I decided to go the route of a redesign on a couple of components. It was obvious that the voltage drop in the original voltage regulator was causing the regulator to be a steady 3.3V, especially as the single cell battery dropped below 3.7V. This caused the the ESP to reset occasionally.
I've chosen an Analog Devices buck-boost regulator to replace the AP2112. Yes it costs $1.57 more than something else, but this one has a lot of documentation, and is more likely to work the first time.
After @Ted Yapo commented on my last log, I also realized that the fan motor driver I chose has a high voltage saturation need on the two outputs, limiting the power actually available to the motor itself. I've used fan drivers for other projects and like the simplicity of the part, but I redesigned the board to include an actual brushed motor driver.
I made a square, somewhat spread-out PCB to test the new features, it's an intermediate step before putting all these new parts on the board and having no space to probe.
I sent it off last night to @oshpark's super swift service. It includes:
Tag Connect layout! >> this one I'm really excited about
New buck-boost >> already realized I forgot to put the thermal vias in
New motor driver >> only one, so the the buck-boost won't be getting that hot anyway :)
On-off linear switch (replaces annoying momentary)
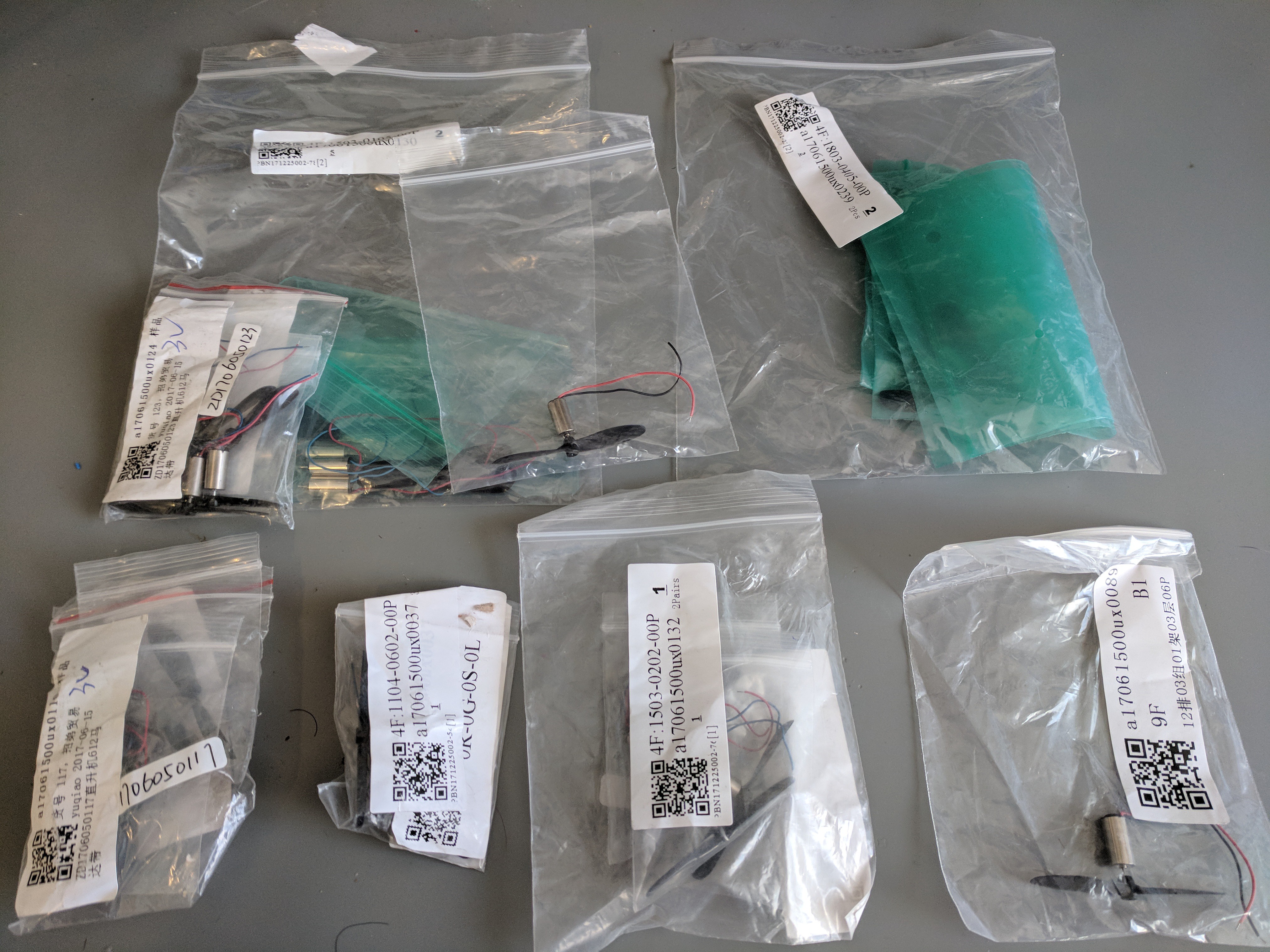
My flight test showed me that my motors didn't have enough lift/ draw enough current/ rotate fast enough. I ordered several motors to test from Uxcell ranging from 13,000 rpms to 40,000 rpms.
All the motors I bought have rpm ratings + voltage, but no kV rating.
Motor kV (the rpm constant, not kilovolts) is the relationship between rpm and generated back emf (force). It's defined as the number of revolutions per minute (rpm) that the motor will turn when 1V is applied to the motor with no load. So rpms/ volt.
A low kV (more winds, thinner wire) will have higher volts/ less amps/ higher torque so it can swing a larger propeller.
A high kV (less winds, thicker wire) will have low volts/ higher amps/ lower torque for swinging a smaller propeller.
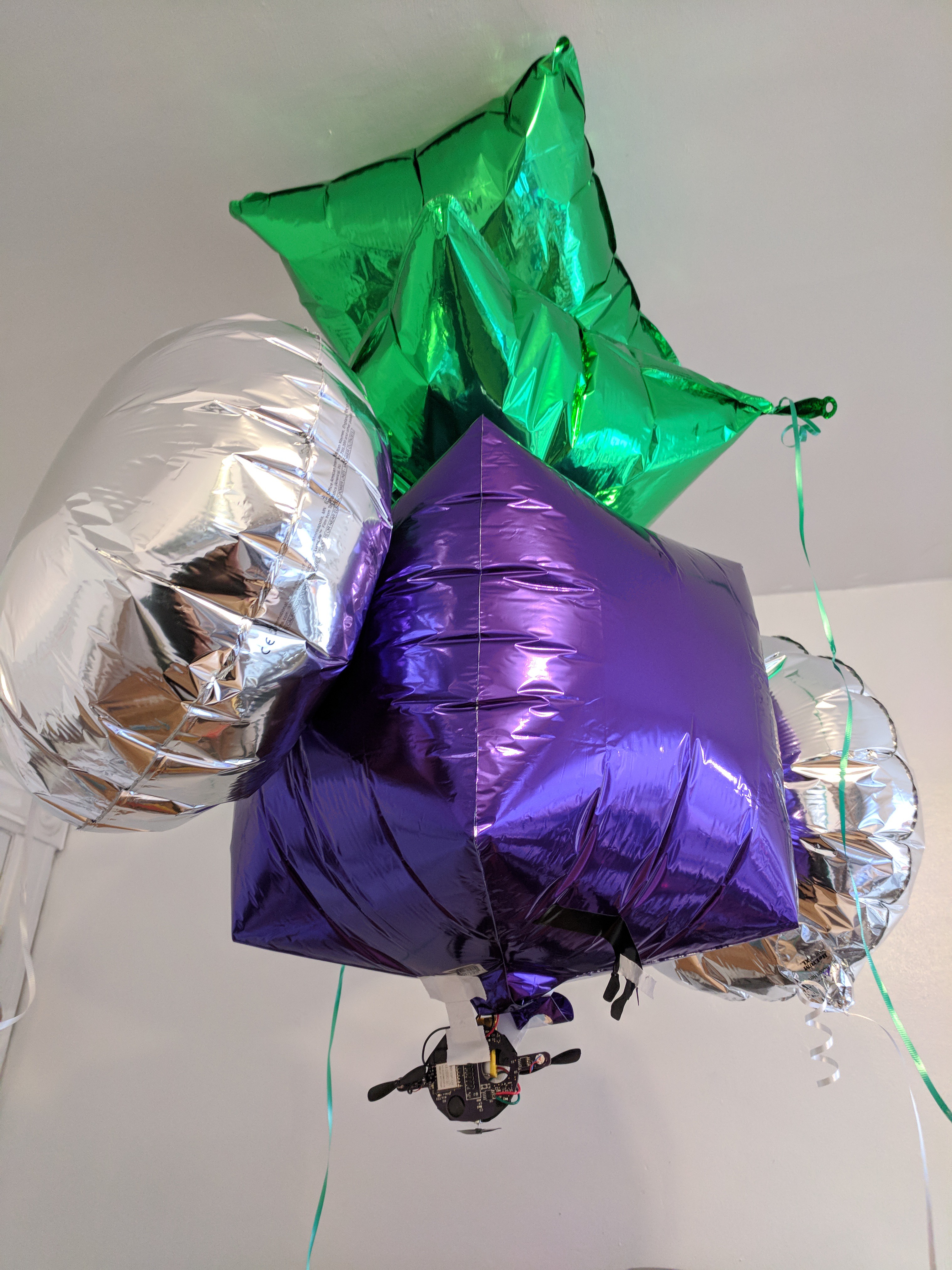
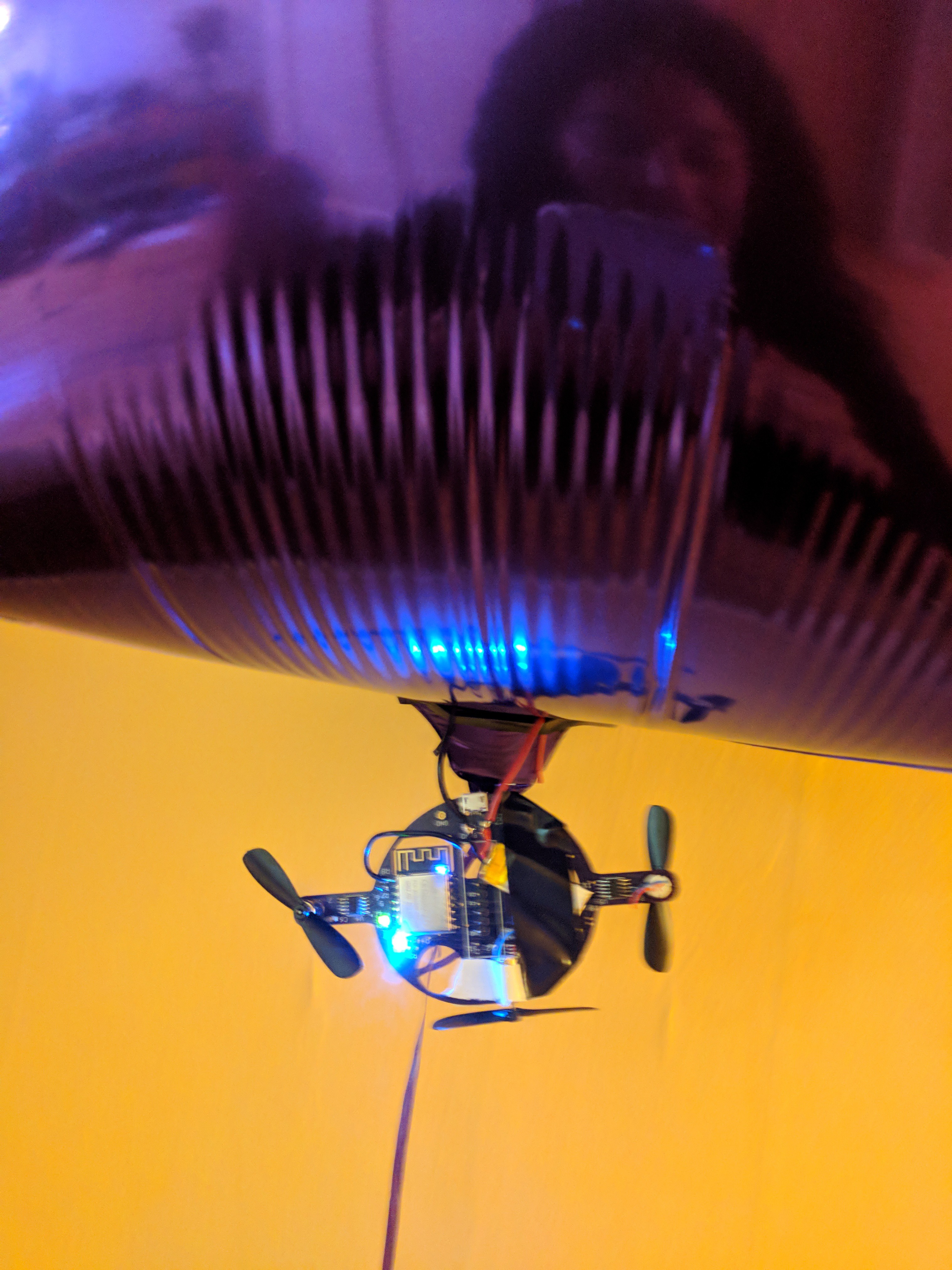
The blimp is working a lot better. The motors are just not fast enough, nor are the propellers moving enough air to make enough of a difference. I put a 500 mA battery on it which is why now there are 5 balloons needed to hold it up :/ (I am afraid to weigh the gondola now).
Tonight I got all the motors working and attached the blimp's gondola to a big purple cube filled with Helium.
There it is! The blimp sort of hovers and falls at the same time despite the motors turning as fast as they can. You can barely feel any lift from the poor little things! I've bought a lot of motors from random places, so now it's going to be time to figure out the right one with the right propeller.
The motors I'm using pull 230 mA at max speed. The drivers I'm using spec a max of 70 mA, although I'm pulling 110 mA (and no heat, maybe I'm misreading something?).
I think the main problem is the battery though. It's one cell, 105 mA, so it just doesn't have enough ooomph. I also haven't measured the inrush current yet... could be that it's just killing the battery in one short second.
Next steps:
Define best possible scenario for battery + motors (GAINING WEIGHT NOOOO)
Order new motors
Revisit motor drivers
Add 2 momentary buttons to controls for up/ down (save joystick for forward/ reverse/ left/ right)
Today I connected a Feather (Adafruit's HUZZAH + some other niceties) with a giant red joystick. The joystick switches ON-OFF via 4 microswitches rather than proportional movement. That's OK, the motor drivers I've started out deliver an ON-OFF signal as well. All 4 switches work and have been tested using the onboard LED on the ESP8266 (on the HUZZAH).
Working on making one ESP8266 (connected to joystick) talk to the other ESP8266 (connected to motors + blimp). Found a project on Instructables to get started with. Now the motors are controlled by joystick :)
There's some massive lag here, not really sure why.
Rev 3 arrived from Oshpark, and most of the hardware issues are fixed.
I've had so many comments on how to cut some of the weight- thank you!
From your suggestions, I've removed the PCB under the antenna, saving a couple of grams. Great idea!
I've chosen to keep the battery charging on the PCB. In the final piece, there will be a lot of fast changes and I hate swapping batteries while *doing*other*stuff*. Those tiny battery connectors are a total PITA. A really good idea, but no :)
PCB changes in this rev:
ESP footprint fix
New micro USB part with legs that grab into the PCB (thanks to @Voja Antonic for this hint)
Larger diode that I can see the cathode end (picked one that is way too large, it's in the top left next to label C1 :)
Battery off switch, which is the wrong part
PCB cutout under antenna
Net: 19.1 grams with everything on the board is exactly 3 grams too heavy. I think this is OK, the programming header won't need to be there in the final (-1.2 grams) and there will likely be some other reduction.
Changes for next rev:
New ESP (ESP-M2 or ESP8285)
Pogo pin fixture
Slide switch for battery OFF
Capacitor footprints should be the same (nitpicking)
The blimp board that combines ESP, motor controllers, and battery charging is here!
I assembled this in a few off hours before Supercon without the tools that I'm used to. Tried out a hot air gun for assembly for the first time and I really liked it for removing misplaced components. I think I'll stick with my pancake griddle for faster assembly though :)
You can see (green area) where I ripped the USB port off the PCB and the traces too... a friend fixed it by adding a piece of the board he was working on to mine. <3
I am going to redesign using a micro USB with legs so it doesn't fall off.
Also, the board is a bit overweight, but only by a few grams. I will have to see how I can reduce.
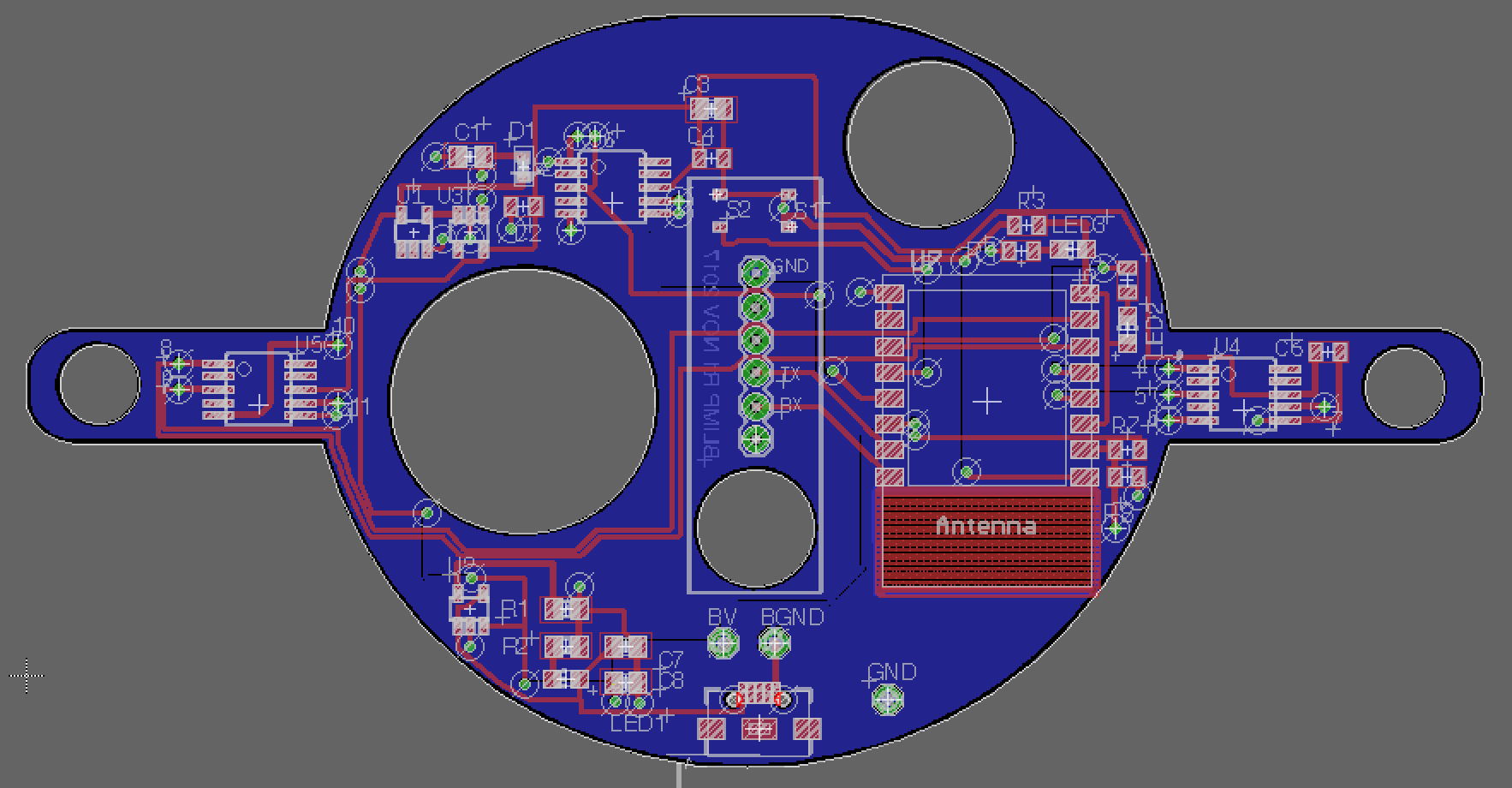
Here's a rendering of the new design. Might lose some of the diagnostic LEDs before sending it out. (Yes, I lost 2 LEDs before sending it to @oshpark ).
Not really sure the best way to layout the ESP-12S...is the antenna in an OK place?
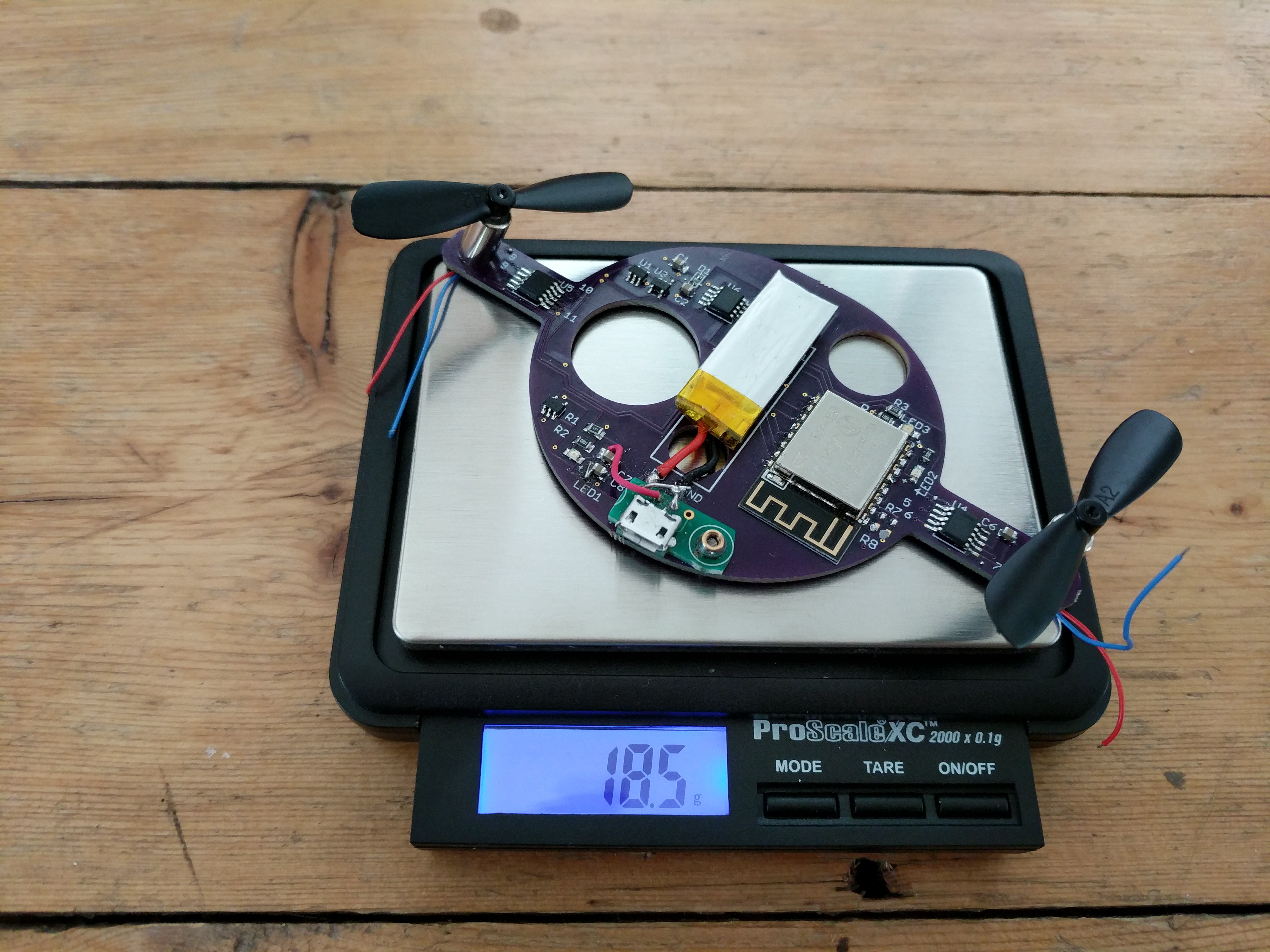
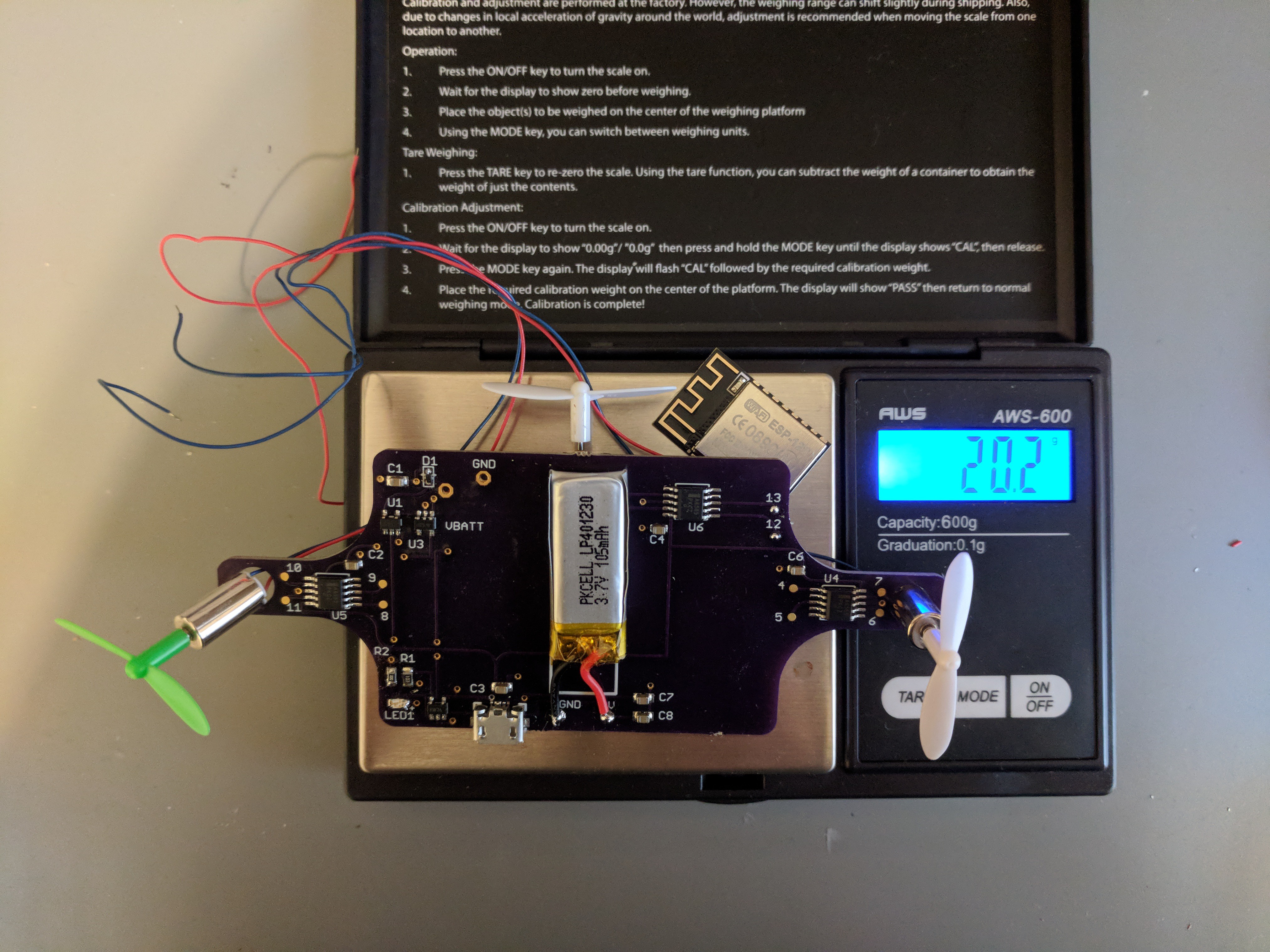
I am in an extremely good mood. The board works with only one minor (haha) issue.
It's overweight at minimum by 6.2 grams. For the volume of helium I'm thinking about using, the gondola can weigh no more than 14gr.
I did the super swift service from @oshpark - ordered on Monday, had boards back on Saturday. Boards look nice, I'd forgotten to put in a pull up resistor (charge light doesn't light) and there's that weight issue, but otherwise, pretty happy. The ESP8266 is not designed in yet, it's just on the scale to be weighed.
NEXT REV:
Shave ~6 grams off of PCB.
Investigate diode on Vreg (drop is too high)
Add pull up resistor to PIN CE
Make connection points for batt and motors thru-hole
I'm looking at propellers today. I've sourced a tiny DC motor, which I'm running without proportional controls because I cannot tell the difference in speed at 3.3V. Also the motor driver I chose allows only for ON/ OFF operation. Seems like proportional controls give extra complication without much benefit.
Hobby propellers have two markings, the first one is the diameter size that it makes while spinning, the second one is pitch.
The pitch controls the speed of the propeller. A higher numbered pitch means that the blade cuts faster into the air, and moves the aircraft faster.
The following is taken from RC Airplane world: the two arrow lines represent the path of each propeller tip. You can see that the higher pitch prop (eg 10x8) takes only one and a half turns to cover the same distance that the lower pitch prop (eg 10x4) takes 3 turns to. So, with both engines and props spinning at identical RPM, the higher pitch prop will travel further in the same amount of time - hence a faster flying plane.
Thrust is the force needed to push the blimp through the air. The diameter of the propeller is related to this. The larger the diameter of the propeller, the slower the motor will run, the harder it will work, and more thrust will be created.
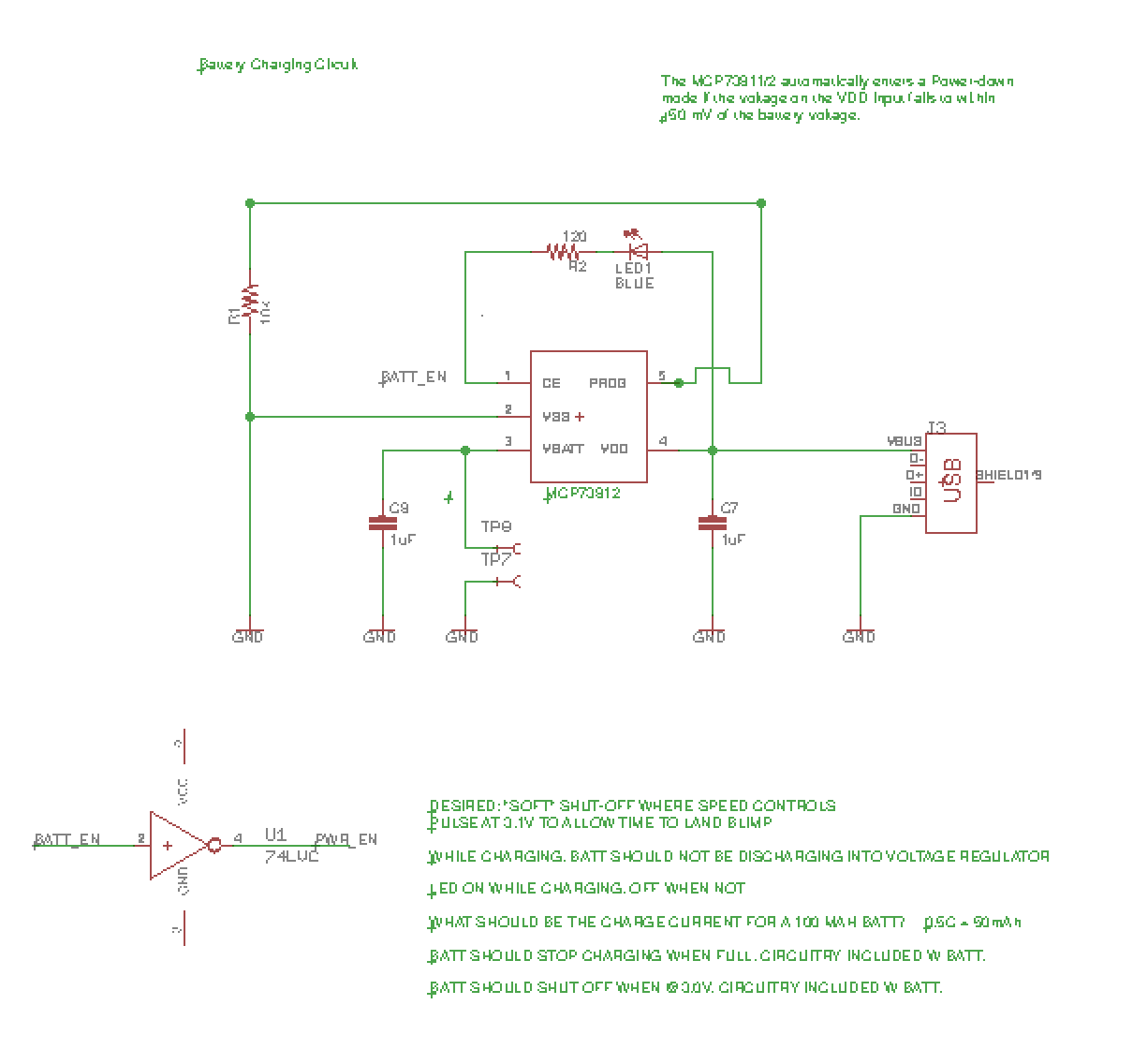
I've decided to keep the battery charging on the blimp's gondola itself rather than dealing with pulling the battery on and off each time. I dislikeJST-style battery connectors.
After leaving the battery on charge to test the circuit overnight, I discovered that this morning, the 1-cell 3.7V Li-ion battery was at 2.8V. !!!!!!
Update: while charging, the rest of the circuit was on, so the motor was on all night. In the next rev, I've fixed that.
 Sophi Kravitz
Sophi Kravitz