 Muhammed Azhar
Muhammed Azhar-
1Step 1
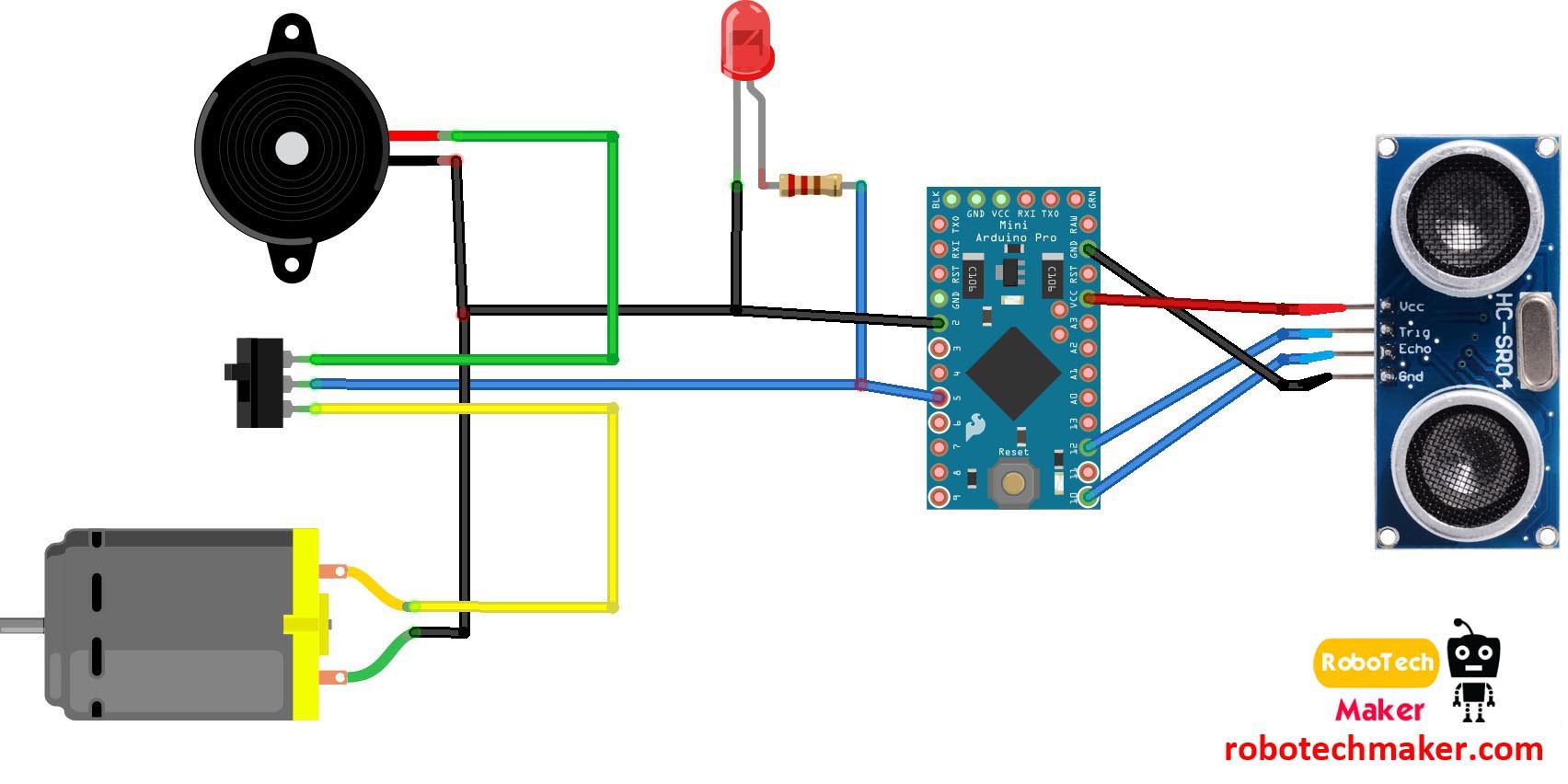
Circuit Diagram - Descriptions.
![]()
![]()
Wiring instruction.
Ground of LED, buzzer and vibration motor to GND of arduino
+ve of LED and middle leg of switch to Arduino pin 5
+ve of Buzzer to first leg of switch
+ve of Vibration motor to third leg of switch
Ultrasonic sensor
Ultrasonic sensor pin VCC - Arduino pin VCC
Ultrasonic sensor pin GND - Arduino pin GND
Ultrasonic sensor pin Trig - Arduino pin 12
Ultrasonic sensor pin Echo - Arduino PIN 12
The switch used here is for selecting the mode. ( buzzer or vibration mode.)
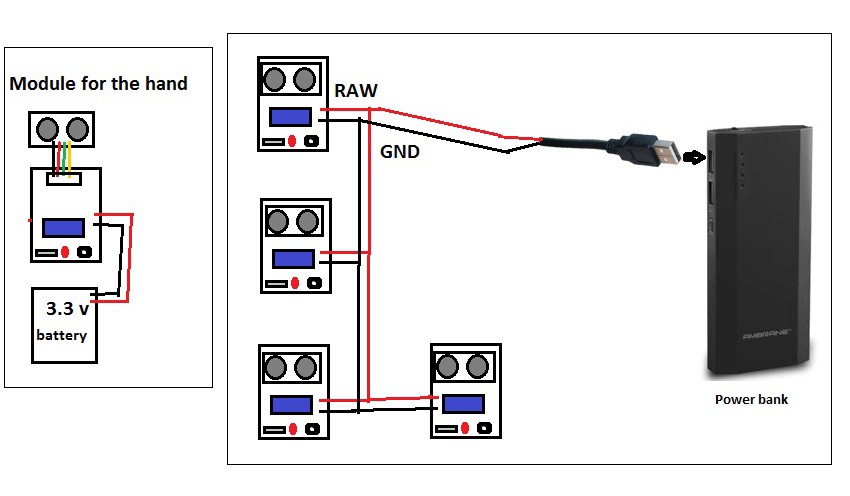
Figure 2 - Powering the modules - Connect the 4 arduino pro mini to a USB male pin and connect to a power bank. For the module in the hand use a small lithium battery.
-
2Step 2
Making the Modules
![]()
![]()
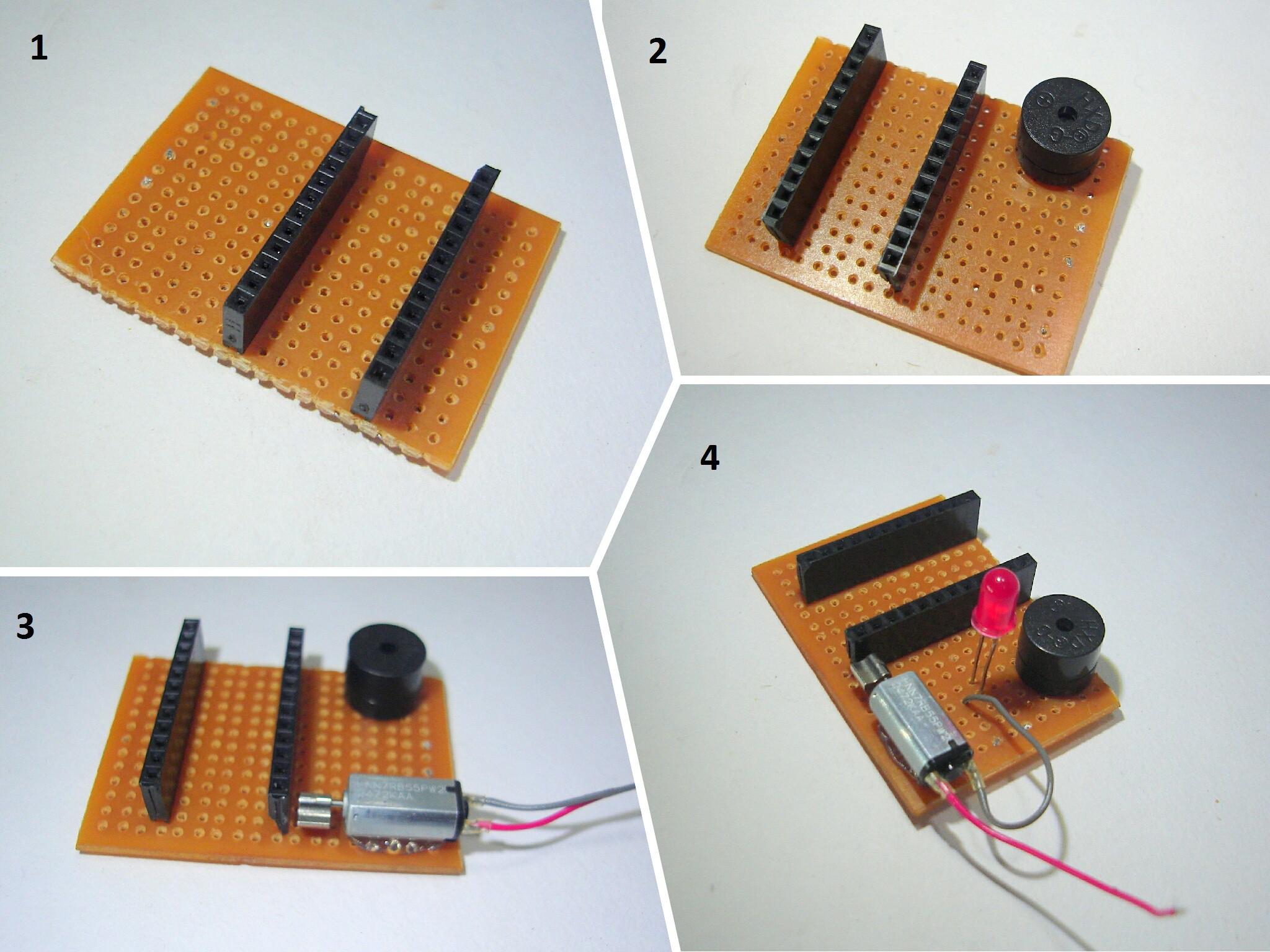
- First cut the pref board in 5 X 3 cm dimension and solder the female headers for the arduino to the board.
- Then solder the buzzer.
- Then connect the vibrating motor using the glue gun and solder wires to it.
- Then connect the LED.
- Then connect the switch.
- Then connect header pins for ultrasonic sensors and for battery input.
- Then solder everything as shown in the circuit diagram.
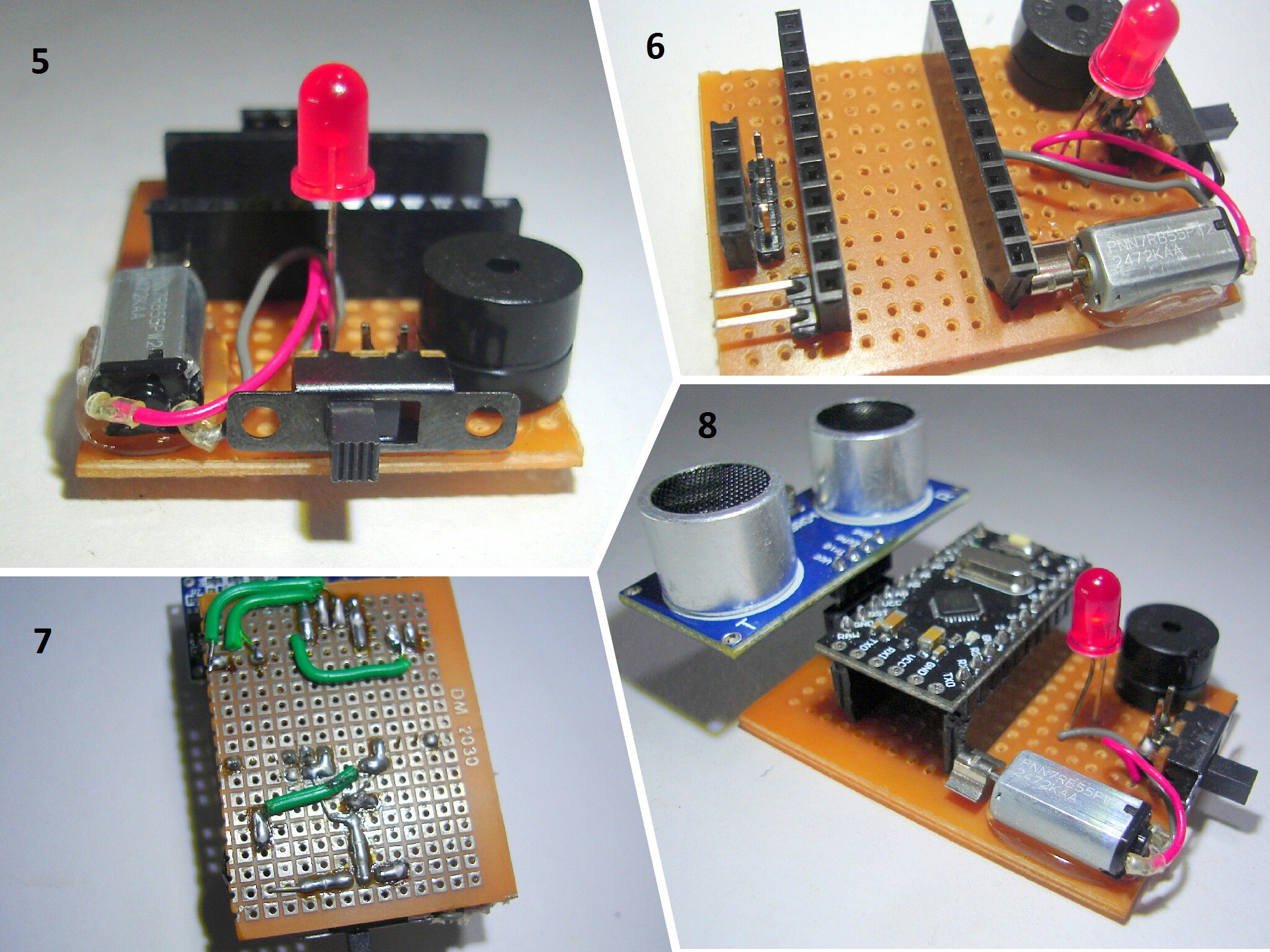
- Now connect the arduino and ultrasonic sensor to the board
Also connect the elastic band to all the modules.
3 more modules are to be made in the same way us described above, but for the one in the hand, there is a little difference. visit the next step before making that last module
-
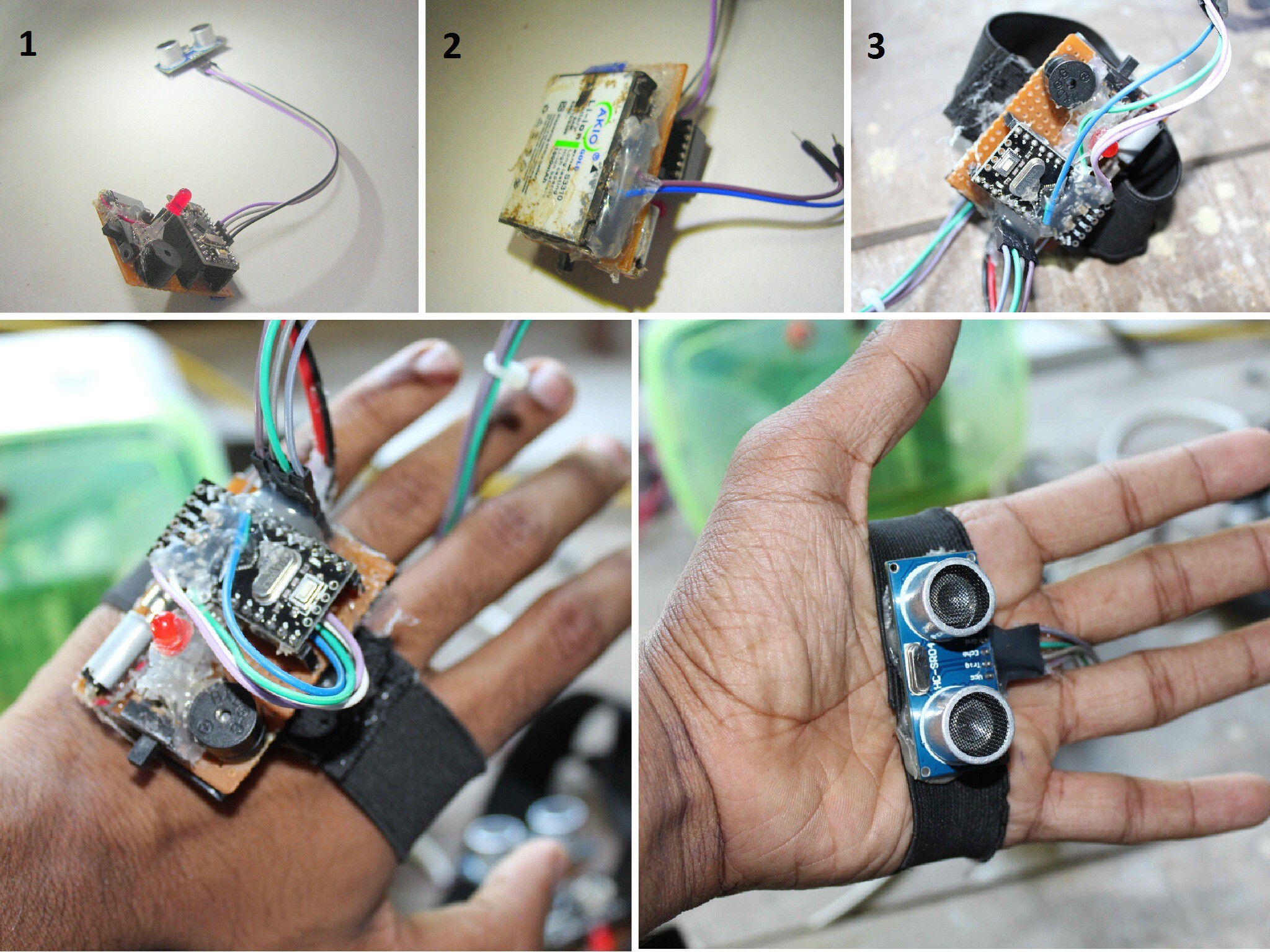
3Step 3
Code + Making the Module for the Hand
![]()
- Connect the ultrasonic sensor to the board by using 4 jumper cables.
- Then connect a 3.7 volt mobile battery to this module.
- Then connect the elastic band as shown in the figure.
At last upload the code to each arduino board and power the 4 other modules using a power bank.
Code used in the arduino -
//VISIT : www.robotechmaker.com const int pingTrigPin = 12; //Trigger connected to PIN 7 const int pingEchoPin = 10; //Echo connected yo PIN 8 int buz=5; //Buzzer to PIN 4 void setup() { Serial.begin(9600); pinMode(buz, OUTPUT); } void loop() { long duration, cm; pinMode(pingTrigPin, OUTPUT); digitalWrite(pingTrigPin, LOW); delayMicroseconds(2); digitalWrite(pingTrigPin, HIGH); delayMicroseconds(5); digitalWrite(pingTrigPin, LOW); pinMode(pingEchoPin, INPUT); duration = pulseIn(pingEchoPin, HIGH); cm = microsecondsToCentimeters(duration); if(cm<=50 && cm>0) { int d= map(cm, 1, 100, 20, 2000); digitalWrite(buz, HIGH); delay(100); digitalWrite(buz, LOW); delay(d); } Serial.print(cm); Serial.print("cm"); Serial.println(); delay(100); } long microsecondsToCentimeters(long microseconds) { return microseconds / 29 / 2; }Thank you!
Third Eye for The Blind
An innovative wearable technology for visually impaired.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
very diligent..can I ask..this project not have block diagram?..
Are you sure? yes | no