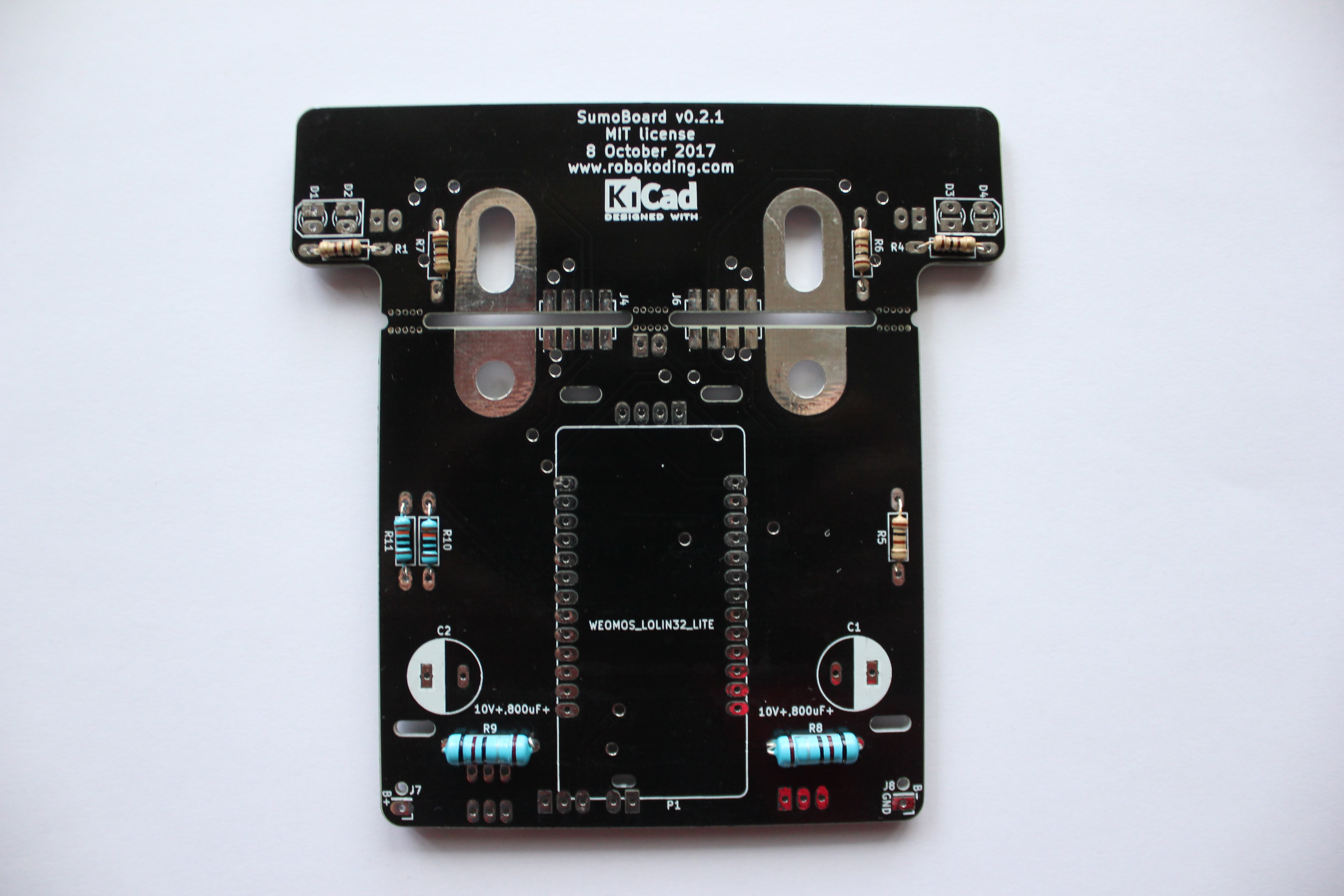
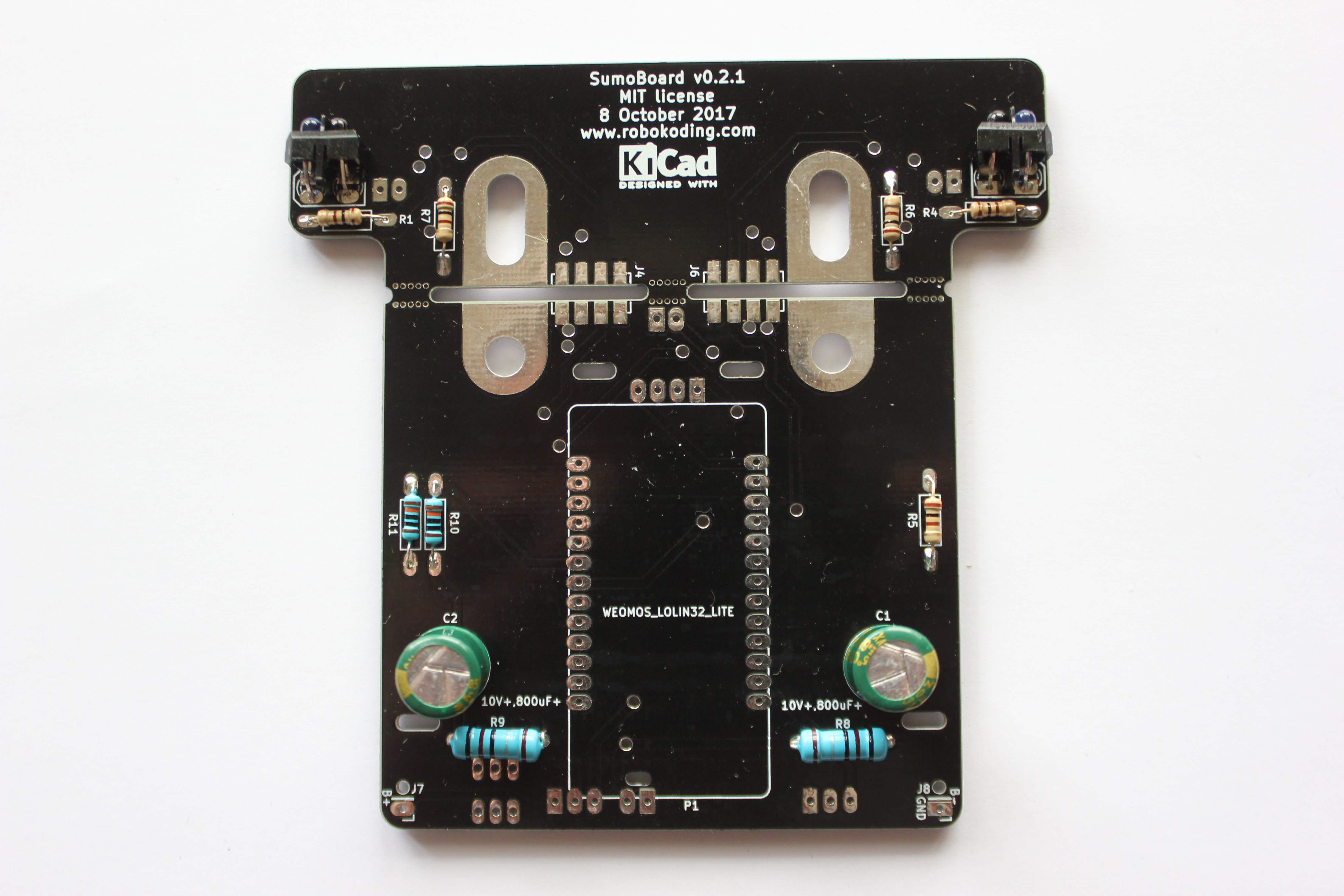
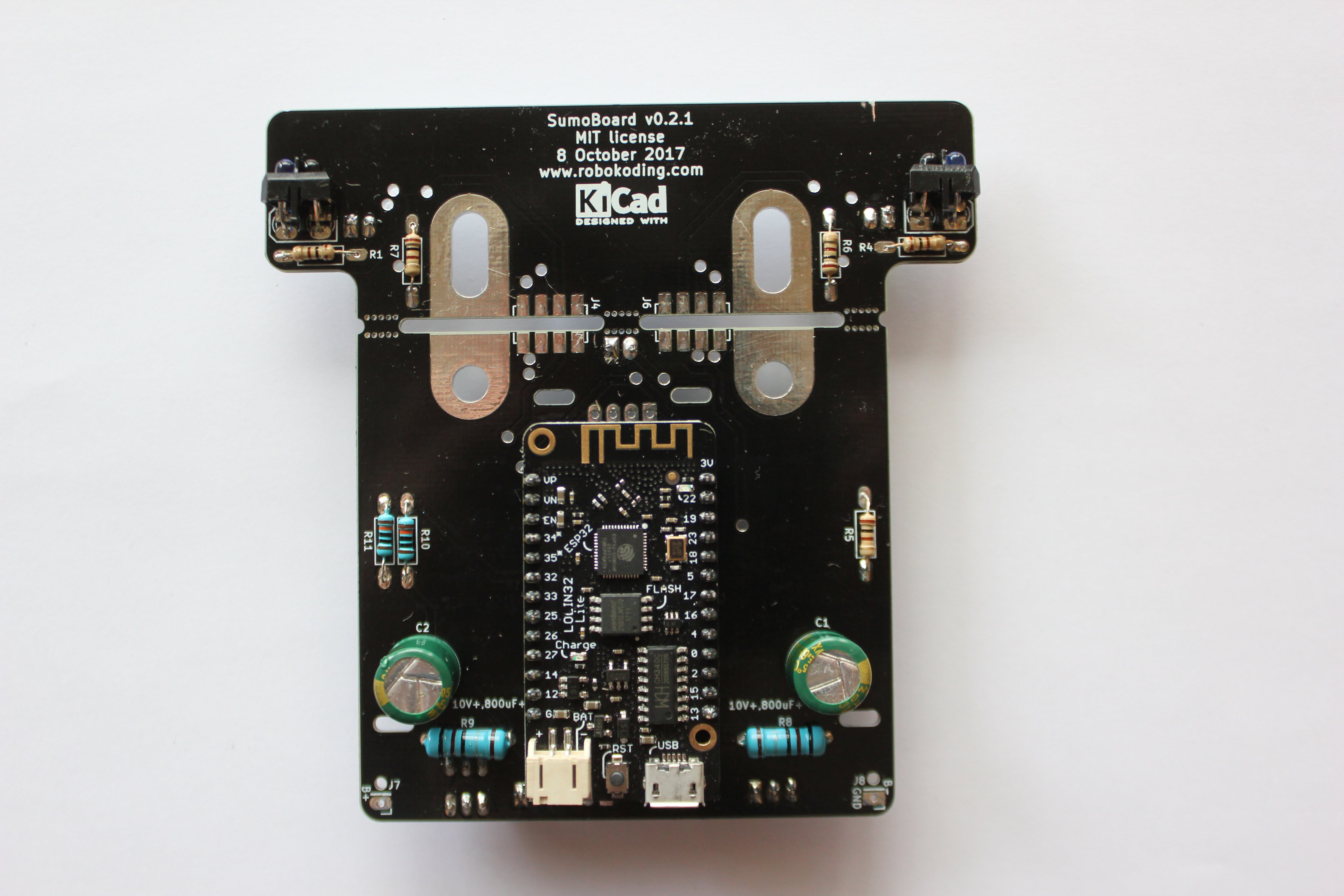
It is probably easiest to place the resistors and solder them one by one. Bend the resistor legs 90 degrees and place them trough the SumoBoard. The resistors don't have polarity, you can place them any way you want.
BUG: The holes for the big blue resistors are a bit narrow (will be fixed in the next version).
Once the resistor(s) is(are) in place, try to hold it in place with your finger (or keep the SumoBoard pushed against the table) and turn the SumoBoard around to solder the resistor from the other side and cut the remainder of the resistor legs.
TIP: For best soldering results preheat the resistor leg and the pad with the tip of the soldering iron few seconds before and then apply solder wire. Add enough solder wire to make a mountain around the resistor leg and then remove the solder wire and leave the solder iron tip for few seconds on the pad. Then remove the solder iron and you should have a nice shiny solder connection.
2
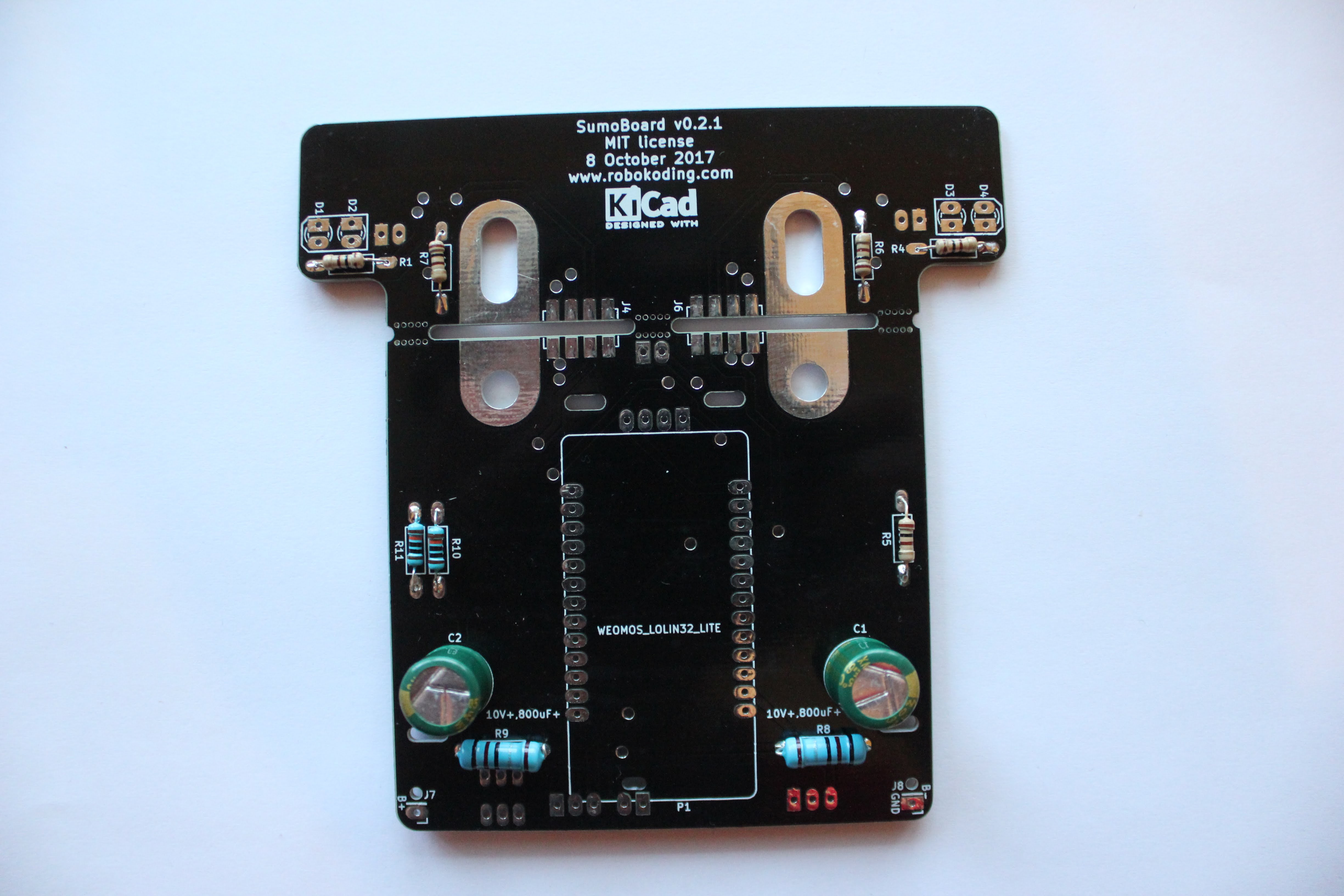
Solder the capacitors
The 2 green cylinders are the capacitors. On one side of the capacitor body there is a yellow/brown side with stripes. The capacitor leg with the striped side goes into the SumoBoard hole which is surrounded by a white half circle under the C1 and C2 labels. Place the capacitor and solder them one by one.
BUG: Try to leave some space between the SumoBoard and the capacitor. So that the capacitor doesn't touch the SumoBoard. This makes one of the coming steps easier. This is a bug and will be fixed in the next hardware version.
3
Solder the phototransistors
The phototransistors are the dark blue and black LED combined with the black chassis. Here again the polarity is important, so mind the white drawing on the SumoBoard to see which way they go to the holes of D1, D2, D3, D4. The cut corners of the phototransistor go towards the edge of the SumoBoard, so that the dark blue LED is closer to the edge of the SumoBoard. Solder the phototransistors one by one.
4
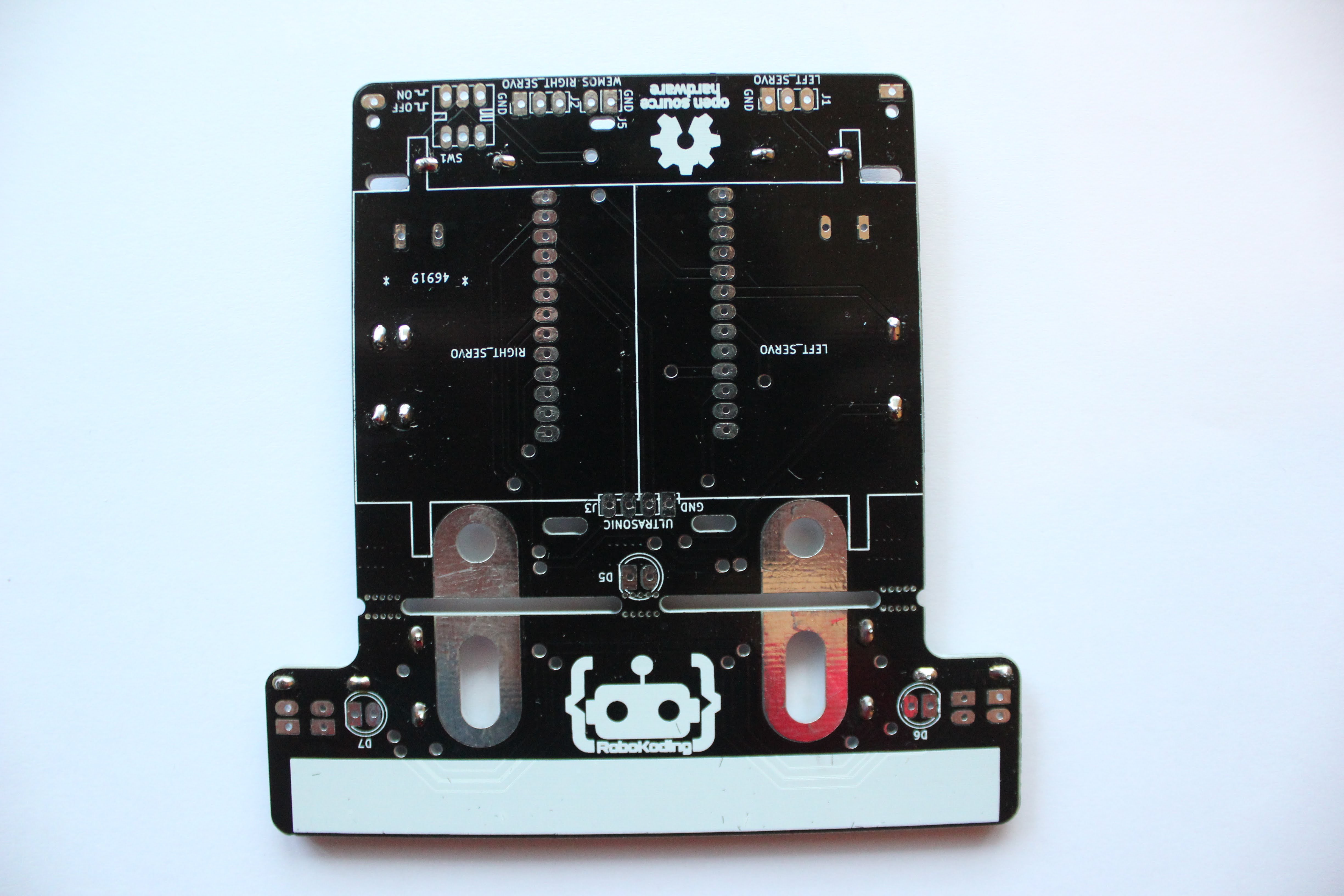
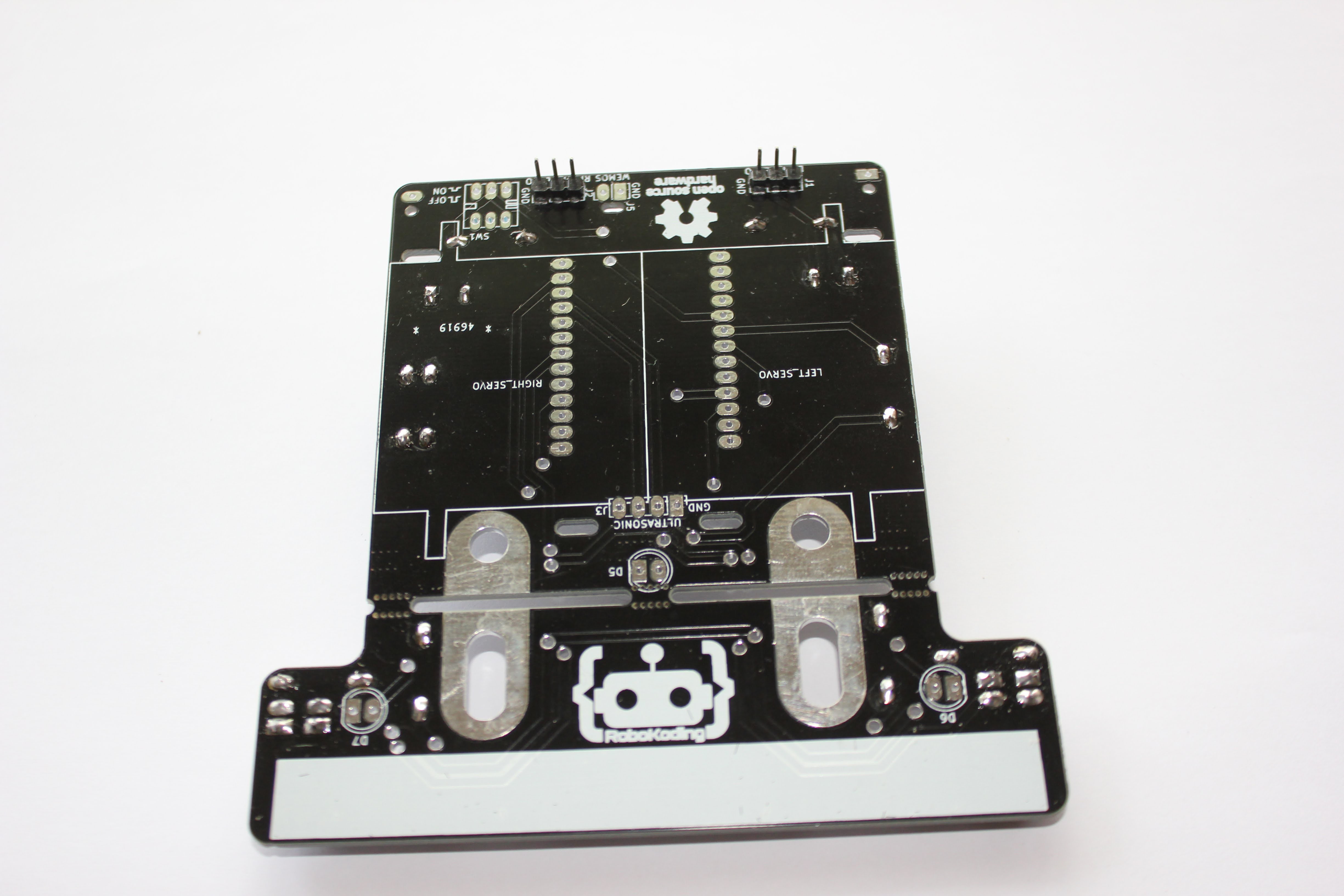
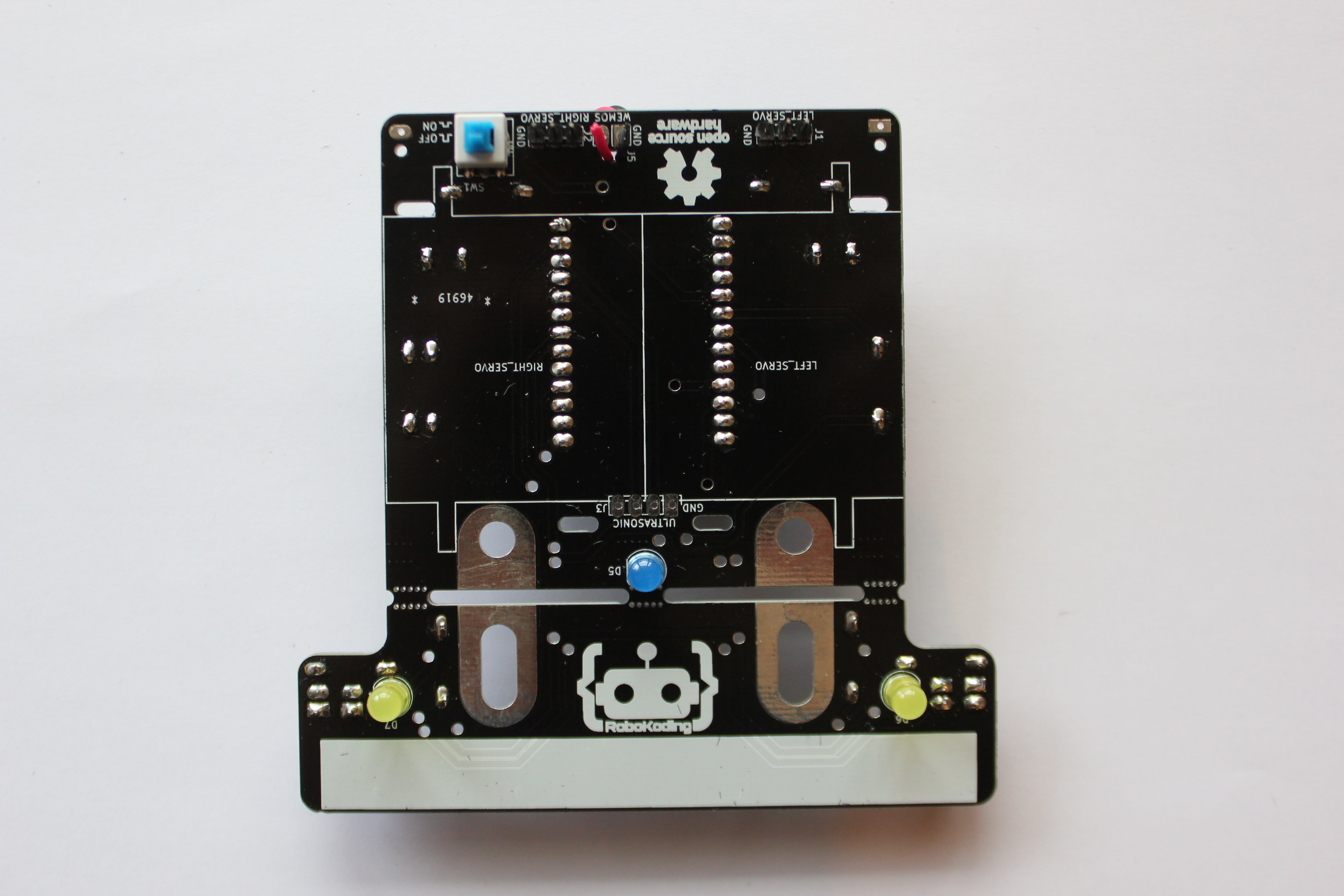
Solder the Servo pin headers
The 2 pin headers for the Servos go to the holes with labels LEFT_SERVO and RIGHT_SERVO. Place the pin header and solder one of it's pins first. Then try to align the pin header while reheating the previously made solder connection.
5
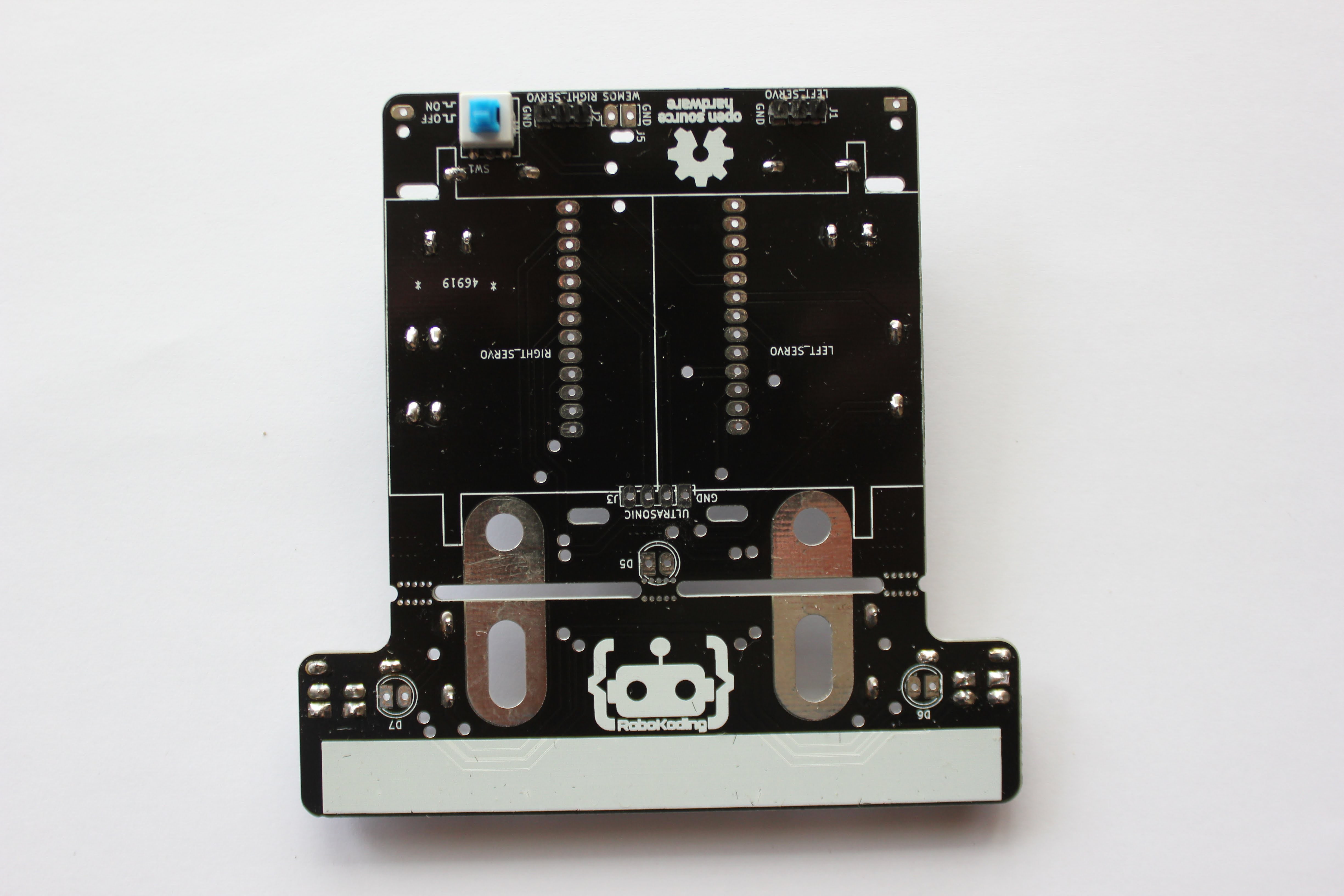
Solder the push button
Put the push button in the SW1 labeled holes. The polarity is important again, check the sides of the button, they should match with the drawing on the SumoBoard. There are 2 rectangles and a single rectangle, they should match with the ones on the push button.
6
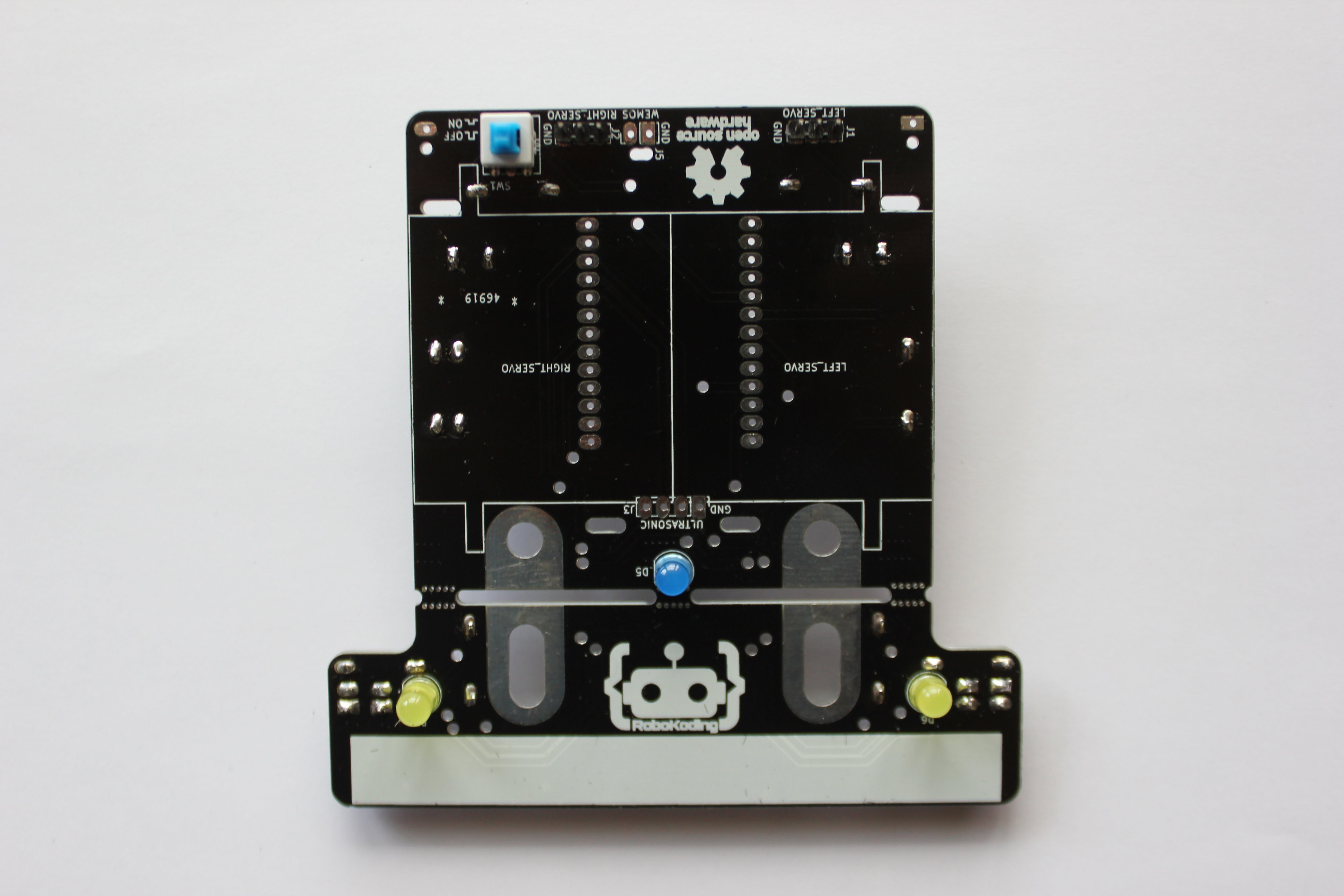
Solder the LEDs
The D5 is the blue LED and D6 and D7 are yellow. Be aware of the polarity again. One side of the LED is cut a bit like marked on the SumoBoard. The shorter leg of the LED goes into the hole with a rectangular pad of the SumoBoard.
7
Solder the microcontroller
Put the 13 pins long pin headers into the microcontroller and also 13 pin long sockets. Then solder the pin header to the microcontroller and the socket to the SumoBoard.
8
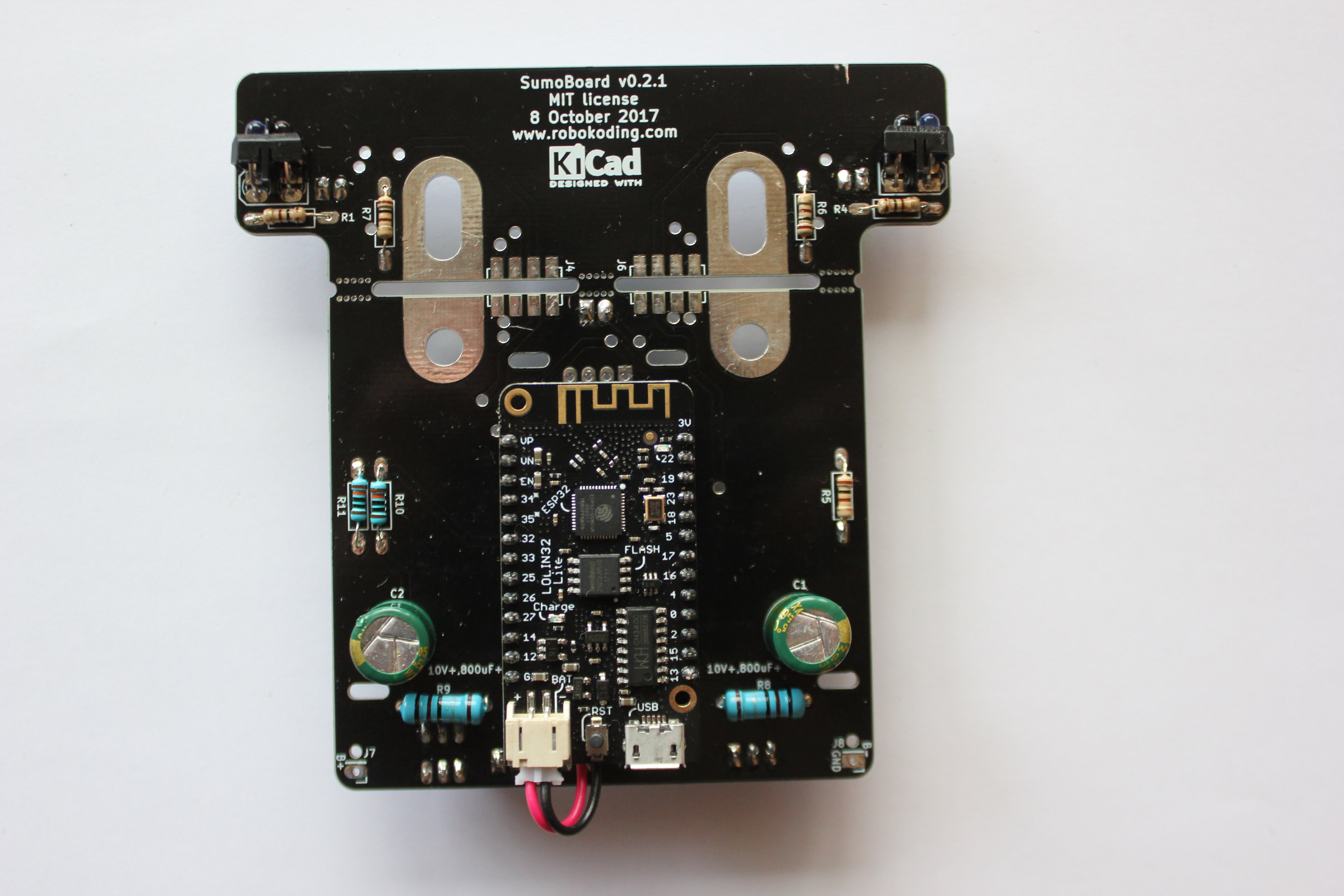
Solder the microcontroller power cable
connect the power cable to the microcontroller and put the wires trough the hole under the microcontroller trough the SumoBoard small hole. Then bend them 180 degrees to go into the holes labeled WEMOS J5 and solder them into place.
9
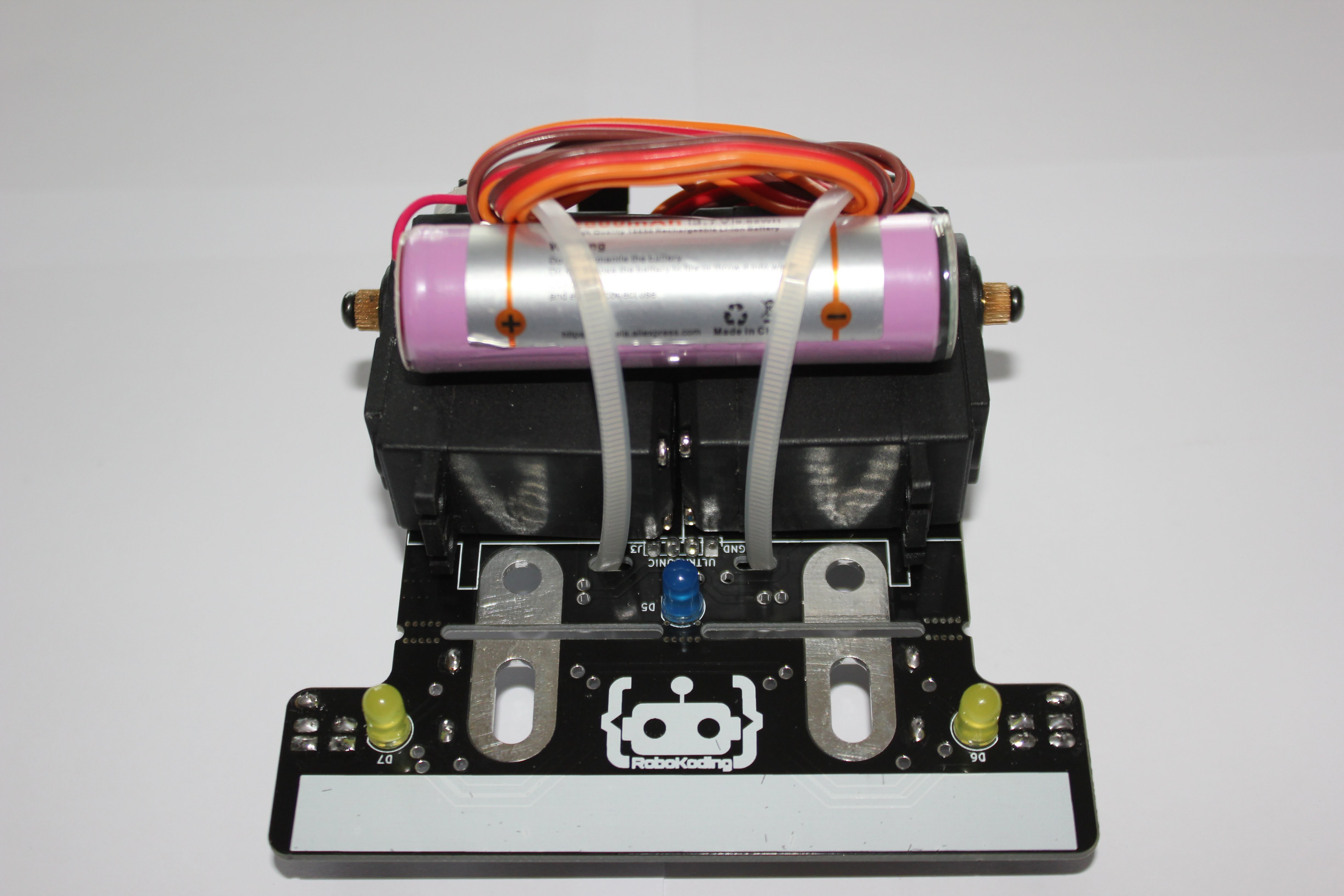
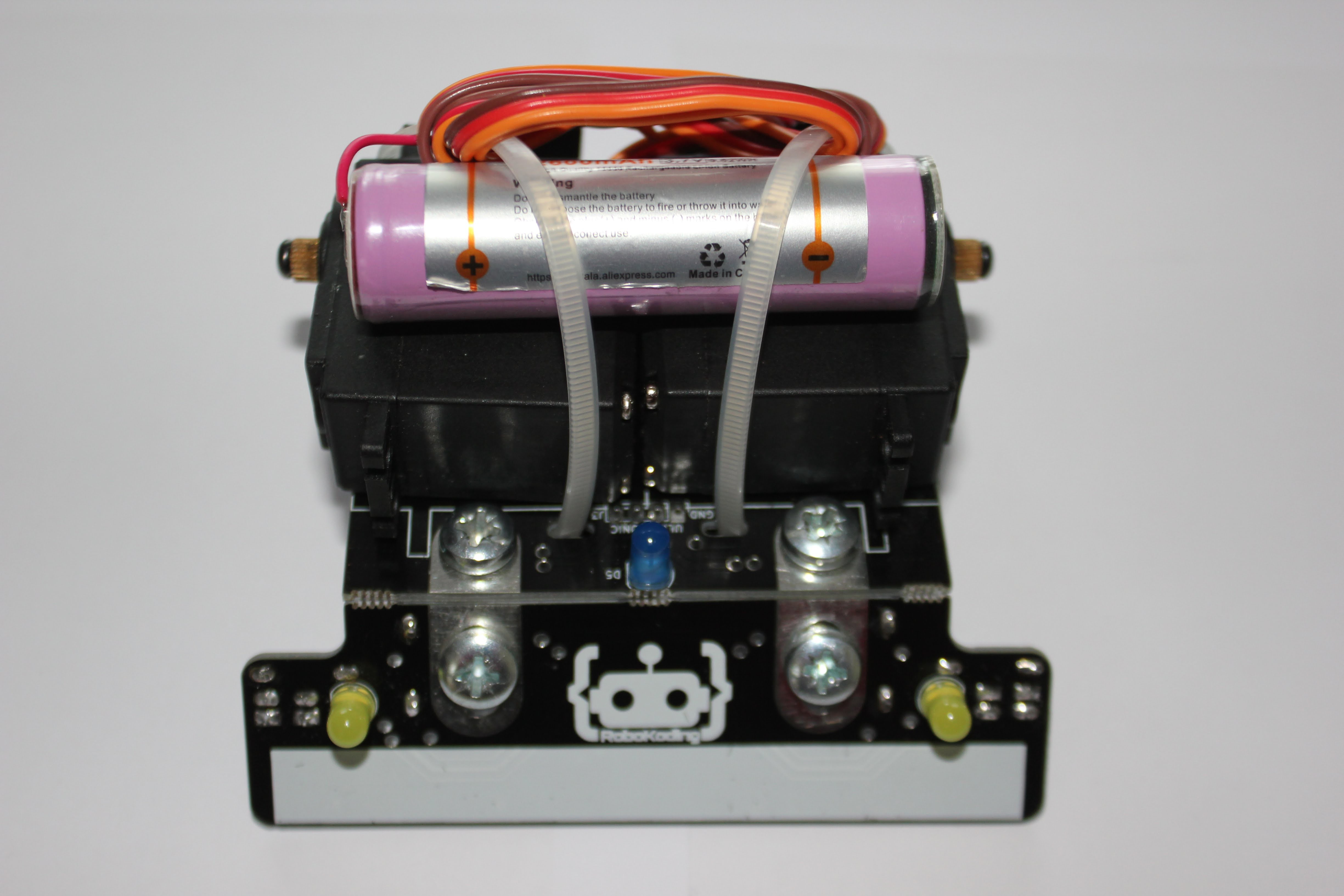
Place the Servomotors and the battery
First try to put the zip ties into the holes, above and below the LEFT_SERVO and RIGHT_SERVO rectangular markings. The zip ties are supposed to go diagonally across the Servomotors. Put the zip ties loosely just enough to lock them in place. The zip tie should go a little under the capacitors under the robot if possible.
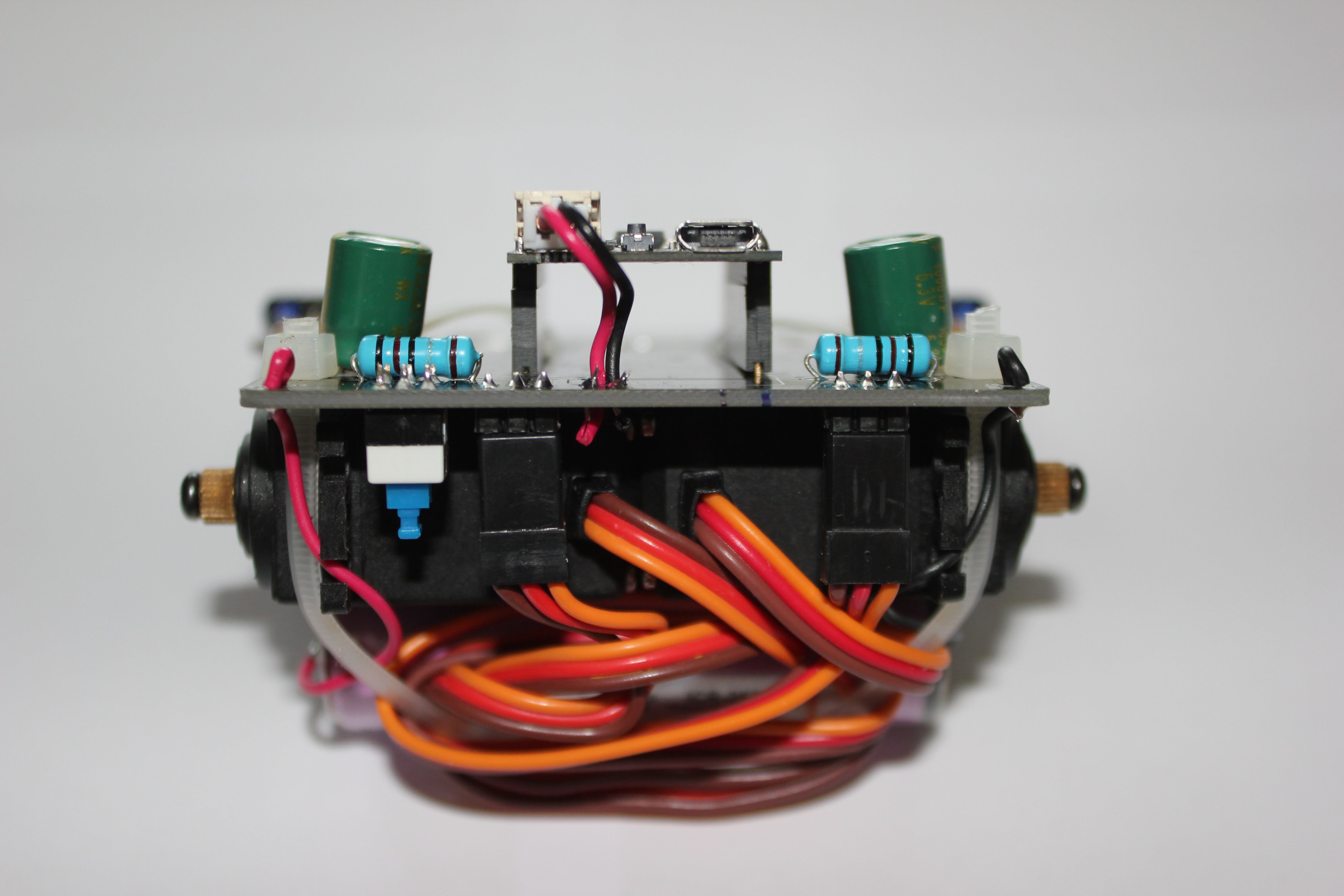
After that place the Servomotors on SumoBoard on top of the labels LEFT_SERVO and RIGHT_SERVO. The gear that sticks out from the motor goes towards outside of the SumoBoard. The Servomotors cables should go towards the back of the robot, where the open source hardware logo is. Once the Servomotors are in place, put the battery on top of them so that the red wire is closer to the push button and then pull tight the zip ties and cut them.
Wrap the Servomotor cable around the zip ties so it doesn't float around. Plug in the Servomotor cables according to the LEFT_SERVO and RIGHT_SERVO pin header connectors, the brown cable facing right if looking from the read of the robot. Brown cable facing the GND label on the SumoBoard.
Finally place the red and black wire from the battery from top trough the SumoBoard holes to connect them to J7 and J8. Bend the cables into the holes and solder them.
10
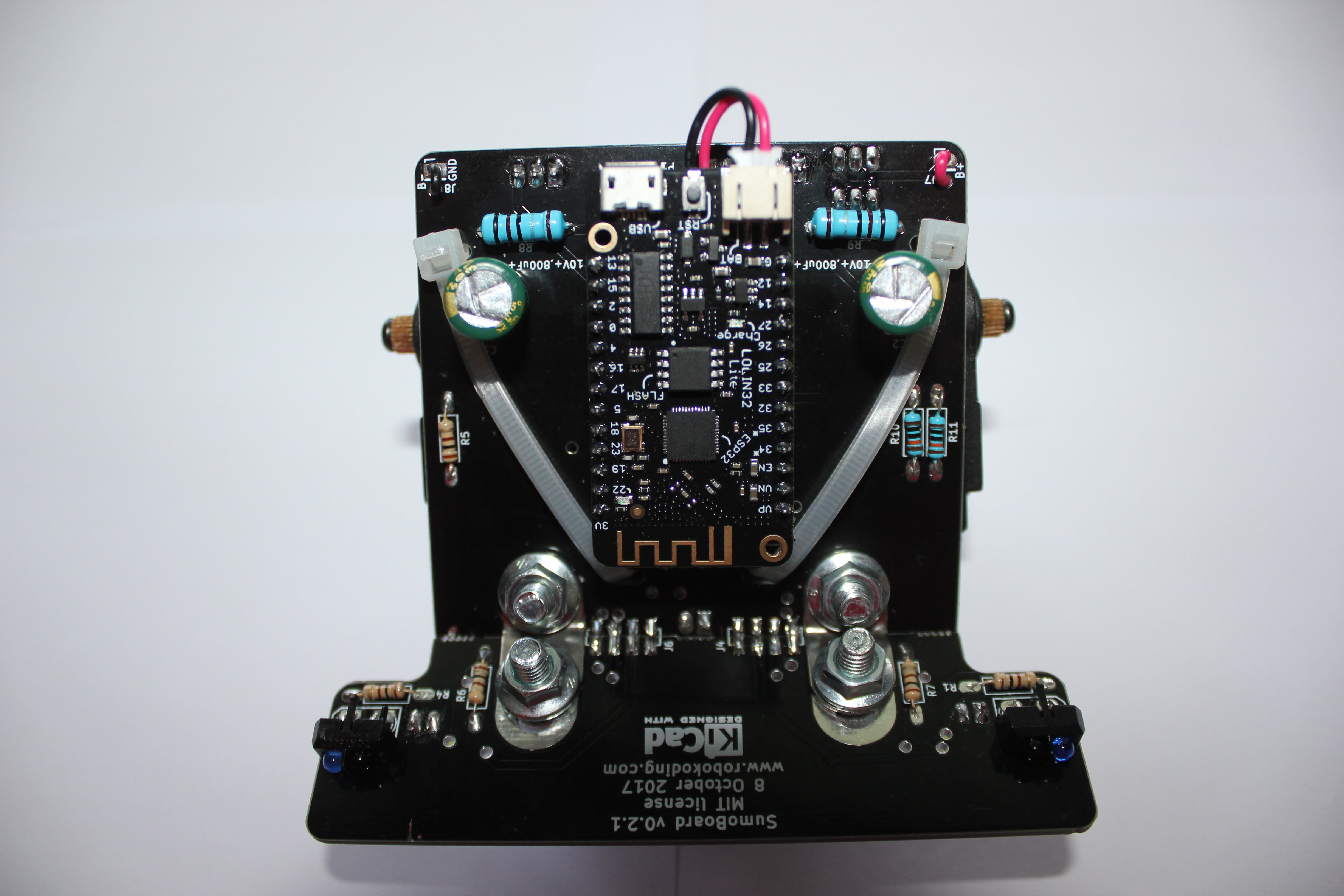
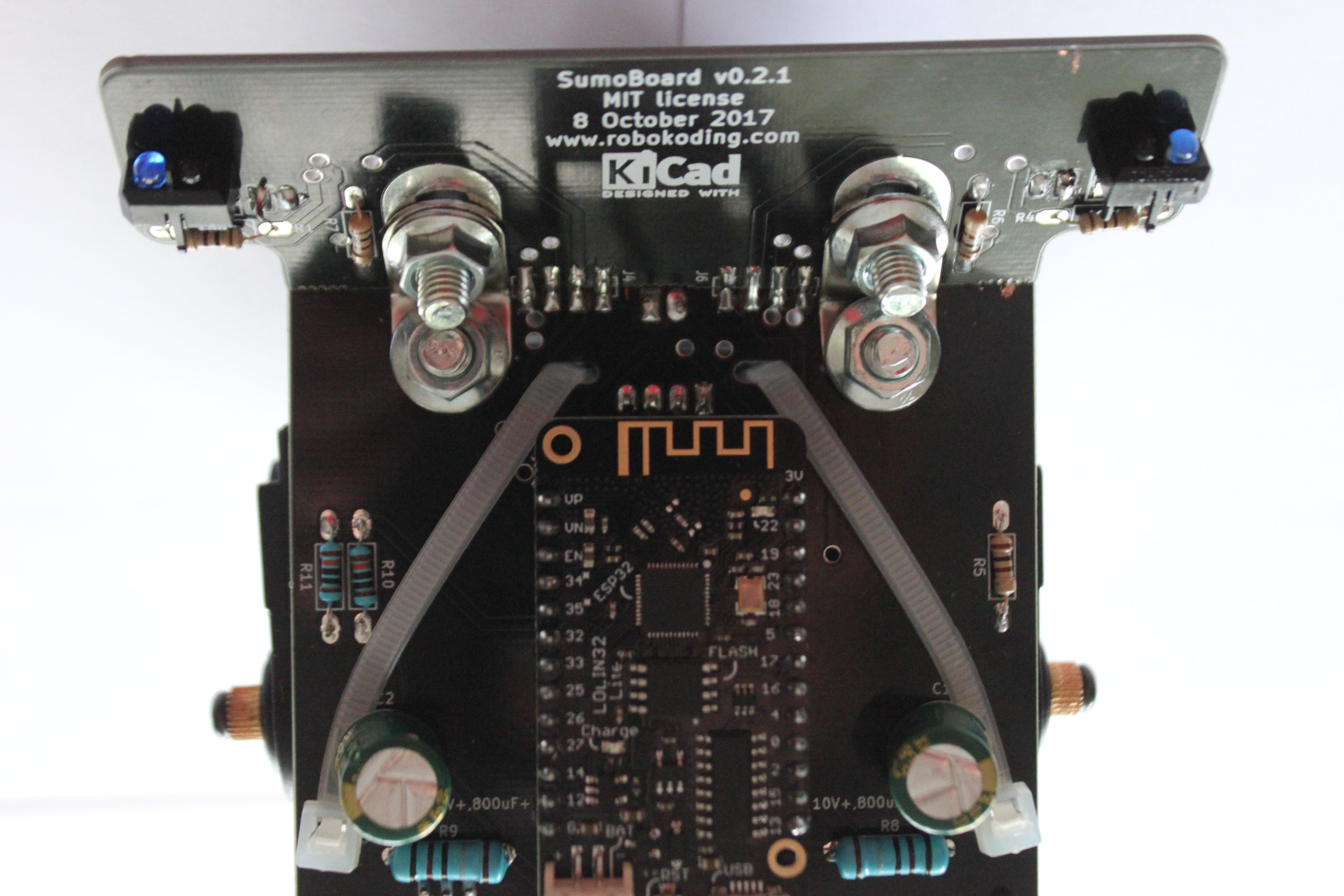
Solder the plow
Break off the plow part of the SumoBoard and clean the mouse bites with pliers. Then find the brackets and unscrew the bolts from them. Place the brackets under the SumoRobot to connect the plow and the 2 parts of the SumoBoard.
Put in the bolts and screw them together with the nuts tight so that the pads underneath the SumoRobot stay aligned and as close to each other as possible. Then solder the connection points under the SumoRobot. Make sure the soldered connection points don't touch the metal brackets.
 RoboKoding LTD
RoboKoding LTD

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.