 VU Nhat Minh
VU Nhat MinhThe first walking simulation in Matlab (LCP integrator)
The simulation model is written in Matlab (ODE45)- Operation Space Control for mapping joint torques
Implementing controller in Open Dynamic Engine environment
Inspiring from the reduced-order model (Trunk Spring Loaded Inverted Pendulum -TSLIP), the controller leads robot to steady walking motion.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
 ssla-couk
ssla-couk
 ensafatef
ensafatef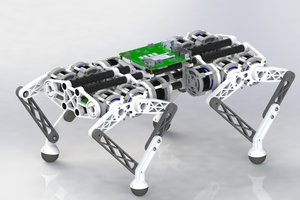
 pat92fr
pat92fr
 Open FURBY
Open FURBY