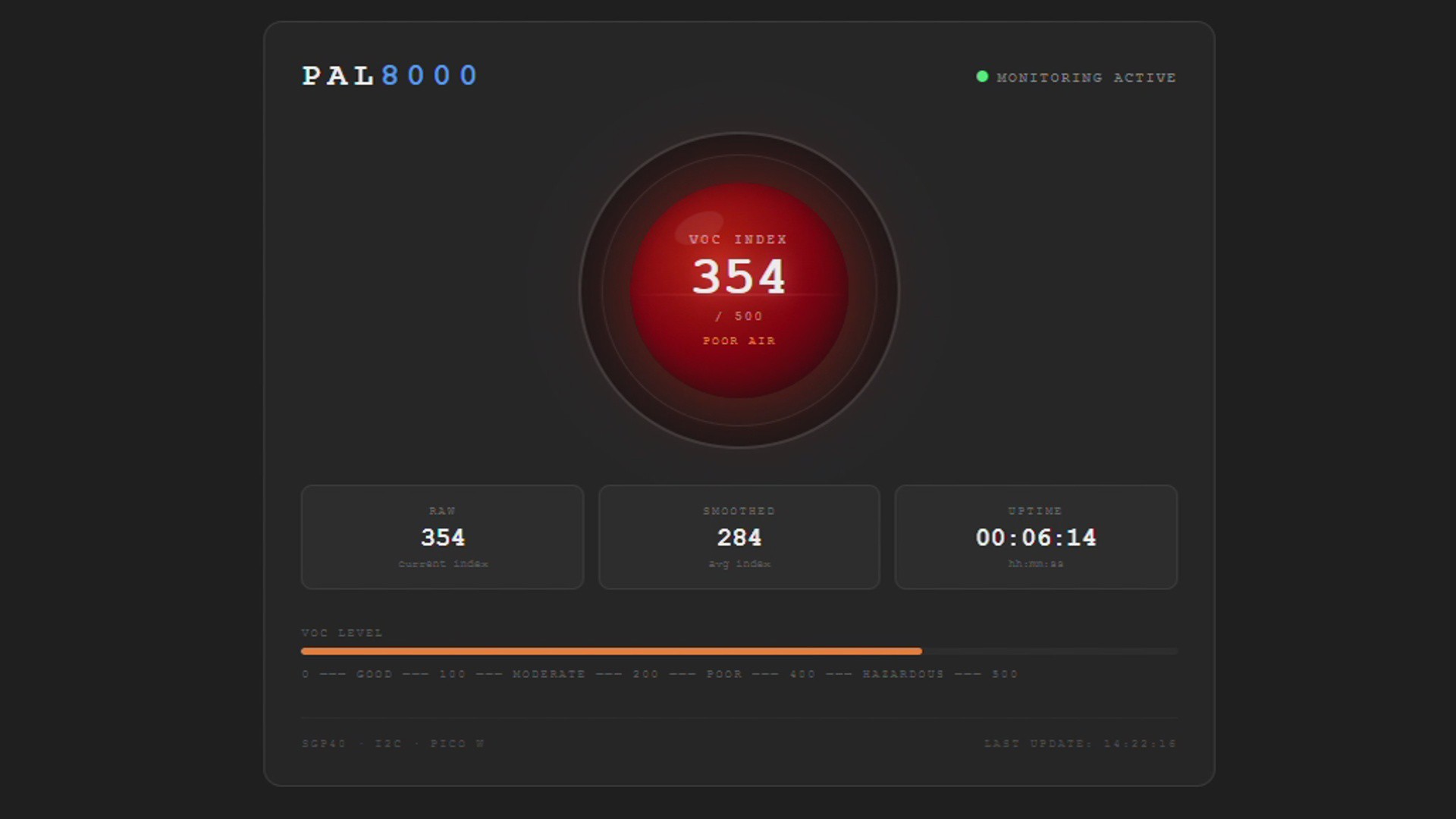
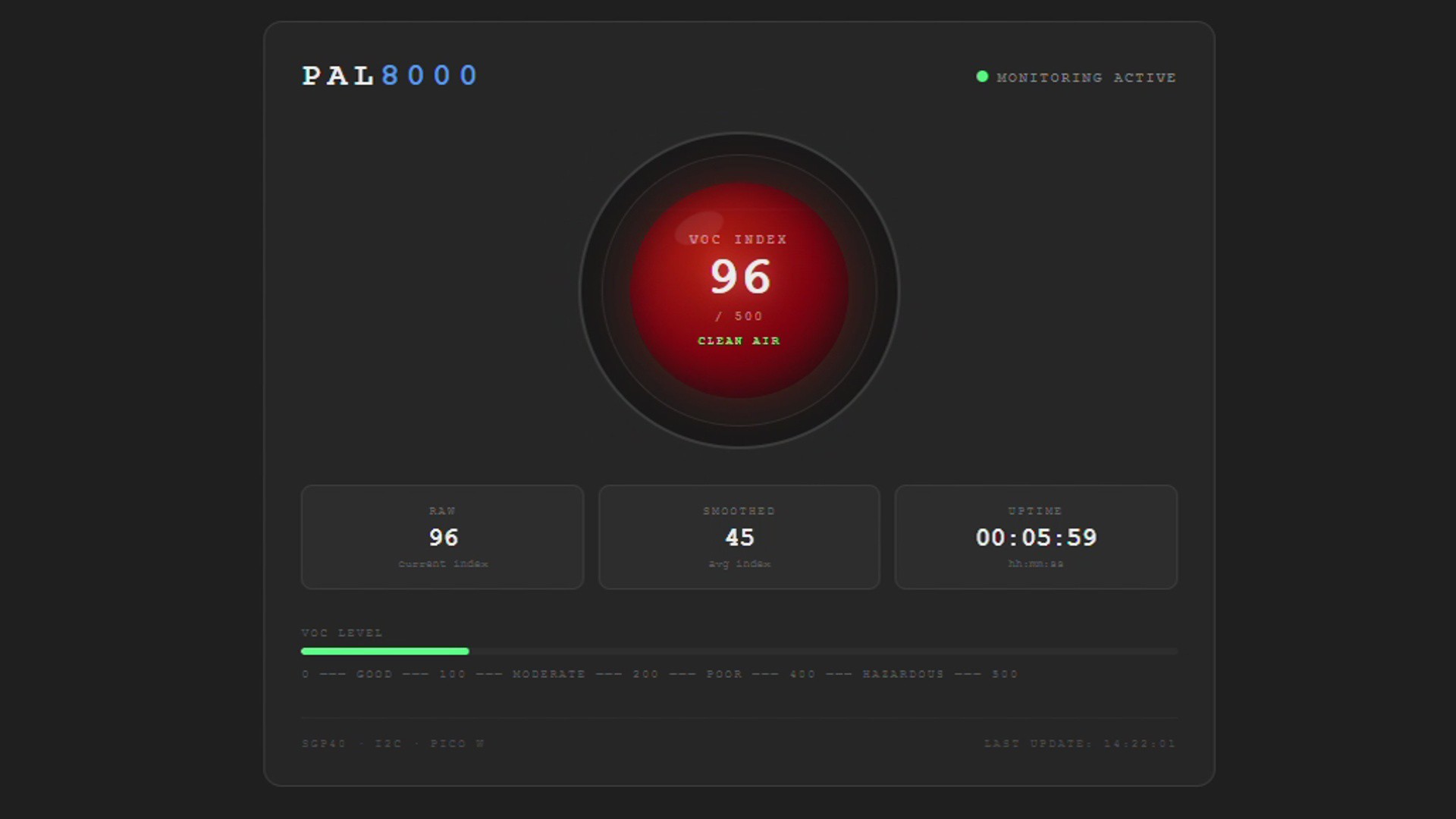
Because we are using a Raspberry Pi Pico W, real-time VOC data can be accessed through a locally hosted web app, letting you monitor your room's air quality directly from a browser on any device on the same network.
This article covers the entire build process from start to finish, so let's get started.
CONCEPT
As stated earlier, the whole idea behind this project came after rewatching 2001: A Space Odyssey, combined with the fact that I was already working on an air quality project. I thought, why not build a HAL 9000-like device that looks and sounds like him while also providing real feedback on air quality?
For those who don't know, HAL 9000 is an artificial intelligence and the onboard computer of the spaceship Discovery One in 2001: A Space Odyssey. He is the hidden main antagonist of the film. HAL is capable of many functions—speech, speech recognition, facial recognition, lip-reading, interpreting and expressing emotions, and even playing chess, all while maintaining every system aboard Discovery. HAL speaks in a soothing male voice, always calm, always measured, which somehow makes him sound even more unsettling.
My goal with PAL 8000 is to recreate that eerie, eerily calm feeling, not a direct copy but something that carries the same atmosphere.
Using a Raspberry Pi Pico 2 paired with a DFPlayer Mini module, along with audio clips I generated using ElevenLabs, I built PAL 8000 around a Sensirion SGP40 indoor air quality sensor. The SGP40 continuously measures VOC (Volatile Organic Compound) levels in the room and outputs a VOC Index value ranging from 0 to 500. Based on where that reading falls, PAL 8000 plays a corresponding audio clip; if the reading is between 0 and 100, it plays a clip indicating clean air; as readings climb higher, the responses become progressively more urgent, shifting from gentle observations to quiet warnings, all delivered in that same unsettling calm tone.
DESIGN
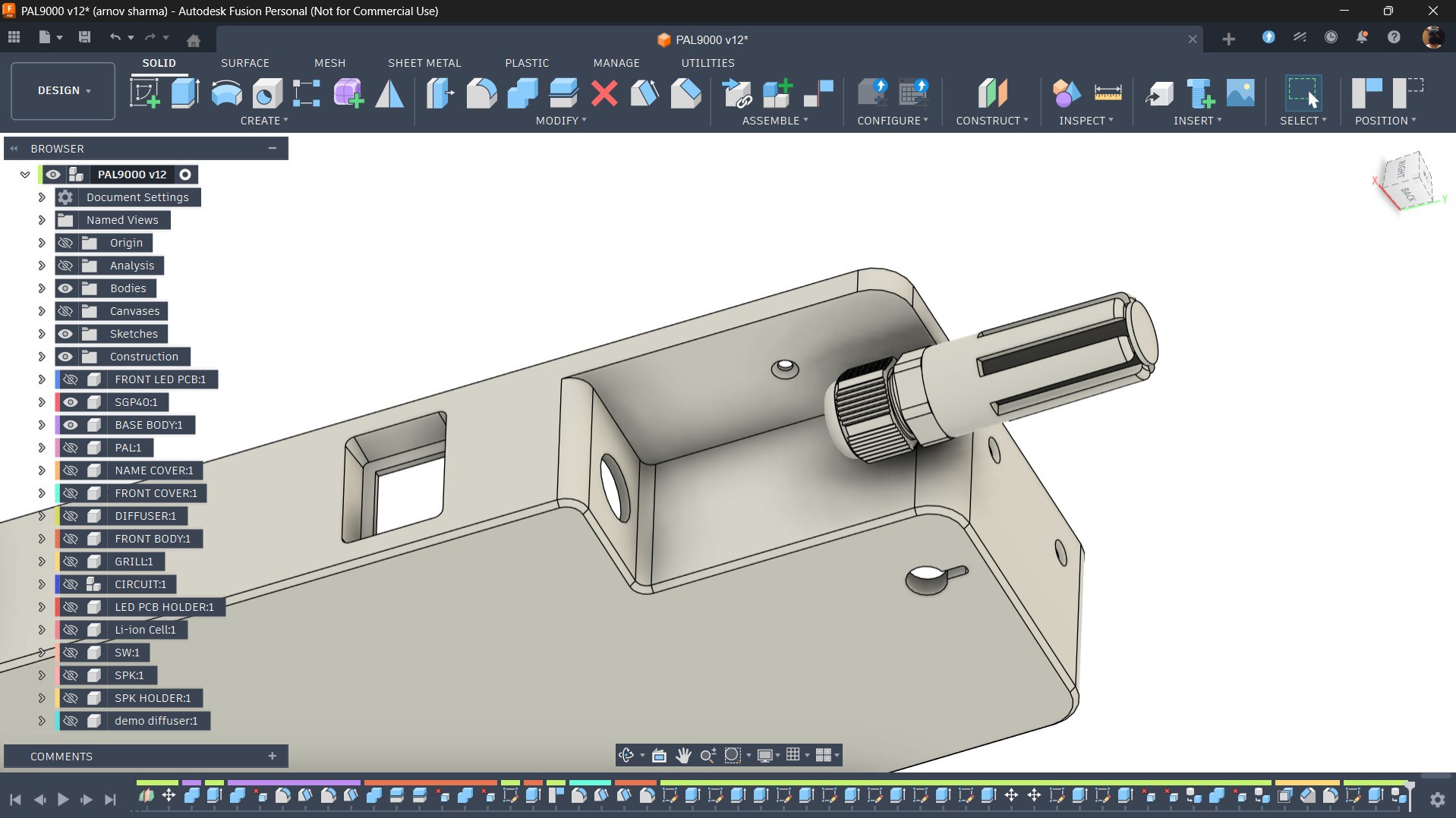
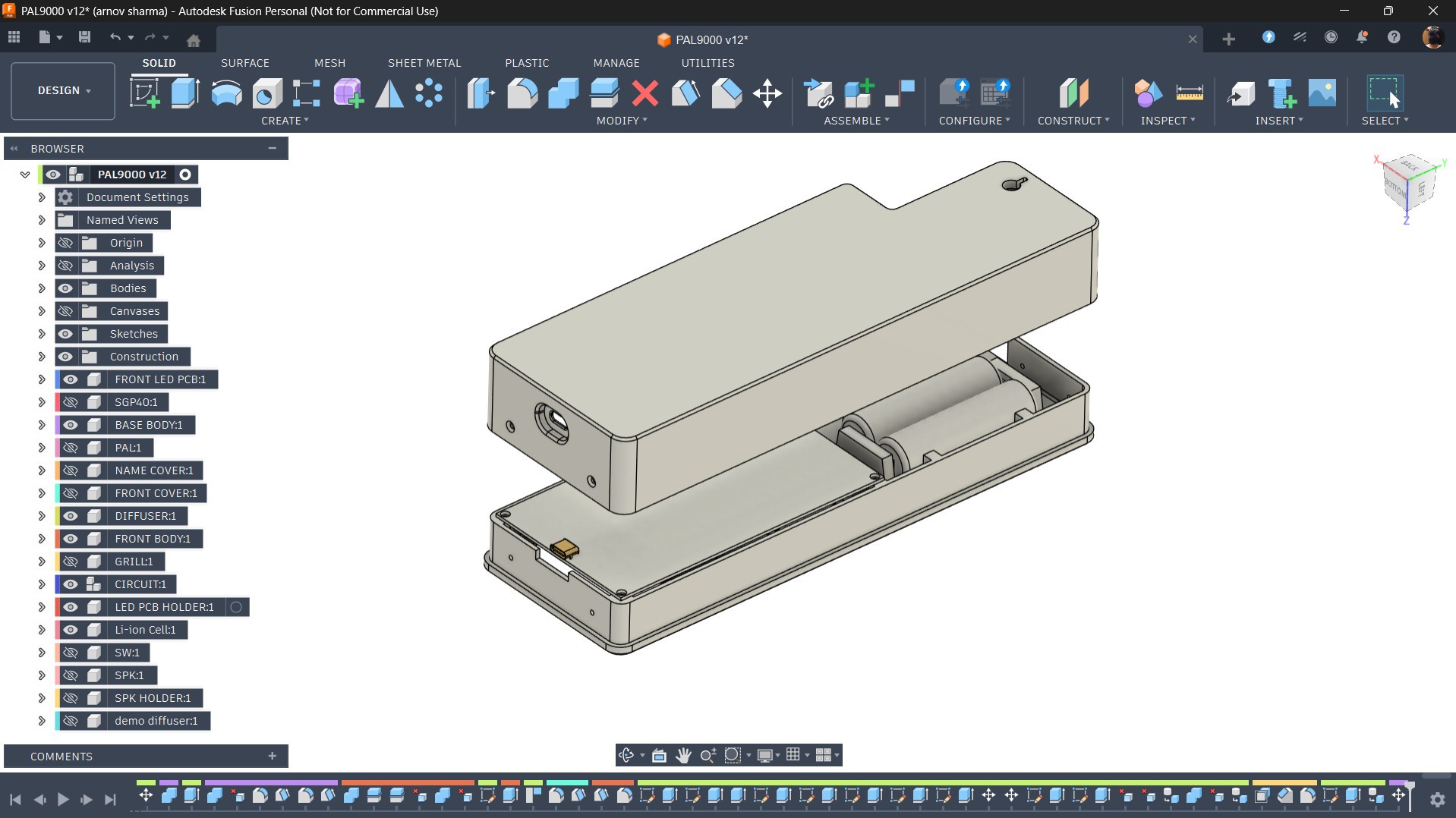
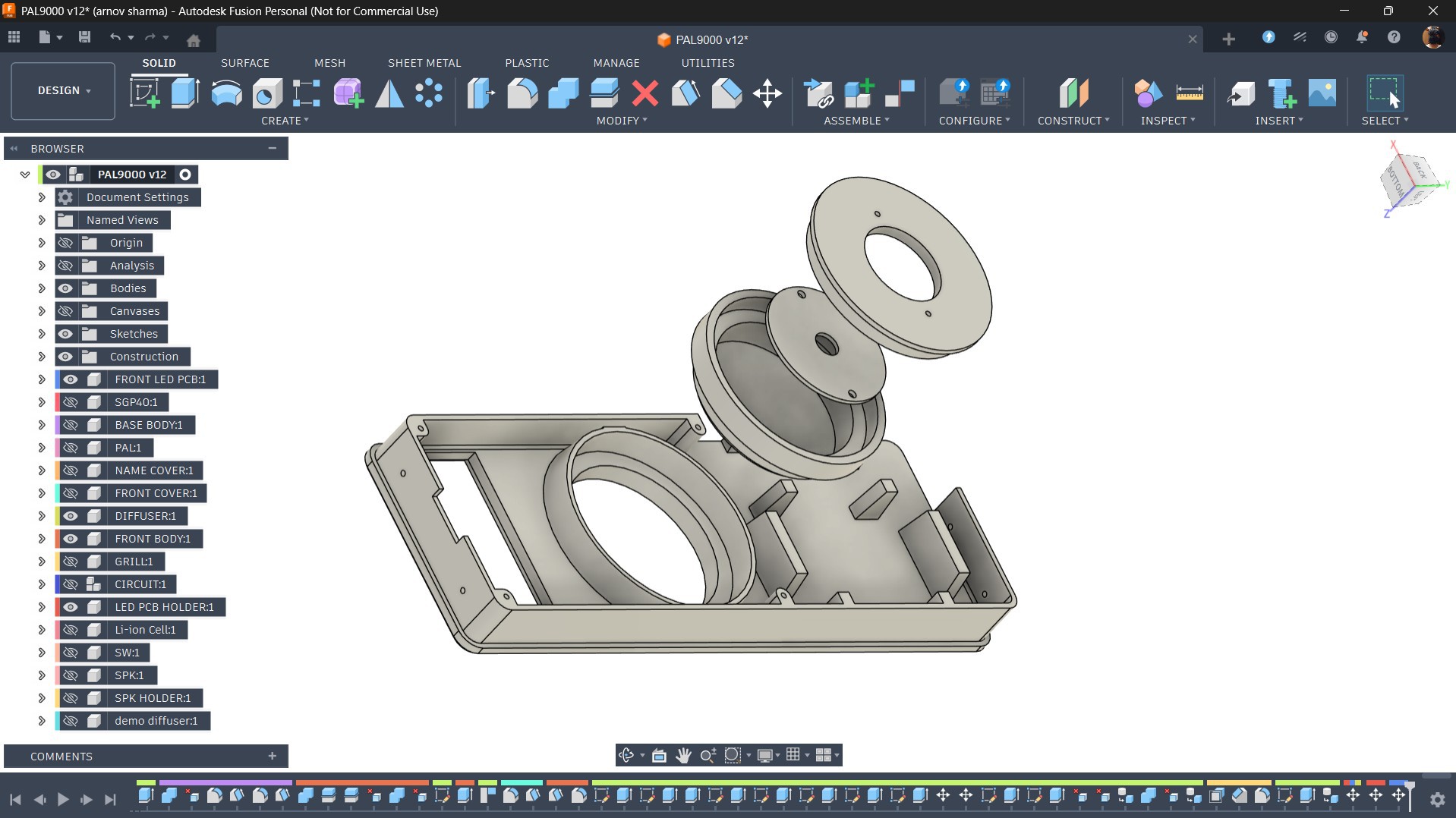
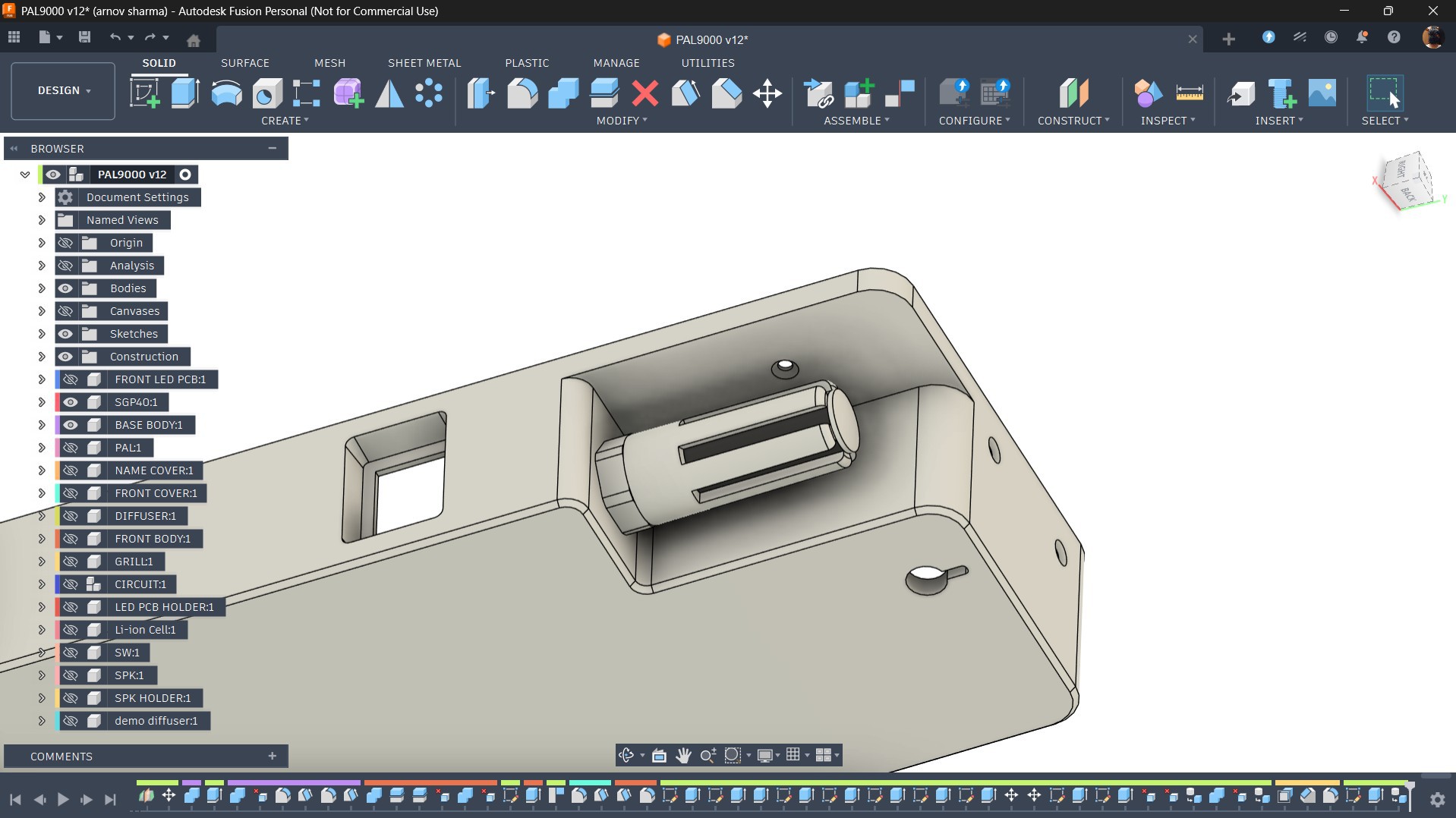
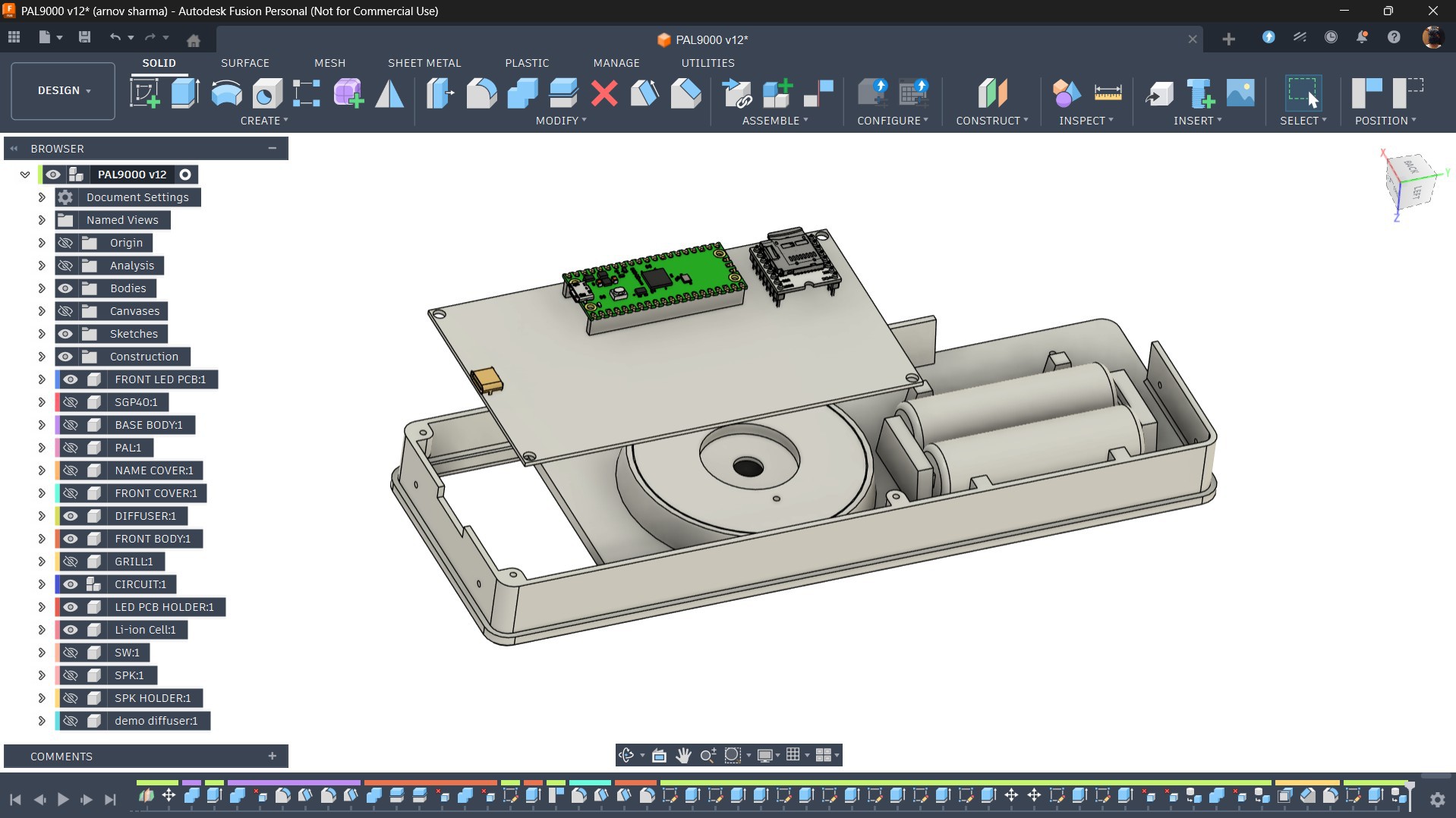
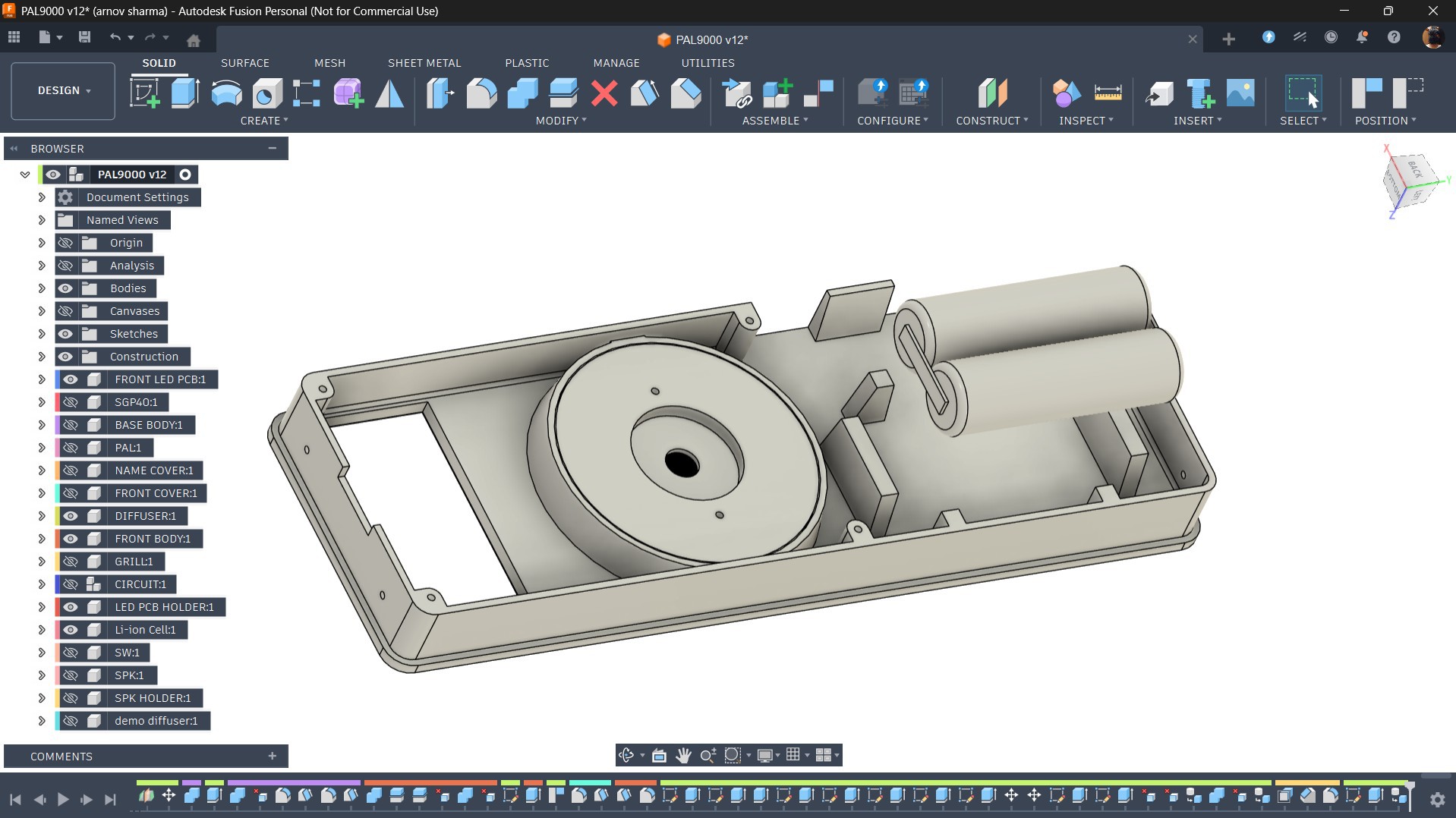
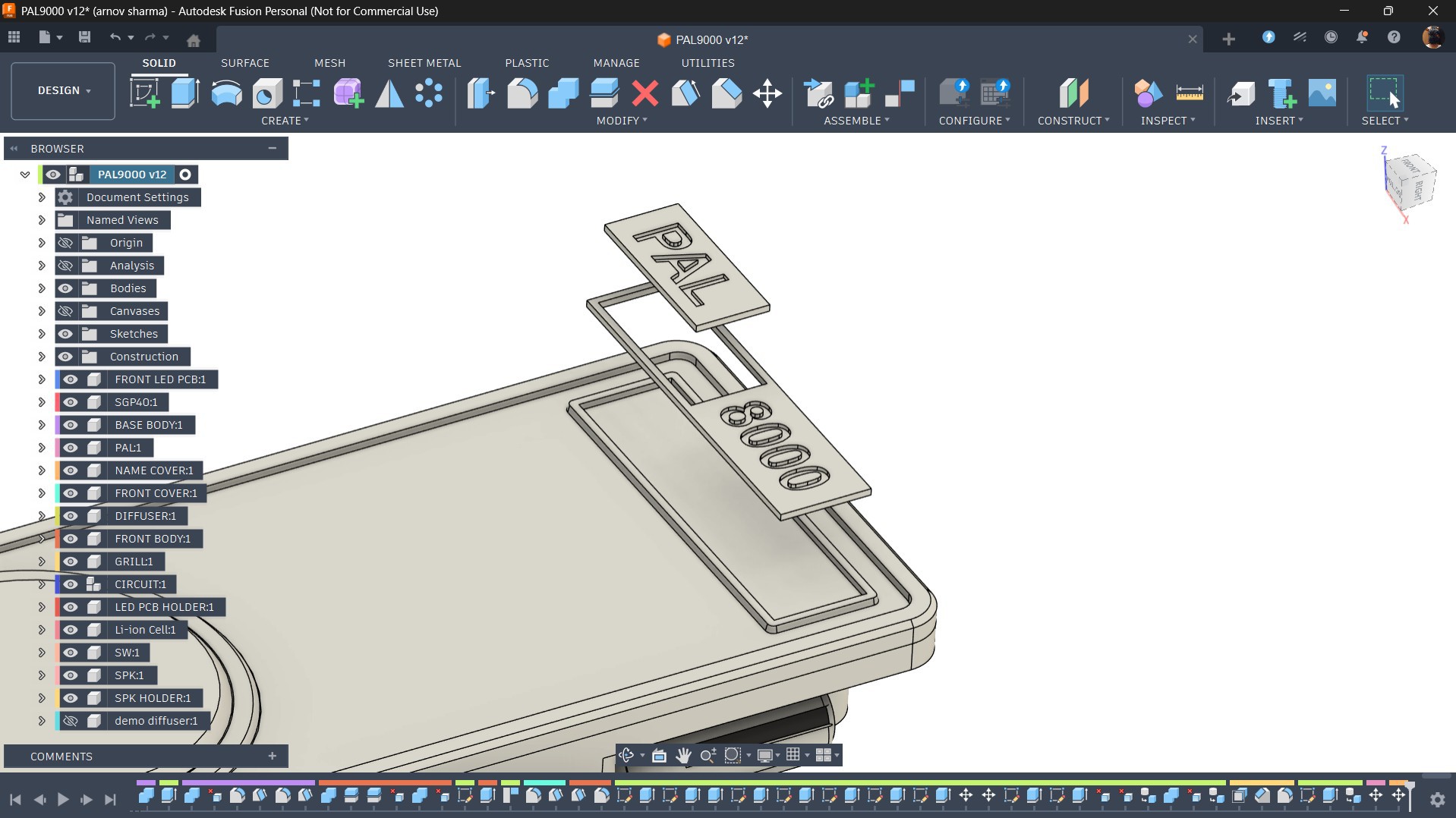
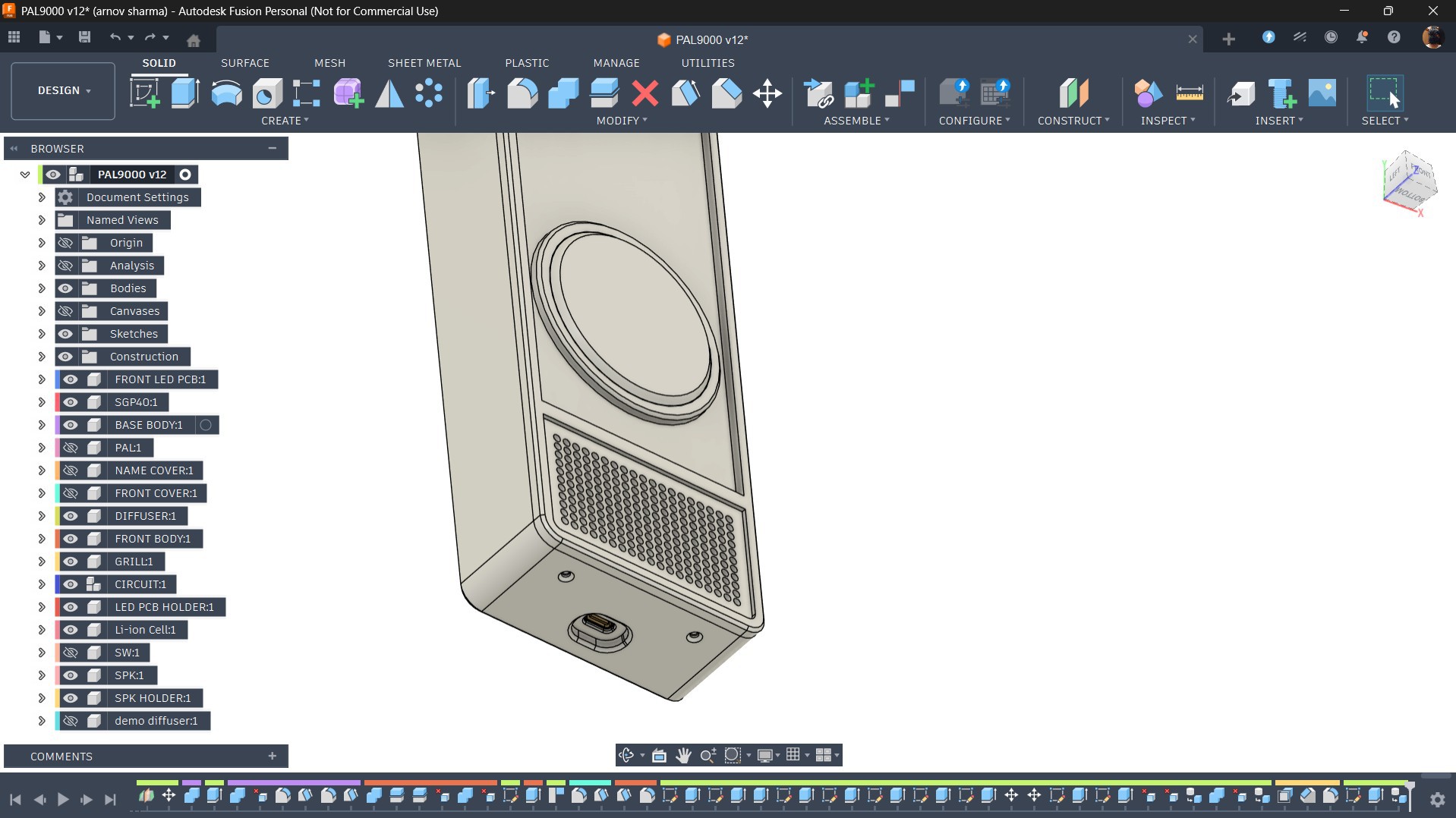
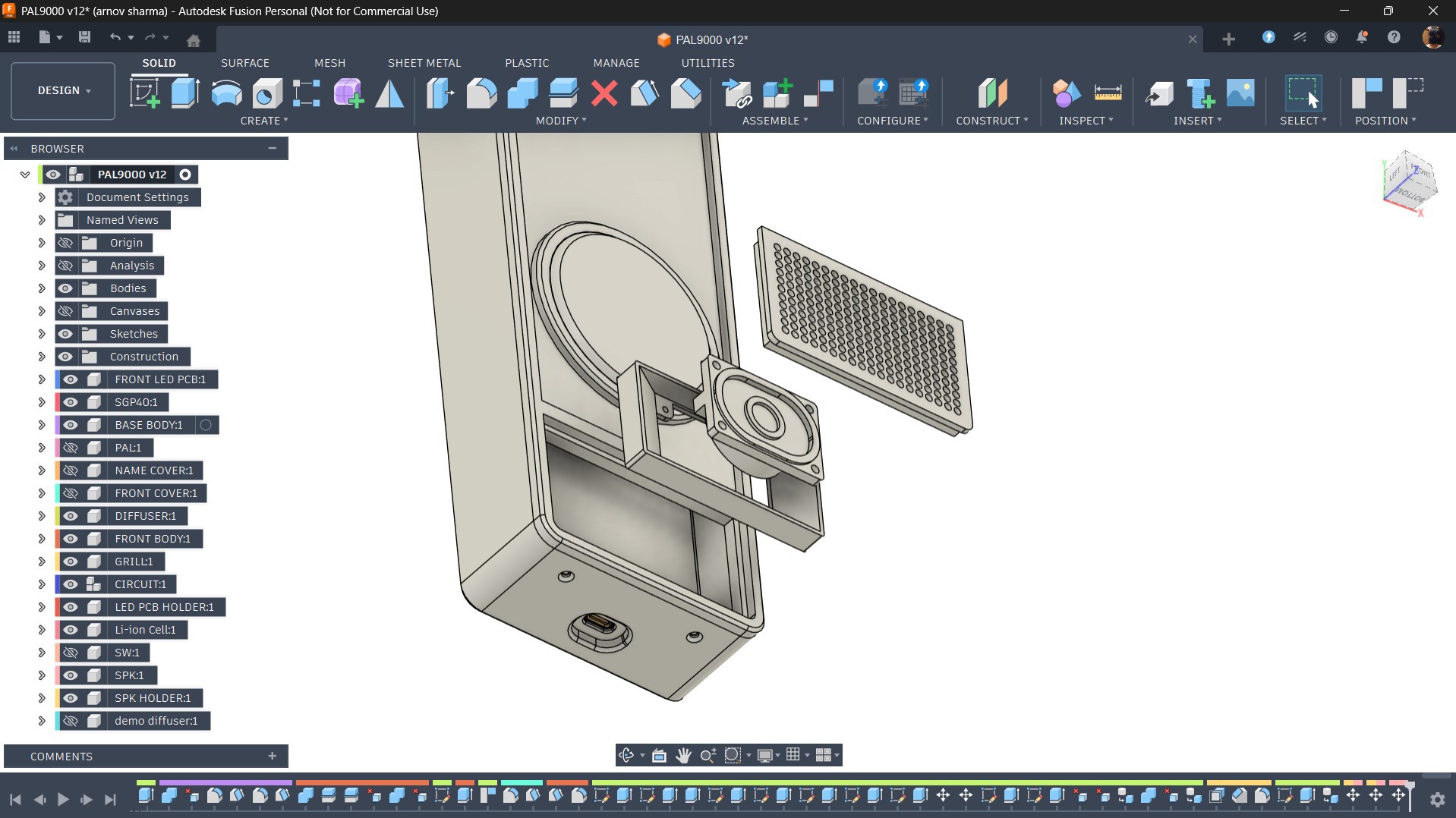
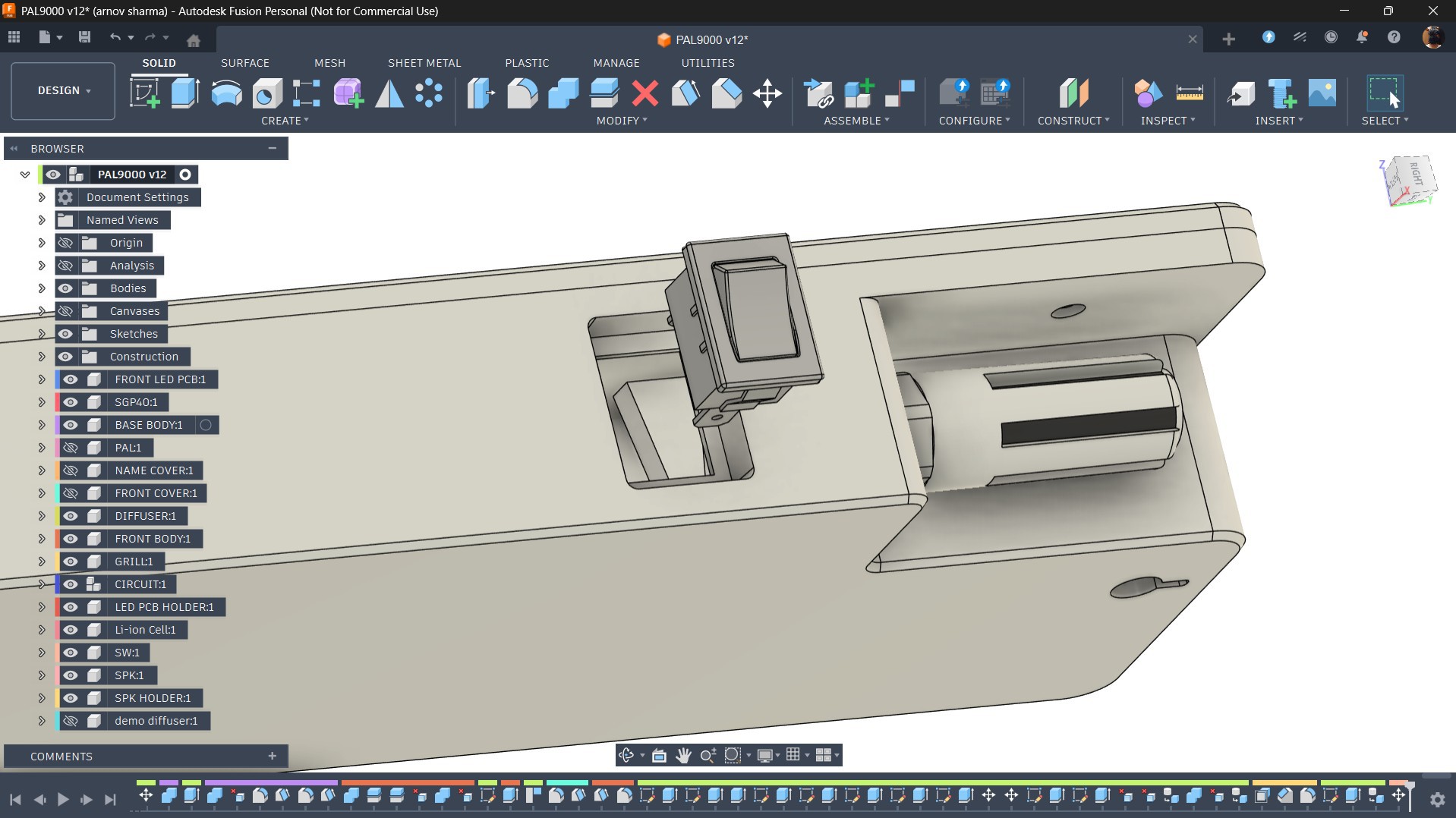
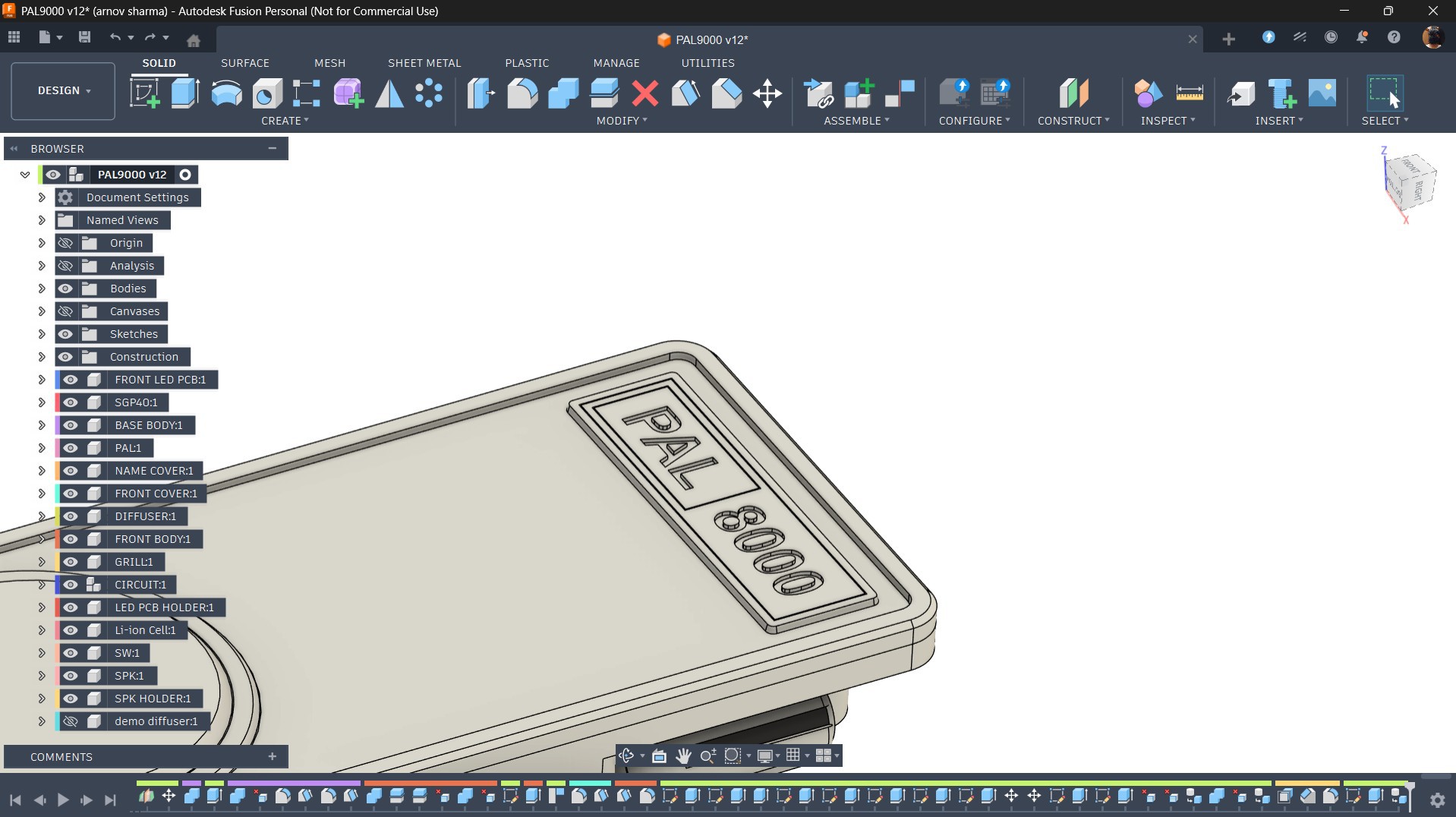
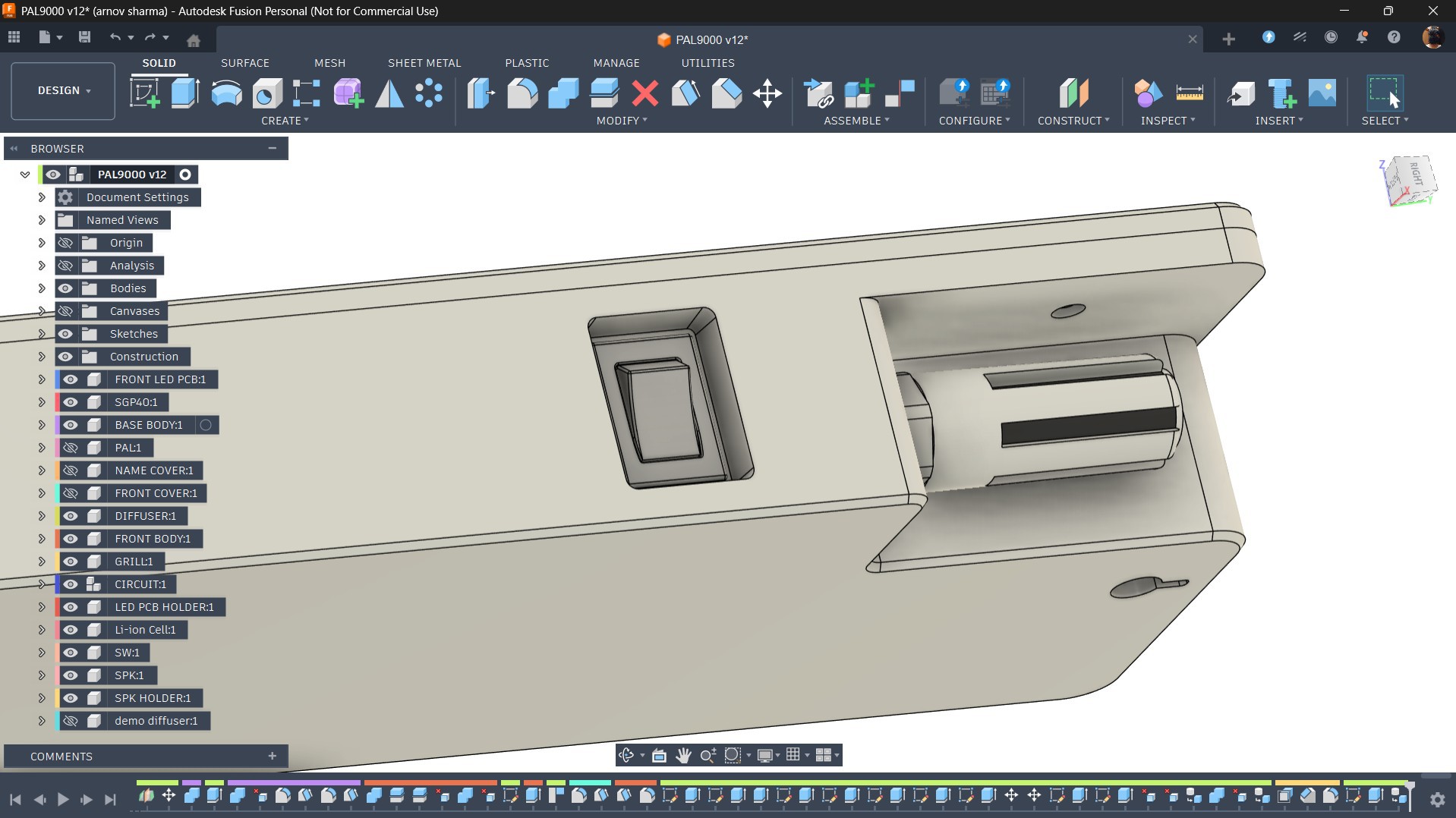
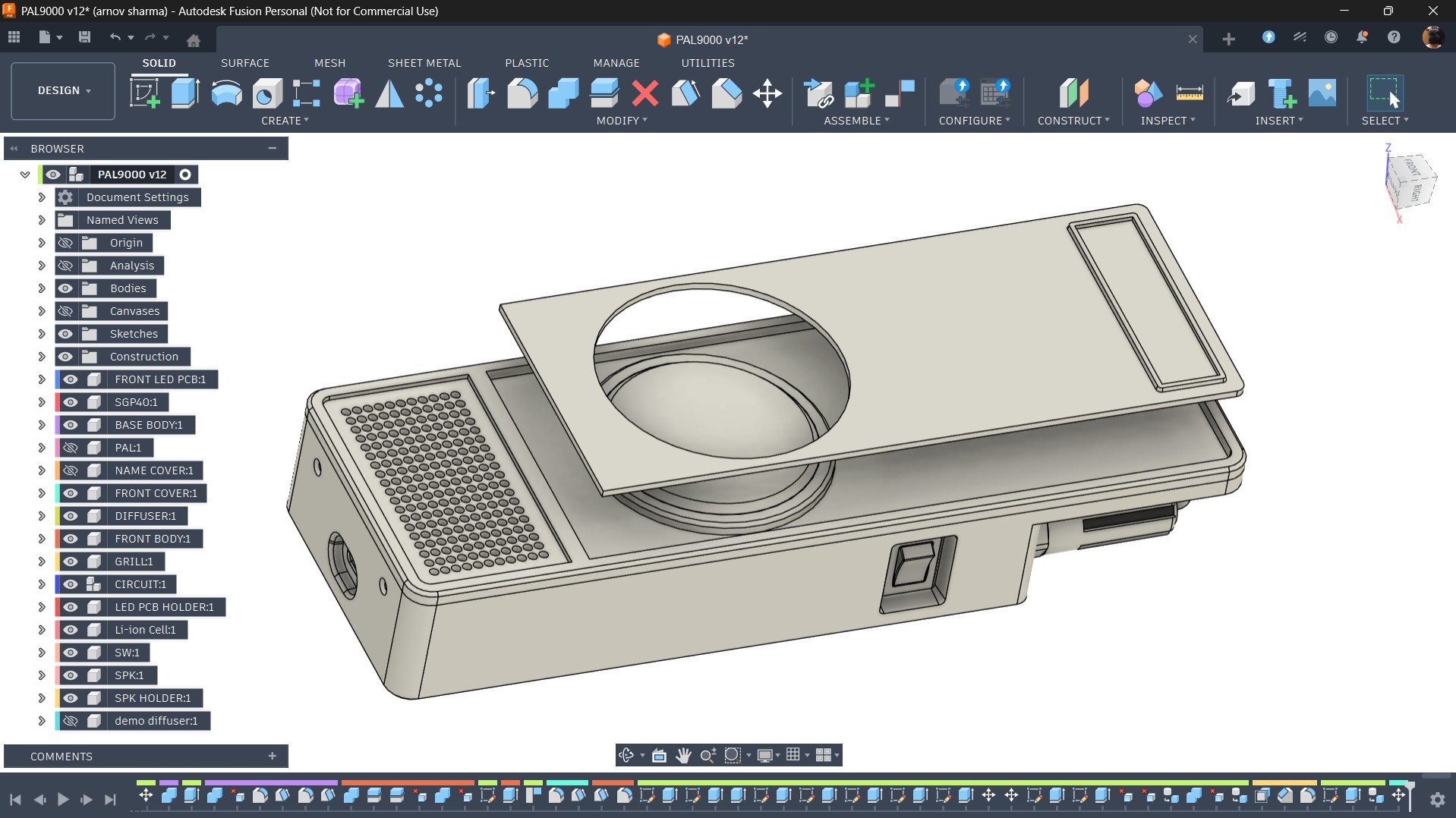

To get started with the design, I began by preparing the enclosure in Fusion 360. I imported 3D models of my existing LED board and Pico driver board from previous projects and searched for a high-quality front-facing reference image of HAL 9000. This image was used to trace the basic outline of the enclosure, which was then extruded and refined to house the Pico driver board and LED board inside. The LED board...
Read more »