 matt venn
matt vennThanks to Klaas for a great write up on a cnc spindle controller of which this project is mostly a copy of. Also, thanks to Mic for his work on the triac bloc.
The controller consists of:
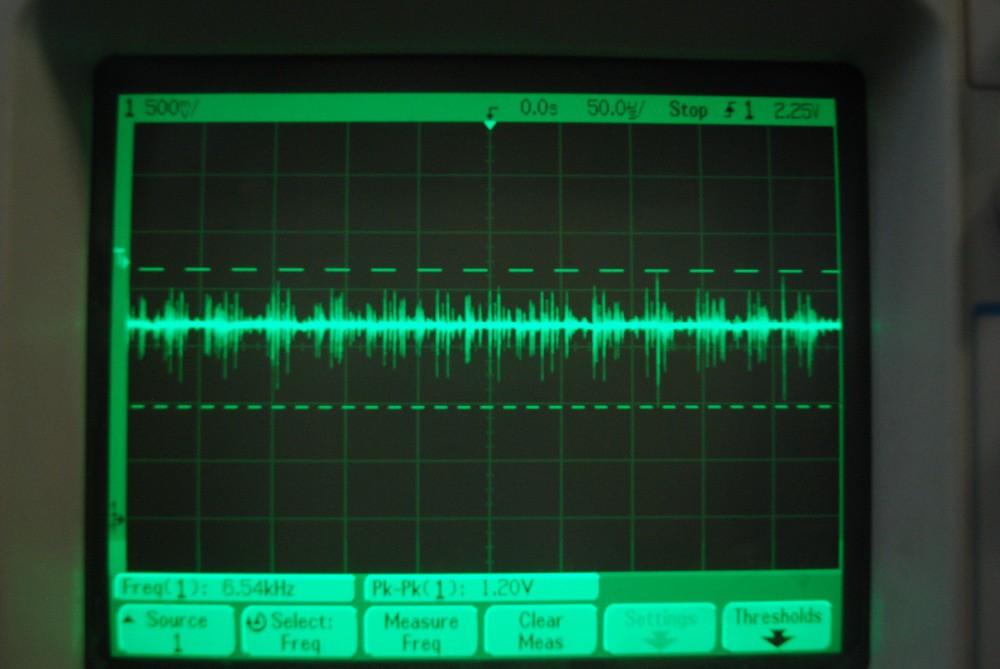
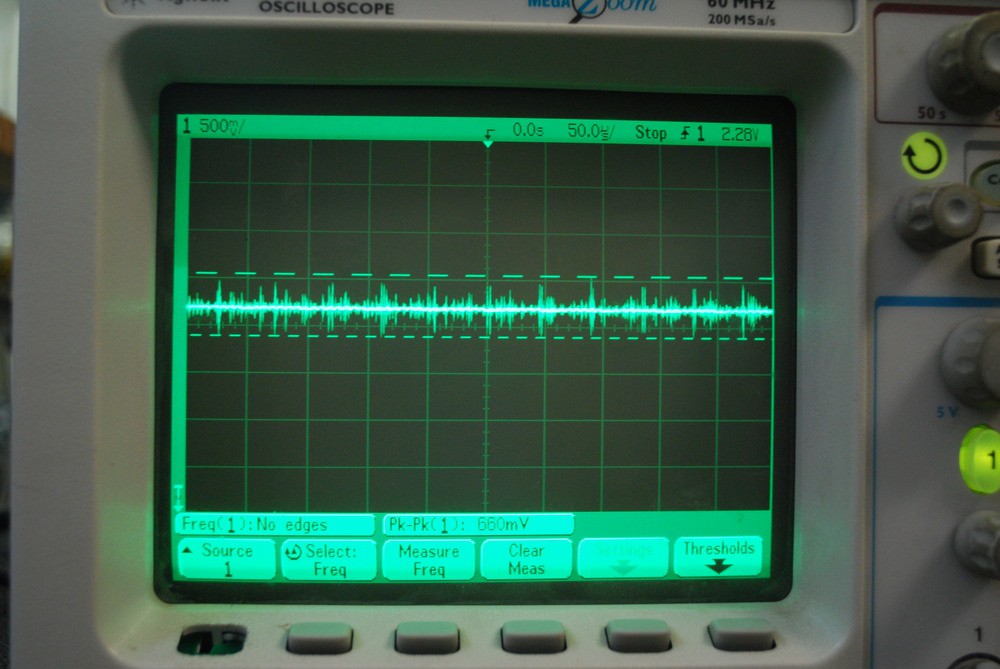
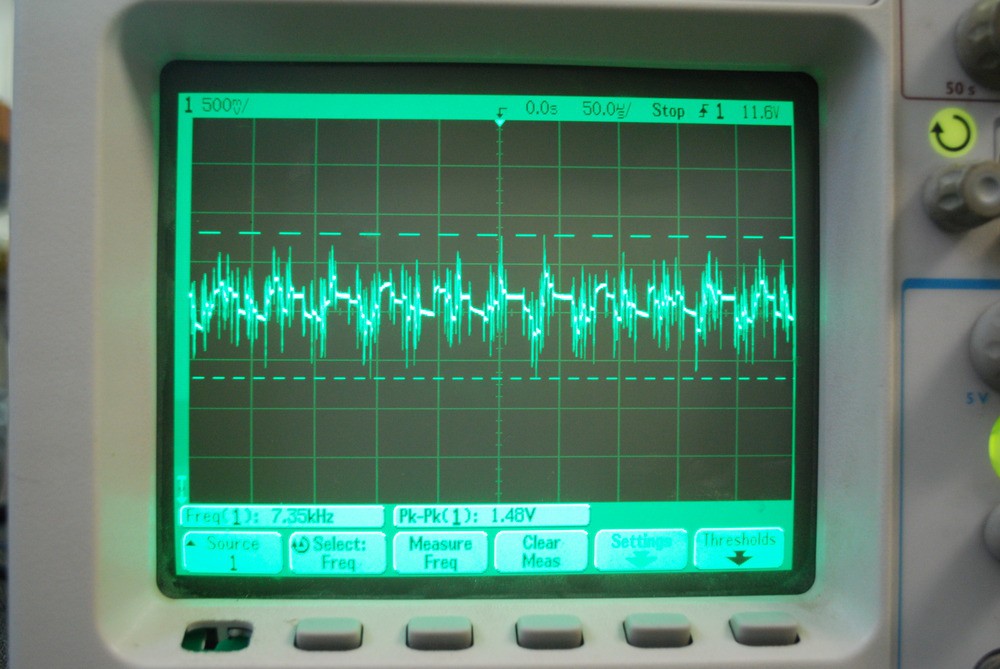
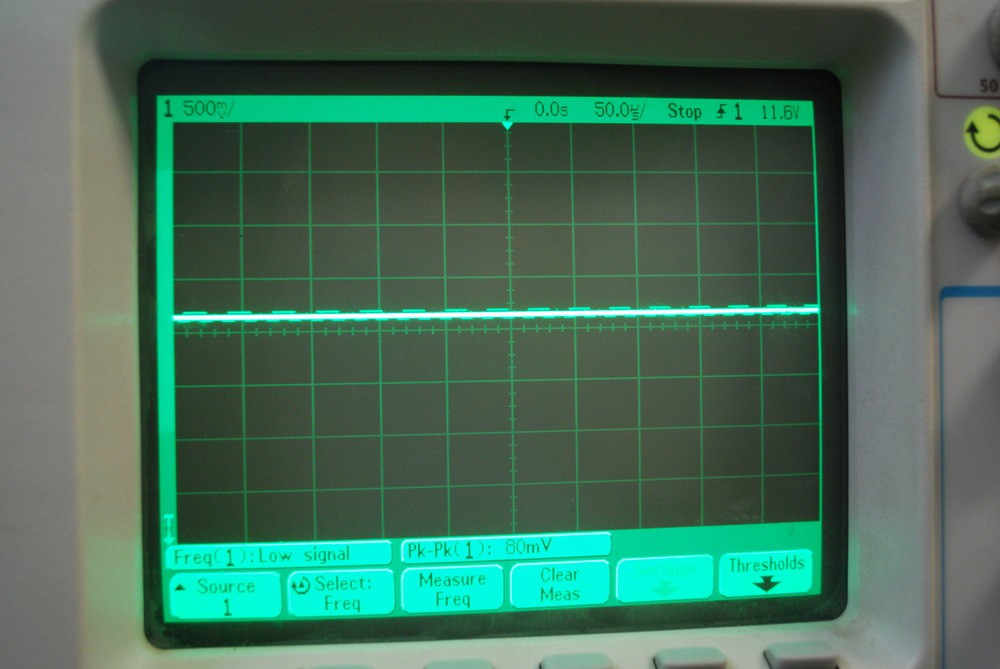
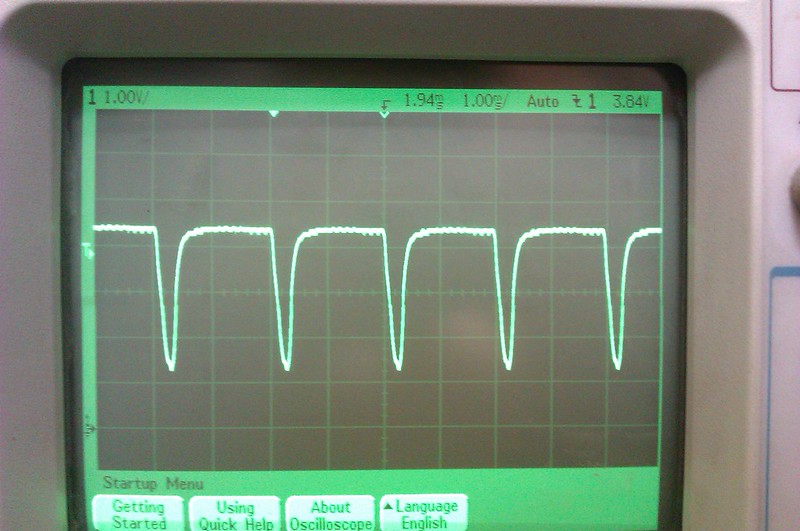
- an RPM sensor (an opto emitter and receiver pair) mounted in the router body
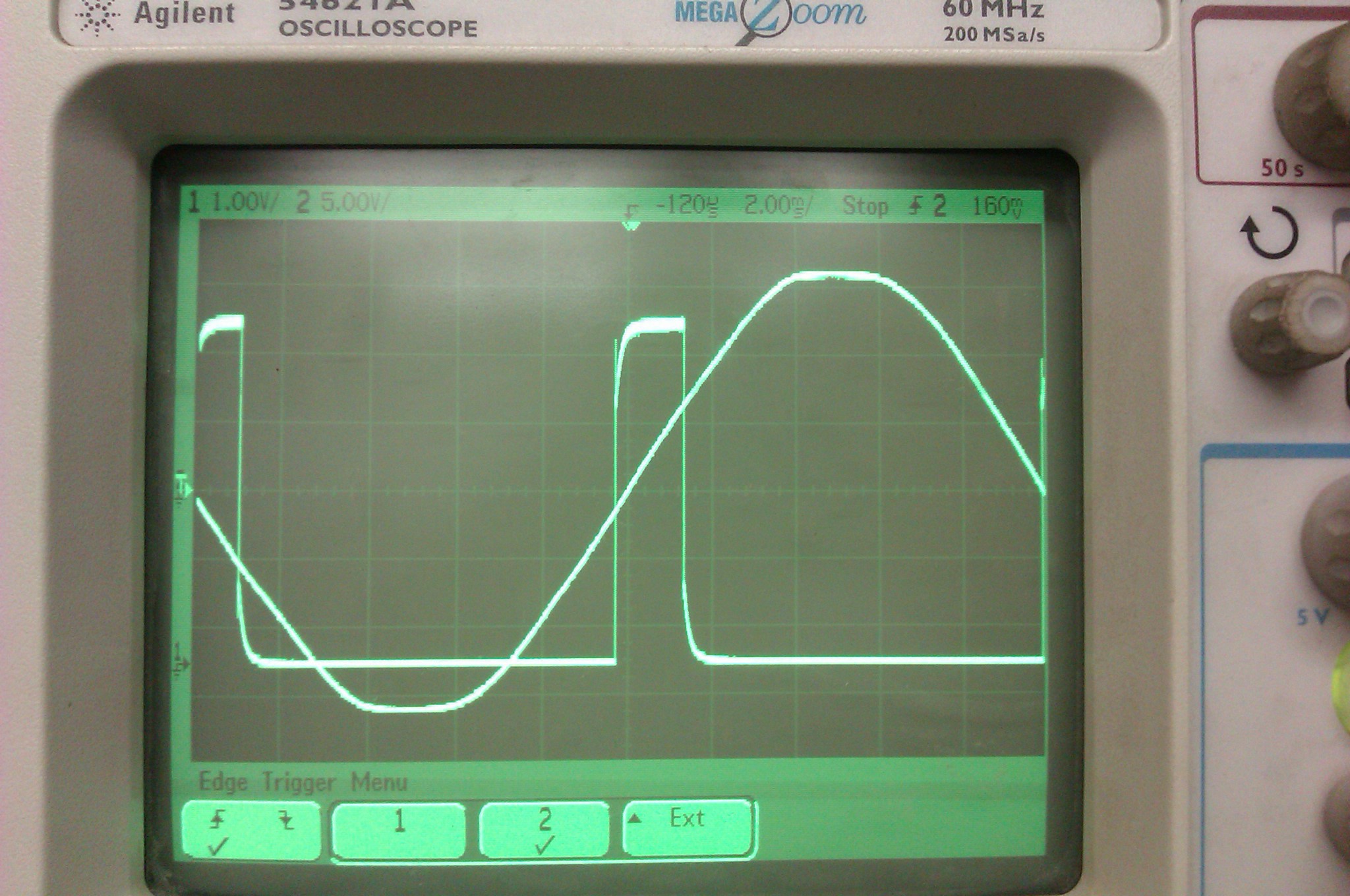
- a TRIAC to control the router speed
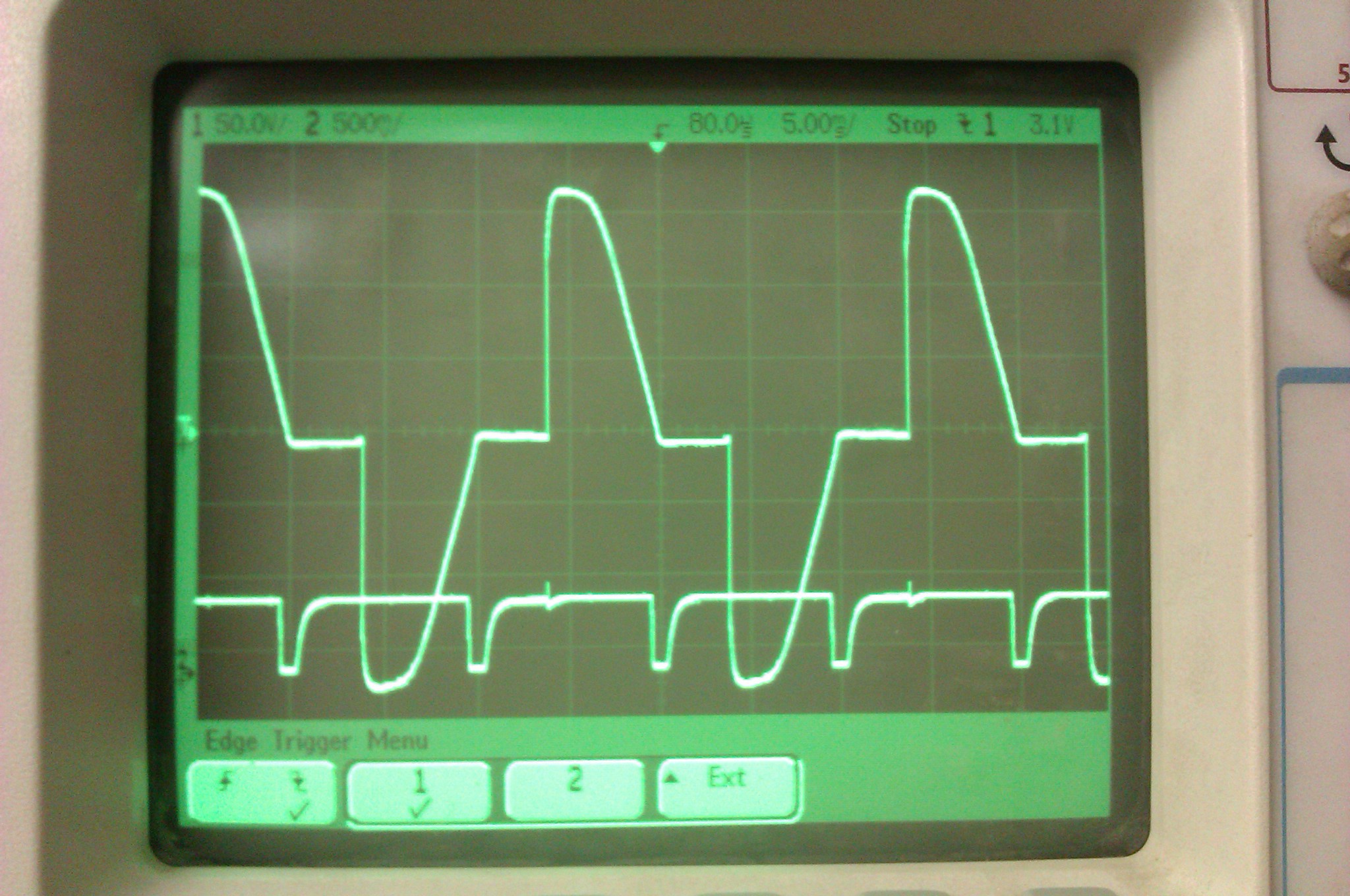
- a zero cross detector so we can do phase control
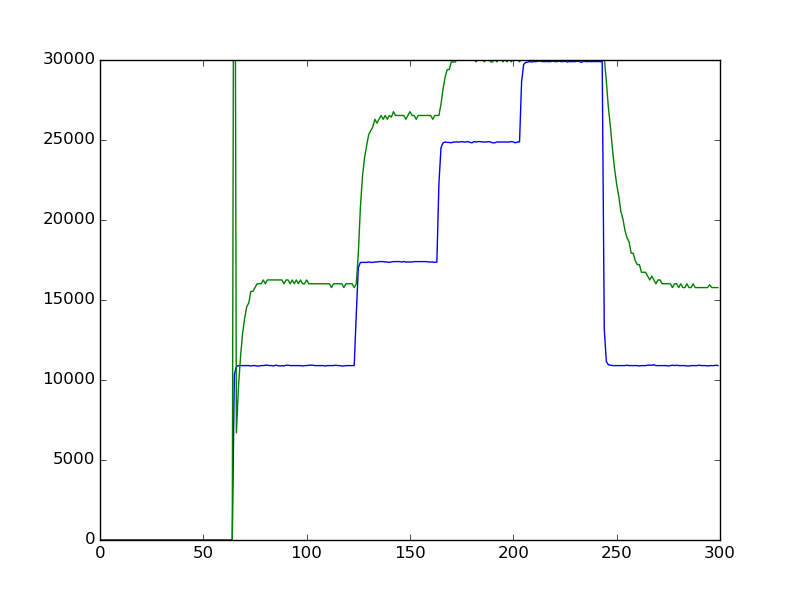
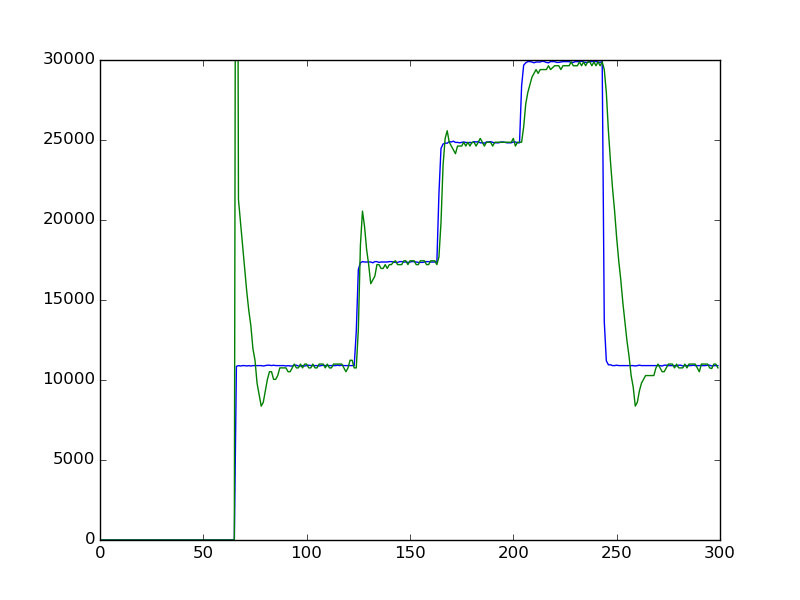
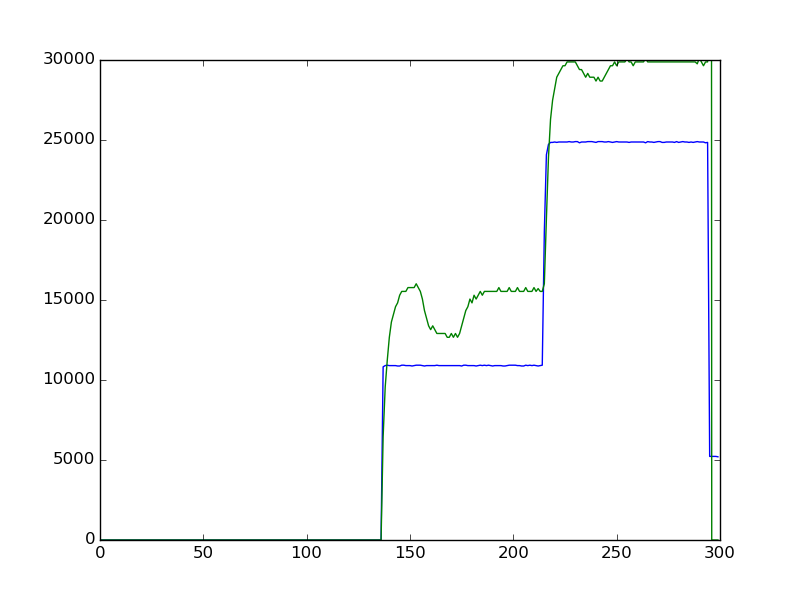
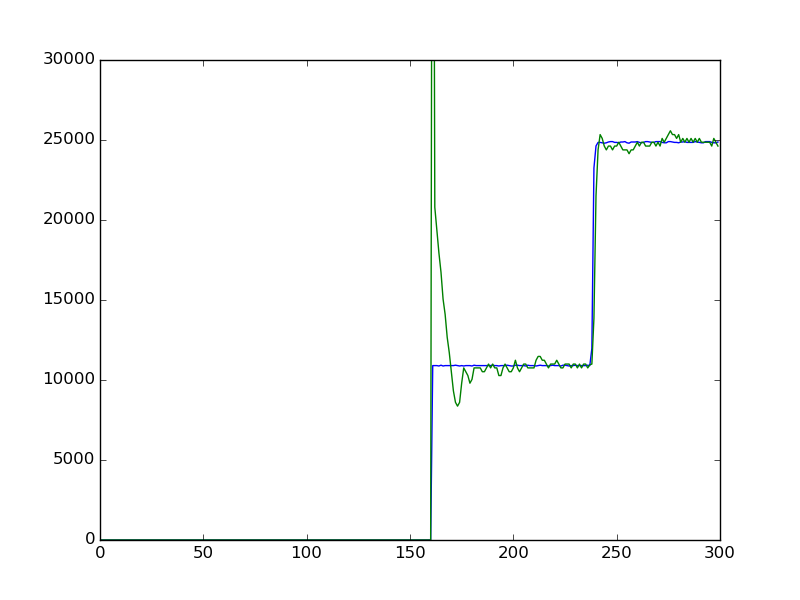
- an Arduino to compare the target RPM with the real RPM and make changes using PID
You can order a PCB from osh park, and you'll need components spec'd in the BOM. If you are going to give it a go then let me know because I've made a few changes that haven't been merged into the schematic yet. Check the todo section of the github readme.




 Cees Meijer
Cees Meijer

 Ossum
Ossum
Hi, I need some help. I have made the exact hardware you made, but there is a problem: my triac get shorted after a minute of free run. I decided to test the Kress motor with a vacuum cleaner speed control board of 1600W and that triac got shorted to after 5min.
My kress530 is new, never used. There are two things that I can imagine that are burning my triacs:
1. The bearings get a little hot ( I found that can happen on never used Kess motors and in time the heat will disappear)
2. I did not removed the capacitor from inside the motor - under the switch - 0,22uF (should be removed?)