Husarion
Husarion-
Husarion cloud security
08/03/2017 at 14:54 • 0 commentsIt’s not enough that your robot simply connect to the internet. It should be connected securely, so no one has an access to your devices without your approval.
At Husarion we address your robot’s security in a few different areas:
a) Connection between CORE2 and cloud platform - every single message is encrypted and full SSL protocol is implemented, both for CORE2 and CORE2-ROS.
b) Your cloud account and code execution - JavaScript code that powers the user interface is executed in a separate sandbox for each robot. When you compile code in the Web IDE, the compilation also takes place in a sandbox. Working in sandboxes guarantees that users cannot affect the operation of the server or other user accounts.
c) Robot sharing settings - security needn’t mean that only you can use your robots. Thanks to sharing settings you can share your robots with your friends for a fixed amount of time (a few minutes, a few hours, a few days, … or forever) and with specified access rights (read-only, full control etc.). After you select the access rights, you can decide how you will share your robot.
There are two ways:- Through a “magic link” - anyone who has the link can access the robot - even without an account at cloud.husarion.com.
- Sharing only to cloud.husarion.com users. With this option, your friends see your robot at their robot list, and even can change it’s firmware if you give them liberal access rights.
d) Web console to CORE2-ROS: you can access Linux console of your CORE2-ROS from your cloud.husarion.com user account. It doesn’t matter which network your robot is connected to. The connection is done using the https://www.zerotier.com/ project that provides a secure and effortless VPN setup between your computer and your CORE2-ROS.
e) Run air-gapped robots: the most security sensitive robots can be operated without any access to the internet at all, thanks to our offline SDK.
You don’t need to be an internet technologies expert to be able to manage your CORE2 based robots online without worrying about an unauthorized access to your devices. You can focus just on your robotics application instead.
-
Do I need Husarion Cloud to use CORE2?
07/28/2017 at 16:02 • 0 commentsOne question we frequently hear is “do I need Husarion Cloud to use CORE2?”. The answer is simple: “no, don’t worry, we’ll provide offline development tools as well.”
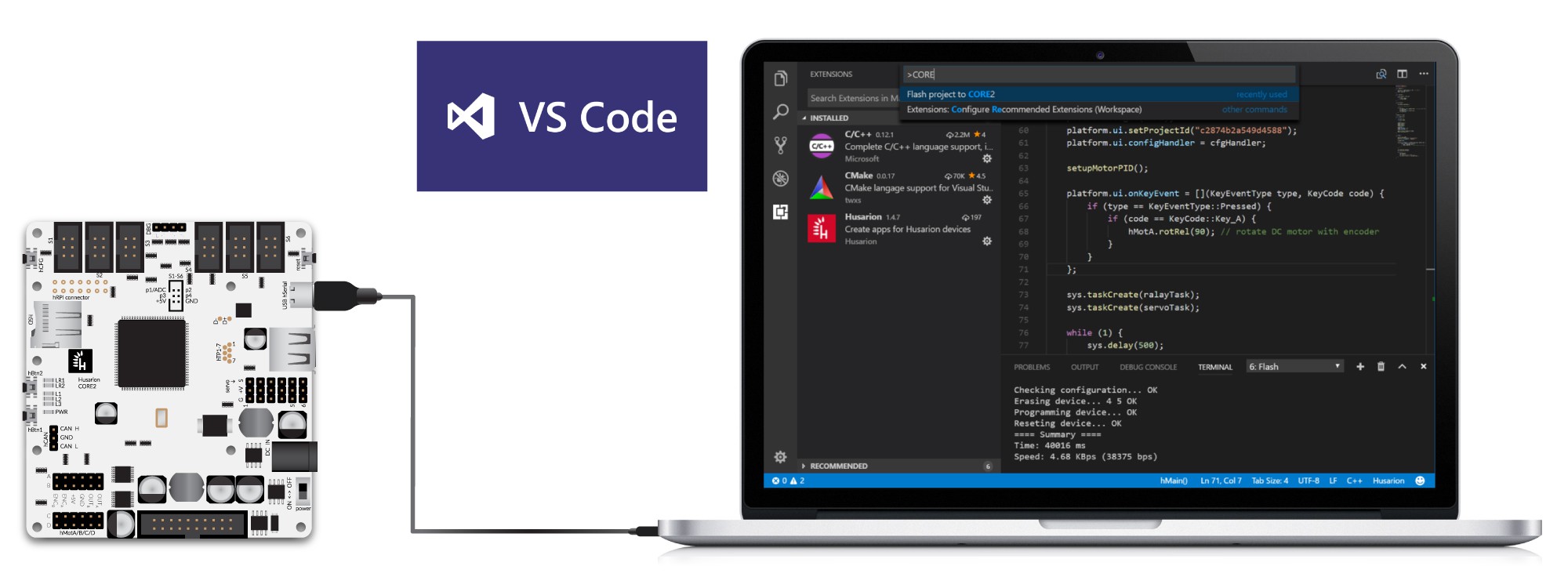
To this end, we created a “Husarion extension” for Visual Studio Code that prepares the development environment for you, installs the toolchain, and downloads the SDK. This lets you develop code for your robot completely offline.
![]()
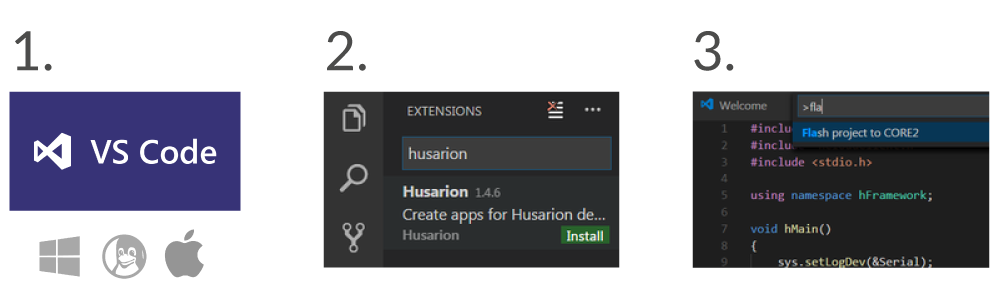
Installing and using “Husarion extension” is straightforward:
![]()
- download the Visual Studio Code
- install the Husarion extension
- write code and flash CORE2 using USB cable
If you’re a user of Emacs, Vim, Eclipse, or any other code editor or IDE, you can download our SDK and configure your favorite development environment as well.
-
Printable 3D models of CORE2 enclosures now available on GitHub
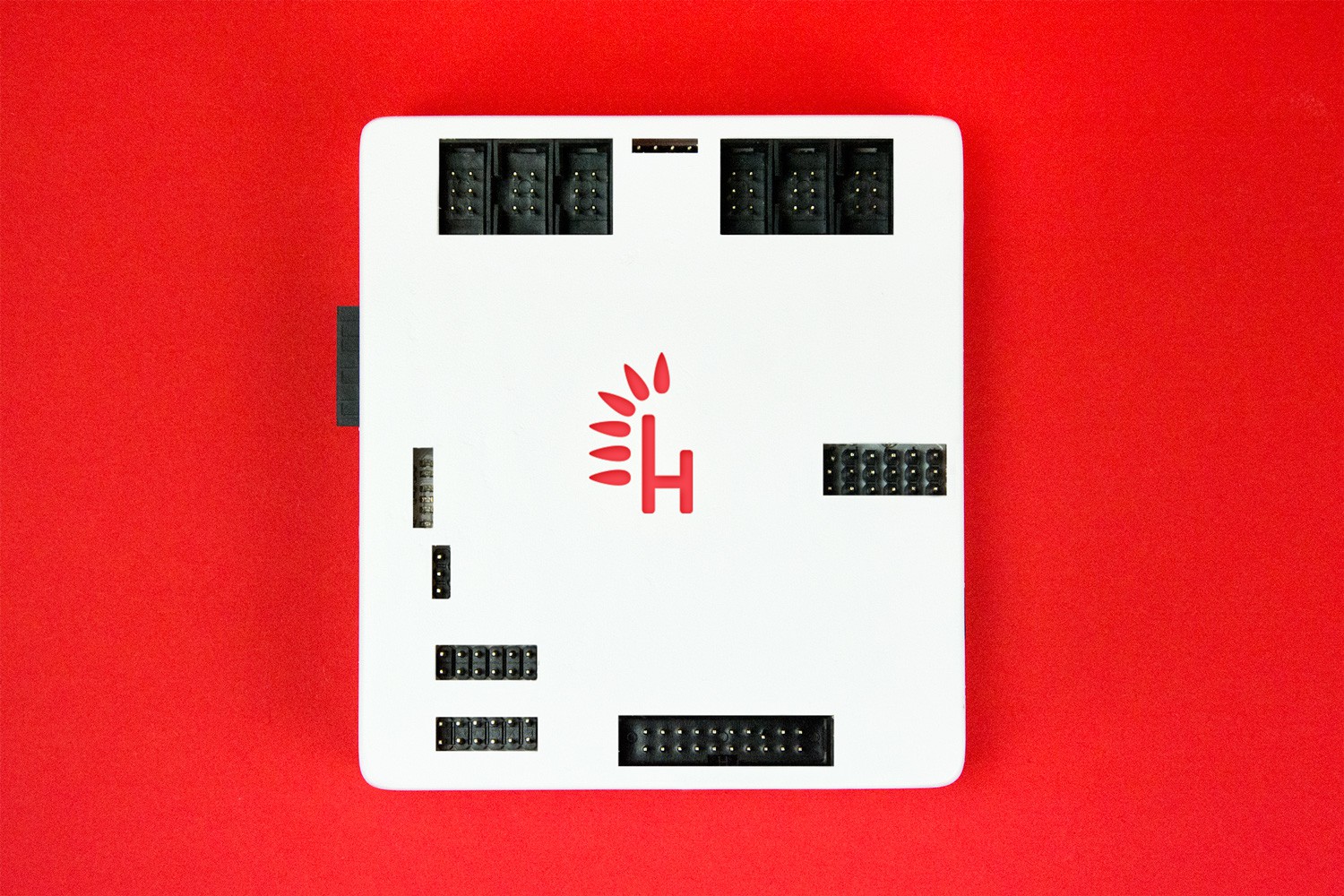
07/10/2017 at 13:36 • 0 commentsIf you have a 3D printer or other possibility to fabricate a plastic casing - we have a good news for you! We’ve designed simple enclosures for our different board configurations:
- CORE2 only
- CORE2-ROS (the top cover is the same, but the bottom cover is extended to cater for the BC size)
- CORE2 with CORE2brick shield (the bottom cover is the same as for CORE2, but the top cover is extended to cater for the shield size)
- CORE2-ROS with CORE2brick (top & bottom covers are extended)
![]()
![]()
Enclosures are open source and available on our GitHub: https://github.com/husarion/CAD-Models
-
ROS tutorial for Husarion CORE2 is ready!
07/02/2017 at 20:30 • 0 commentsThe first 6 lessons of ROS tutorial for Husarion CORE2 are available here https://husarion.com/core2/tutorials/ros-tutorials/1-ros-introduction .
Instructions are created for ROSbot, but you can learn a lot if you have only CORE2-ROS.
Covered topics are:
- ROS introduction
- creating nodes
- simple kinematics for mobile robot
- visual object recognition
- running ROS on multiple machines
- SLAM navigation
- Path planning
- Unknown environment exploration
Check it out!
![]()
CORE2 - A computer for robots
ARM Cortex-M4 + ARMv8. Motor interfaces. 54 I/O with UART, SPI, I2C, CAN. C++ 11 API. Cloud management. ROS-powered.