 Mach Mind
Mach MindBuild details are provided on GitHub together with source code, drawings, photos.
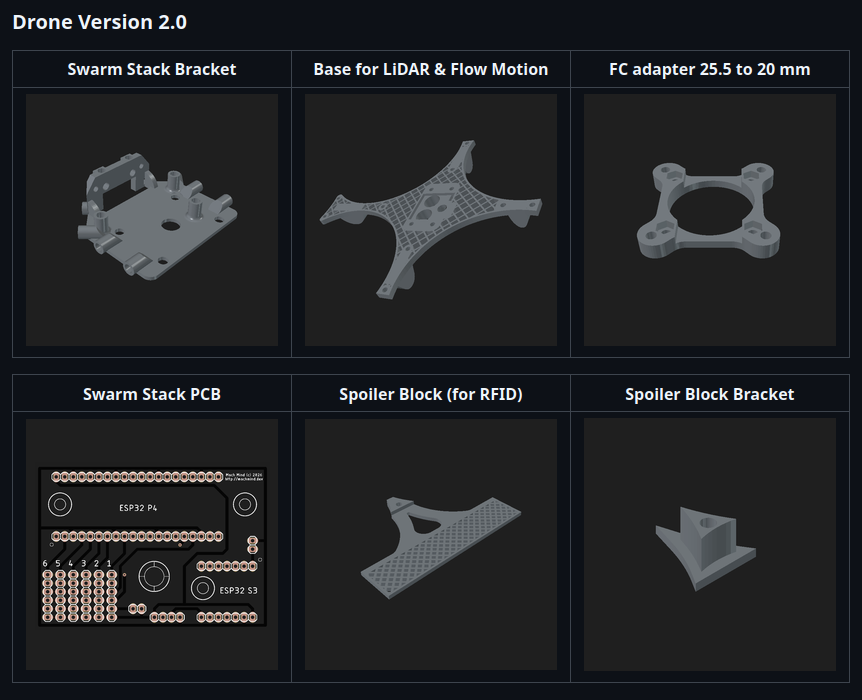
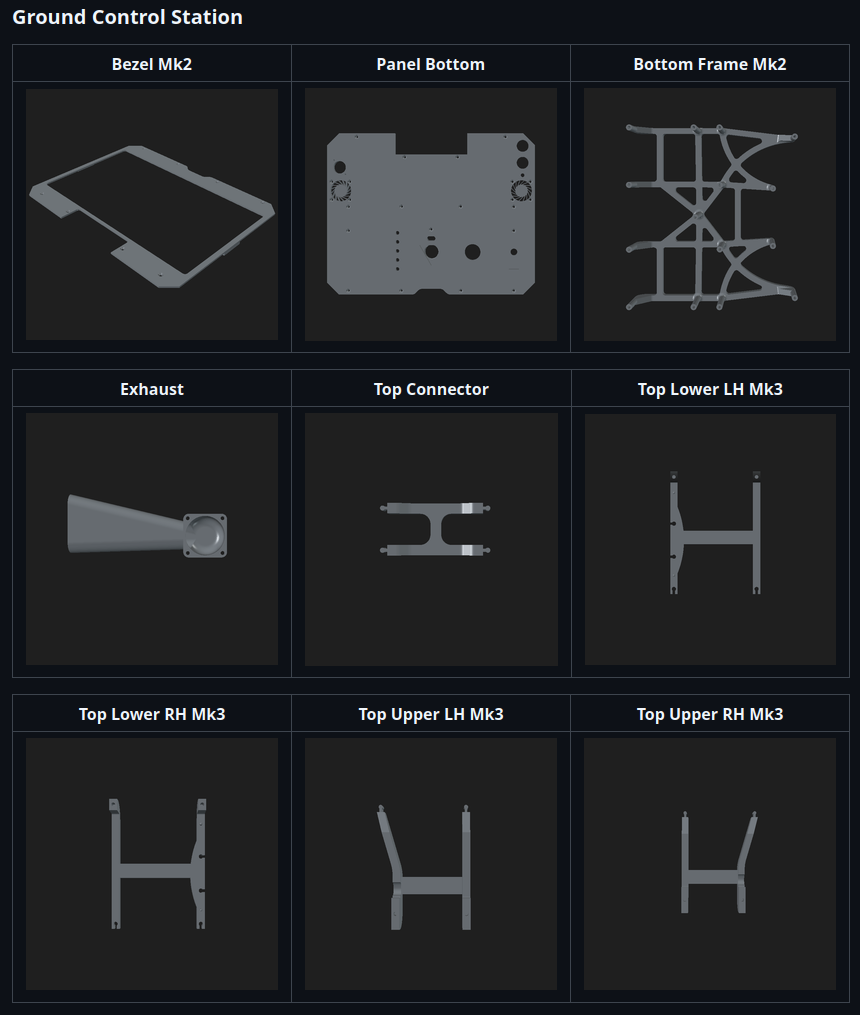
Capture-the-flag swarm — dual-ESP32 drones (P4 onboard vision, S3 comms), PX4 flight, ROS2 ground station. Open-source.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Build details are provided on GitHub together with source code, drawings, photos.
Timeline
What's next
Finishing the ArUco-EKF localization so the drones hold an absolute position reference (which also unlocks real coordinate tasking from the LLM layer) and getting ready for next challenge.
 Artur
Artur
 avi448
avi448
 Kai Tung Yu
Kai Tung Yu
 CiferTech
CiferTech