Sritabh Priyadarshi
Sritabh Priyadarshi-
Sensing classifier with single input
05/12/2026 at 17:56 • 0 commentsAggressive tapping, a gentle caress, a deliberate tap. These are emotionally distinct interactions and I wanted the robot to respond to them differently.
The question was: how much hardware does that actually require?
I started with the simplest possible input, a single capacitive touch sensor. One sensing point. One time series of capacitance values.
Then I extracted basic features from each touch event: duration, peak value, mean, minimum, rise rate, fall rate, and area under the curve.
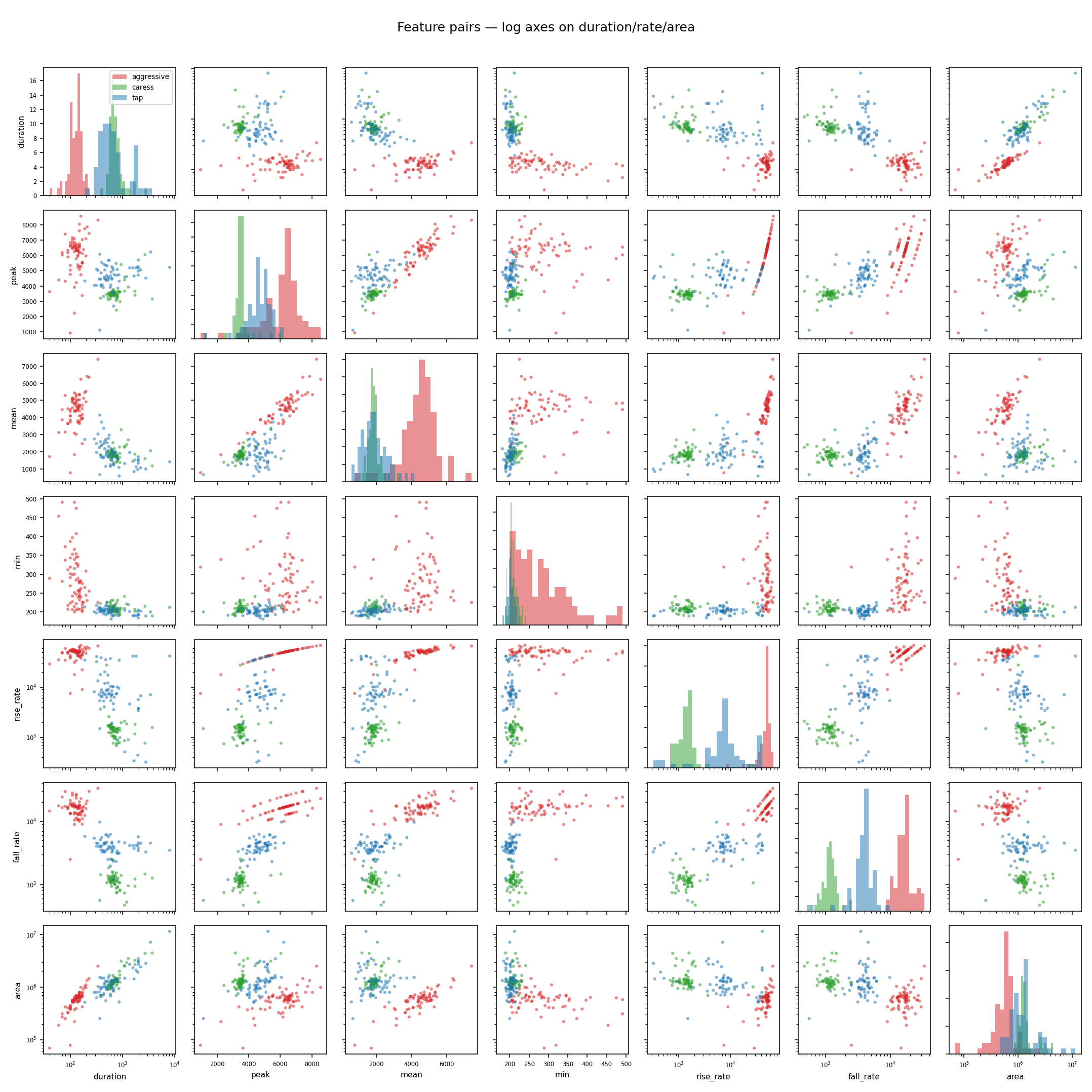
What I didn't expect was this
![]()
The three touch classes aggressive, caress, tap, separate cleanly in feature space. Especially on rise_rate and fall_rate (log scale). The information was always encoded in the shape of the signal. How fast the capacitance climbs. How fast it falls. How long it lingers.
A caress is slow in both directions. An aggressive touch hits hard and releases sharply. A tap is brief and decisive.
![]()
Needed such happiness for the recent hard days
-
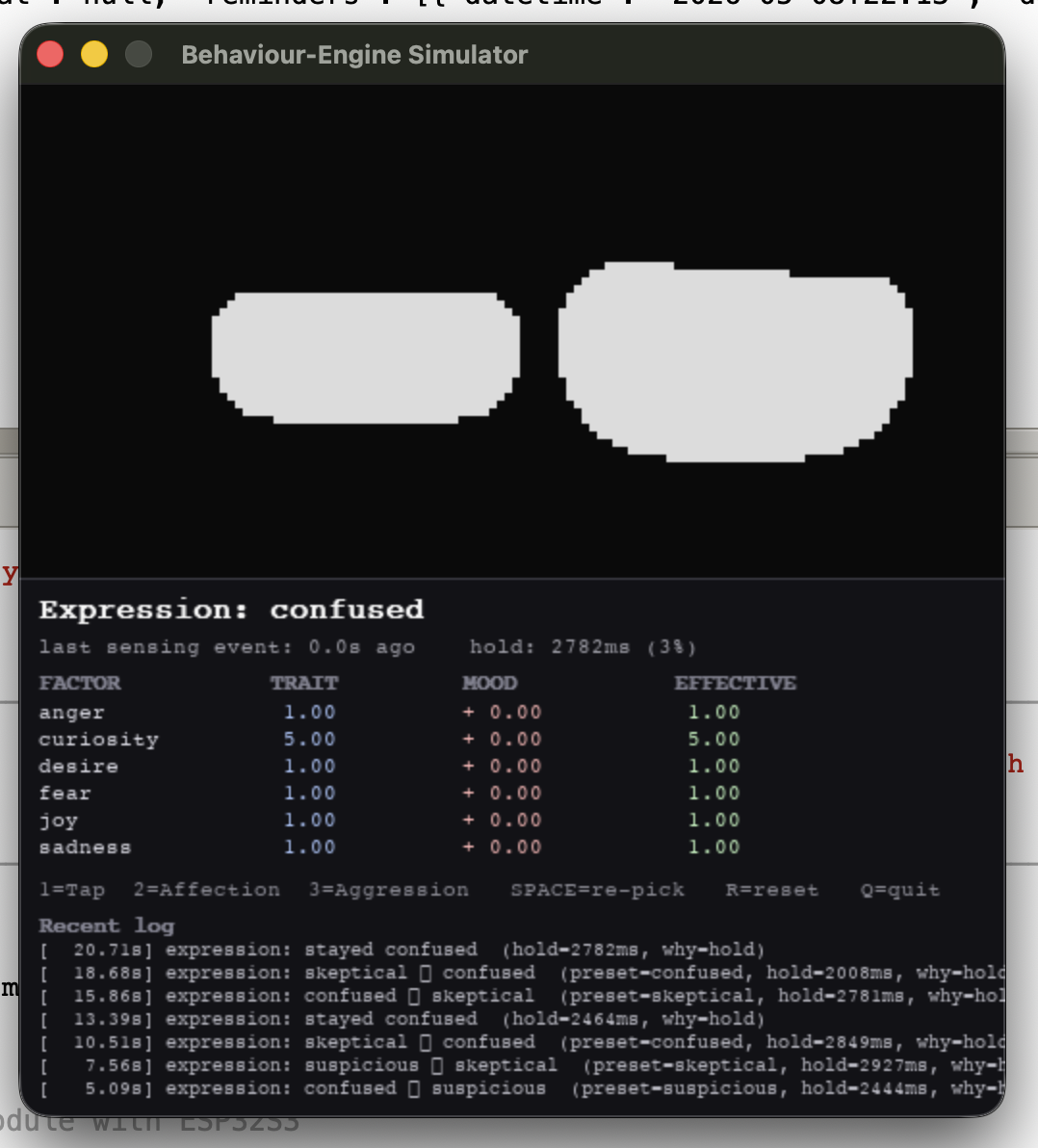
Behavioural Engine Algo design
05/09/2026 at 07:01 • 0 commentsDefined how the behaviour should affect the personality factors and how the mood would be changed
![]()
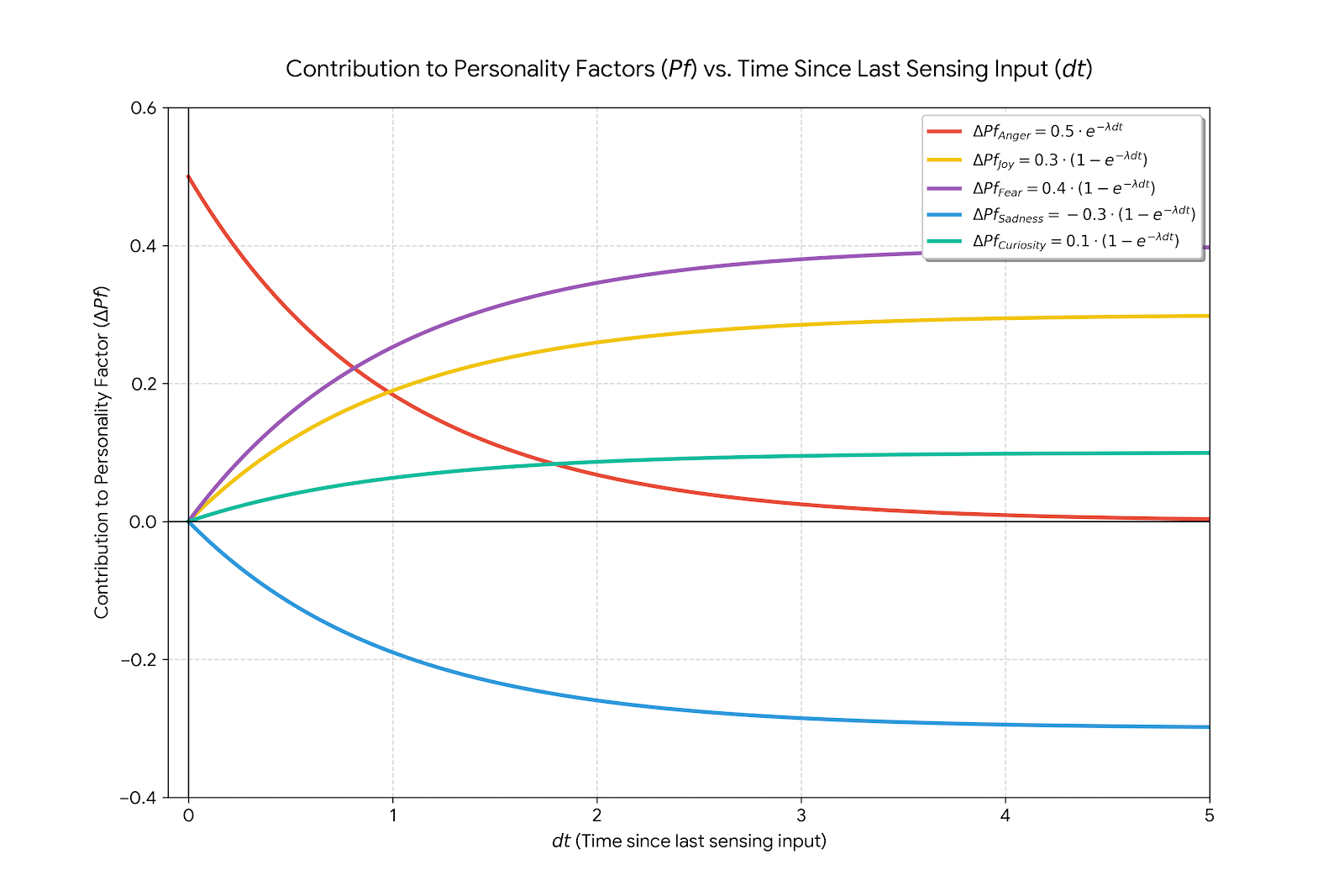
Interaction definition affecting personality factors
For tap![]()
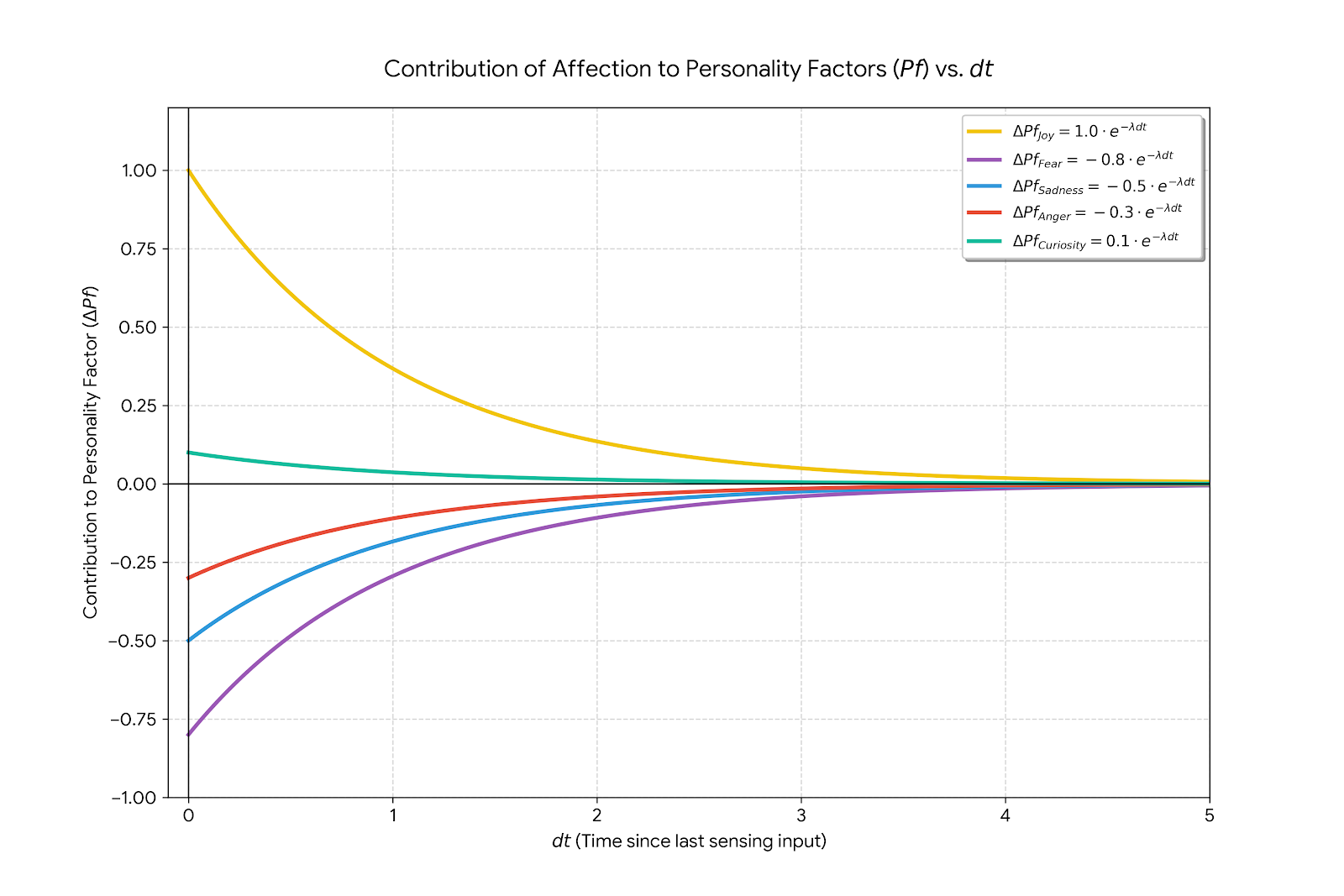
For Affection
![]()
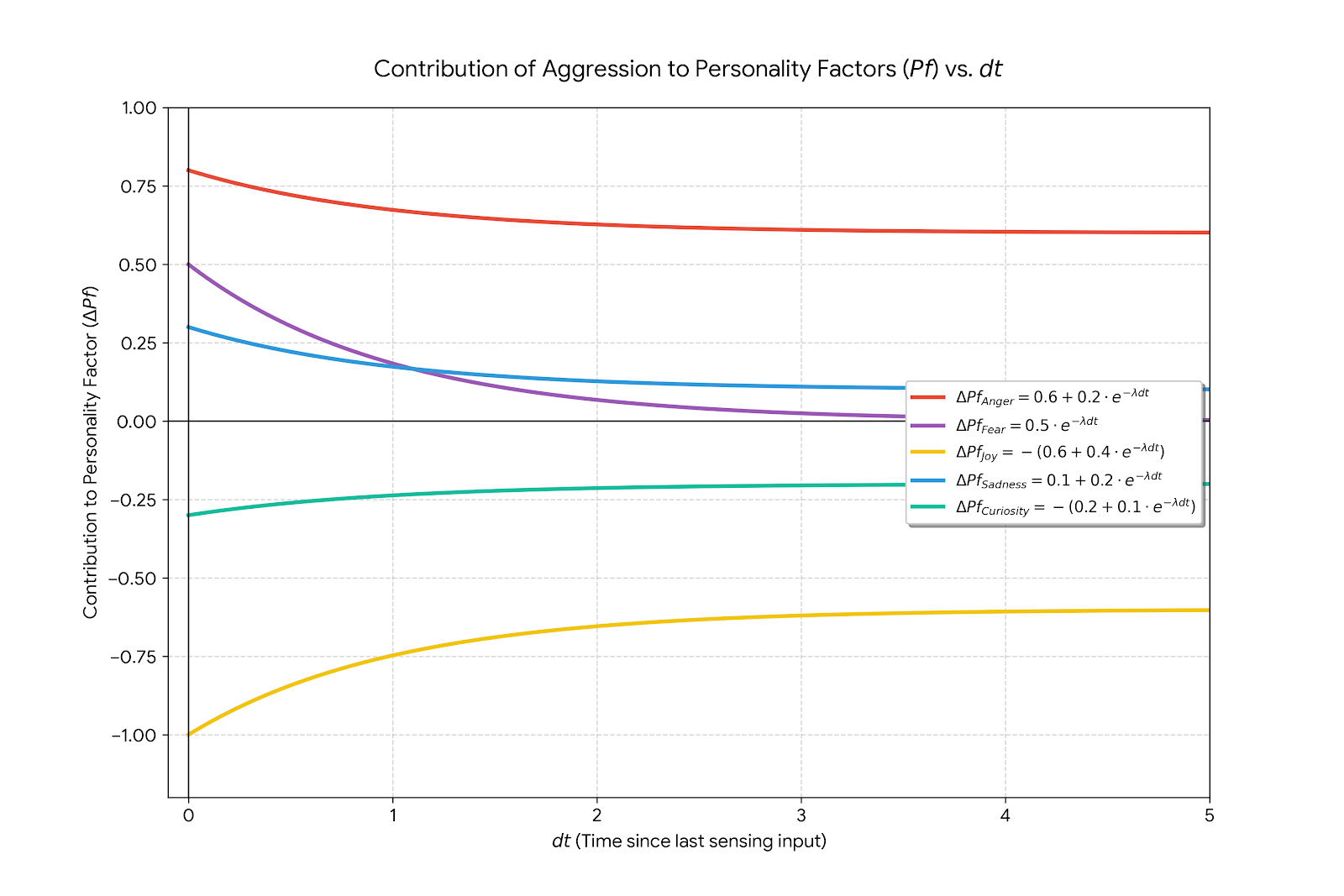
For Aggression
![]()
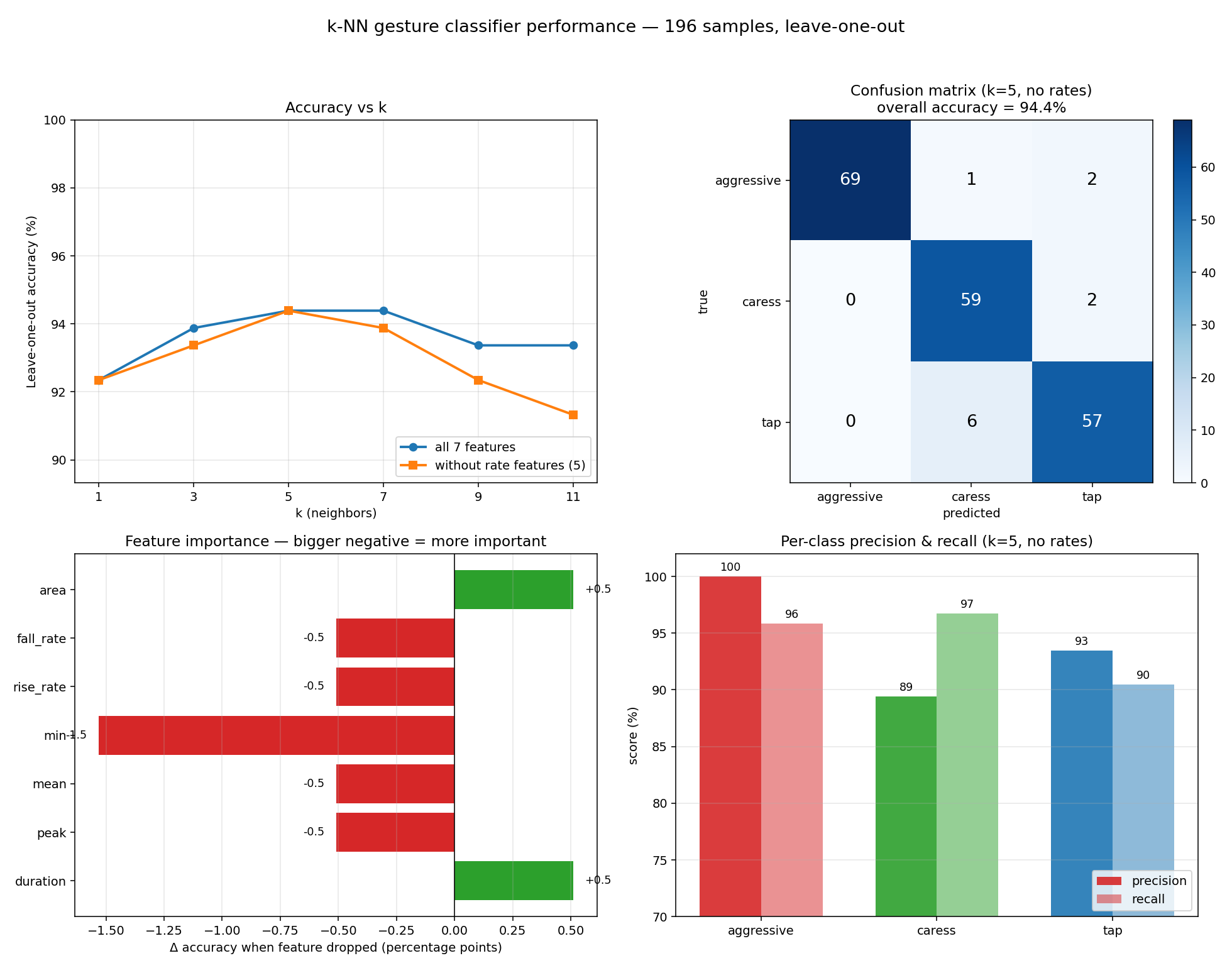
Next thing to work on is classifying interaction using KNN along with some refactoring.
MiniSoul
A small size companion robot with personality of its own.