Mike Holden
Mike Holden-
Sacramento River Delta
10/21/2017 at 19:31 • 0 commentsTook n3m0 out to Sherman Island near Rio Vista, CA.
Seems totally water-tight!
-
Payload computer details
08/10/2017 at 19:14 • 0 commentsI put the current code for the payload computer on github.
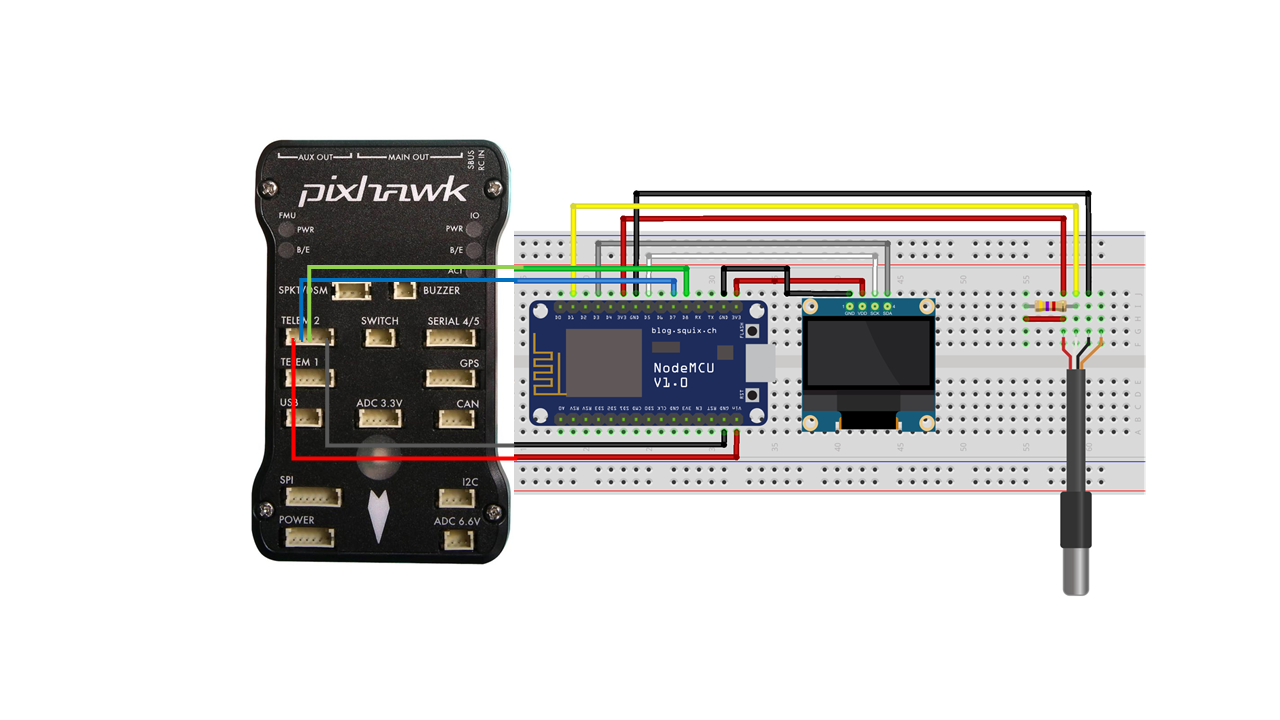
Here's the hookup diagram. Don't forget the pull up resistor for the temperature sensor!
![]()
-
Temperature measurements
08/09/2017 at 01:50 • 0 commentsI did another test run at Heather Farm in Walnut Creek.
Here's links to the data files the boat made:
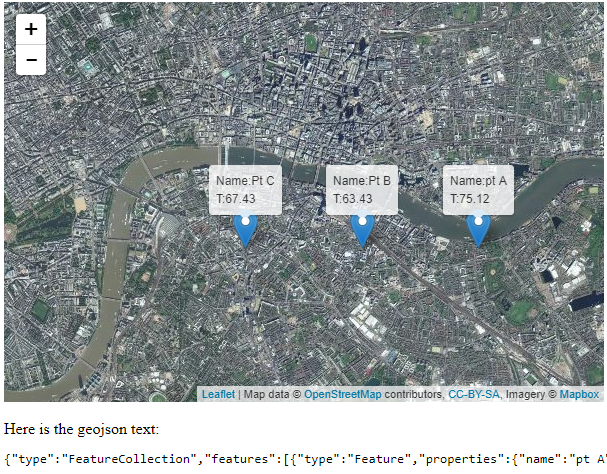
(temp on a map) (csv file) (geojson format)
I still would like the boat to automatically upload the data but it's very easy to access right now.
Things to fix:
- Leaks! I think the hull doesn't leak with 2 coats of epoxy, but the hatch seals and the hatch itself are not fully waterproof. Before I go out into salt water I need more waterproofness.
- Sometimes when the motor comes on it auto mode the ESC is out of sync. Since it's a sensorless brushless motor if the motor does not go the right speed it just vibrates. There are throttle time constants that I will try to adjust.
- The boat leans a lot when turning, and sometimes catches a rail and goes straight. Only when going fast, and if the bow is up enough it is fine. I wonder if a shorter rudder would help or if it's just the v-hull. Maybe I'll print a shorter rudder. I can shift the center of gravity by moving components aft too.
-
Test run with temperature sensor!
07/22/2017 at 00:10 • 0 commentsThis week the boat went back to the pond and actually made some oceanographic observations (took temperature measurements).
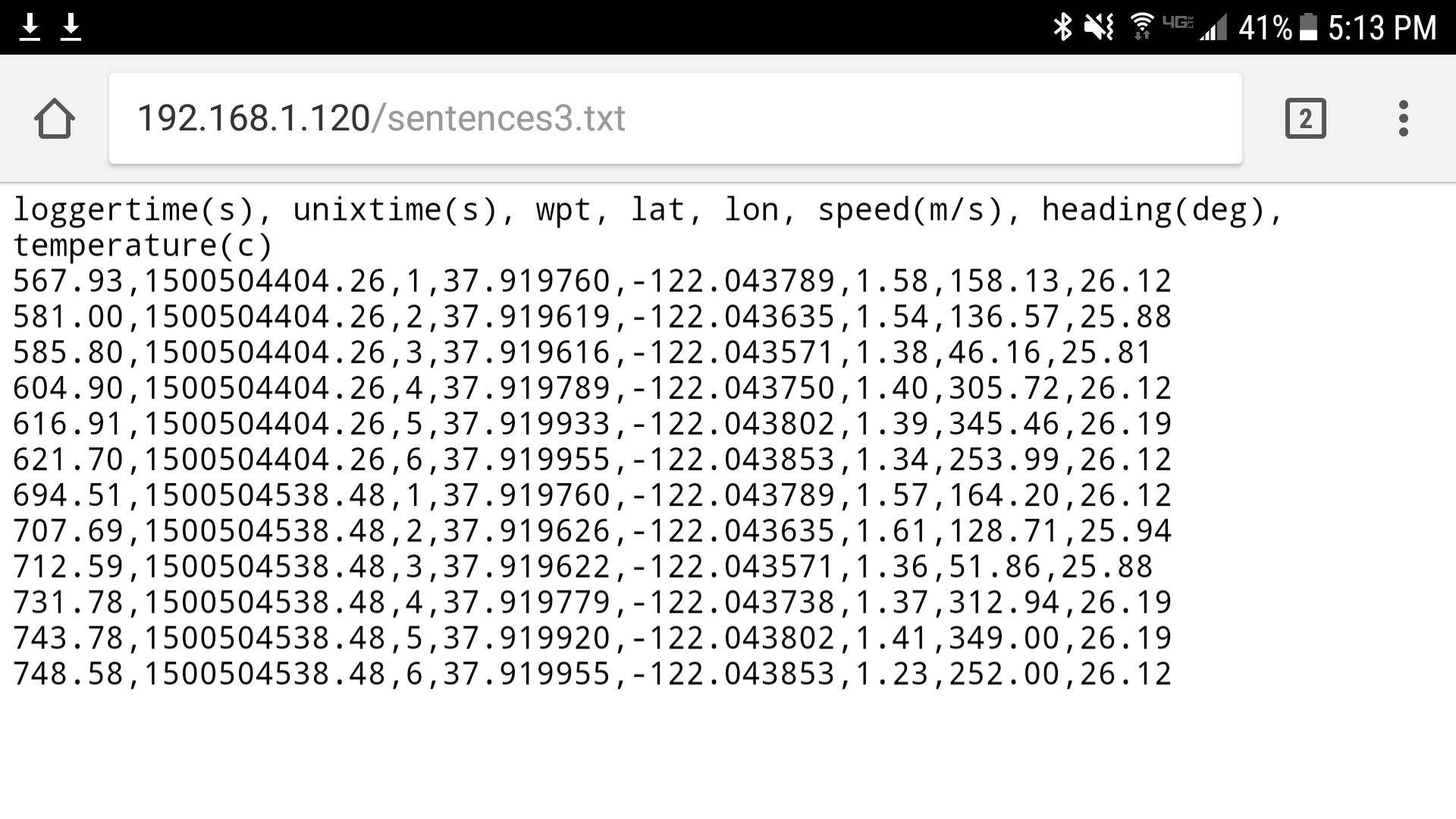
When the boat reaches a waypoint, the payload computer saves position, time, and temperature. From the payload computer web server you can download the data.
I spent quite a lot of time looking into the best way to format the data. I still would like to be able to automatically upload data to a common location and share it on social media, but for now we just have the local web server on the boat.
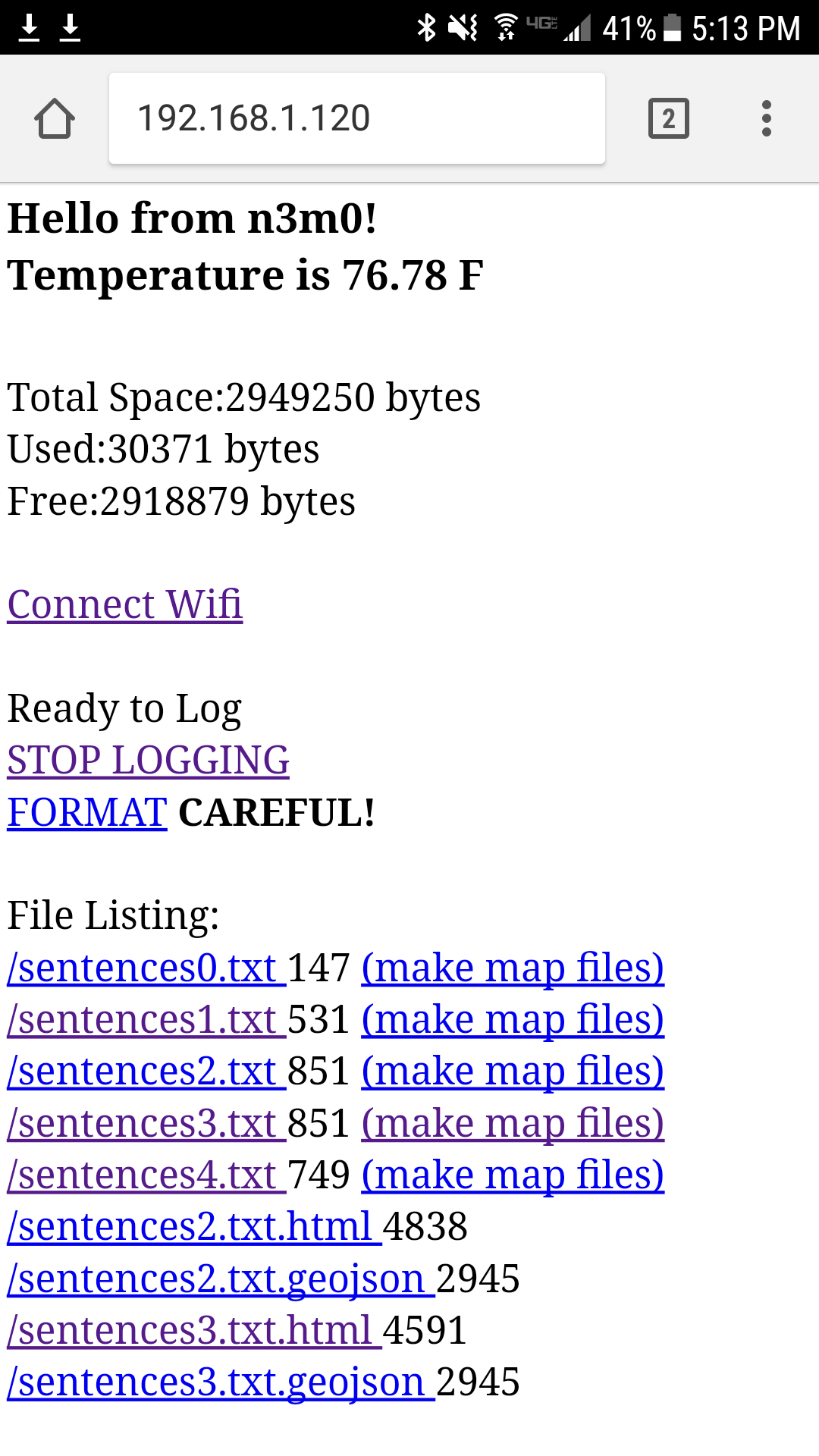
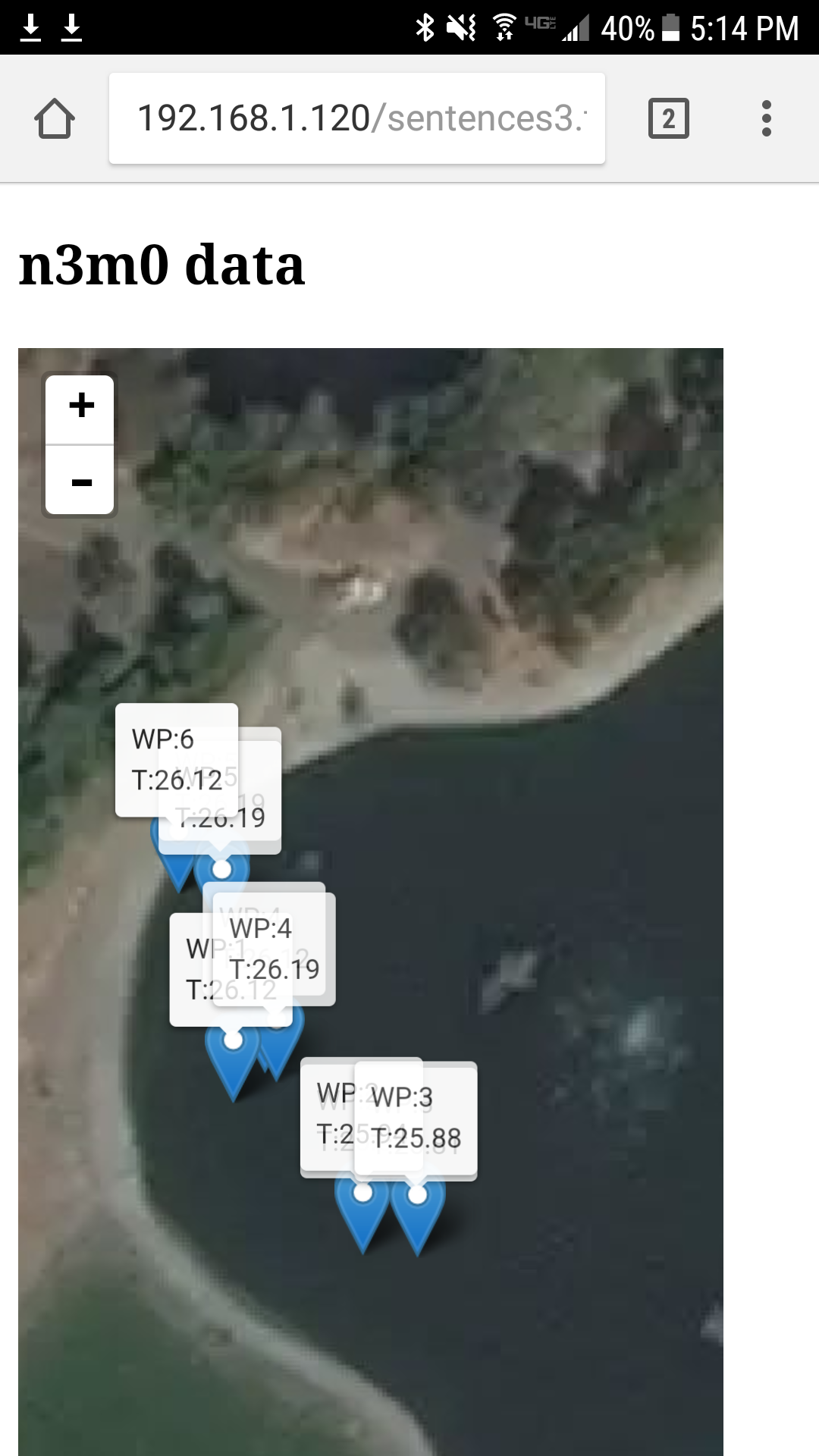
But the interface is pretty good I think. There is a basic web page that shows the files on the payload computer, and you can download them as a csv file or it will create a html page that uses leafletjs to display the measurements. A geojson data file is also created for more mapping options. The web page also lets you enter your wifi credentials, and if no wifi service is found the boat will create an access point and you can connect your phone/laptop/tablet to that.
![]()
![]()
![]()
-
Payload bench testing
07/01/2017 at 23:28 • 0 commentsI want to include a nominal payload in the project so everyone who builds one can do some basic scientific data gathering with n3m0. I decided on just temperature sensing but it would be easy to add more sensors. My hope is that if you bring the boat back to your wifi it will upload data and social media for you...
I'm using an ESP8266 NodeMCU board as the payload computer, a small OLED display, and a DS18b20 temperature sensor. I hooked the serial port up to the pixhawk autopilot so I can get a data feed.
I've got the data saving as a csv file in the payload computer, and a basic web server to manage the files and download them.
I want to also be able to archive the data as a github gist in geojson or leafletjs form, and send a tweet with the link, but am still working towards that. Here is a test generated by hand (screenshot below)
![]()
Here's a picture of the hand-wired board (3d printed enclosure will come eventually!).
![]()
I'll update the description and build instructions once I've tested it on the water.
-
RC control
06/17/2017 at 19:23 • 0 commentsHere's a video of the boat driven in RC mode to show how fast it goes.
-
First autonomous operations
06/17/2017 at 18:37 • 0 commentsWent to Heather Farm park to test the boat. June 15, 2017
First time with a new motor/esc/shaft coupling: working good!
Autonomous mode had major oscillations so I tuned the feedback gains using trial-and-error. Reference to gain information.
- Previous tests had violent yaw oscillations so I started off with STEER2SRV_D = 0 as the boat doesn't seem to need rate feedback in steering. Still slow oscillations but not violent.
- I reduced STEER2SRV_P with little change, still slow oscillations.
- I doubled STEER2SRV_TCONST from 0.75 to 1.5 and this made it way worse! I changed it to 0.4 and it worked nicely to go between two waypoints. The link here said increasing it would reduce weaving but my theory is it added more lag for more weaving, so lower was better.
Here is a video of it going between waypoints. I am using Andropilot for telemetry on the same phone I was filming from, so you can hear the app announcing the waypoints.
n3m0 the autonomous boat
A 3-D printed boat that uses an APM autopilot for autonomous operations. Designed for citizen scientists to make oceanographic measurements.