Boian Mitov
Boian Mitov-
Making an ESPcopter Altitude Indicator
08/14/2019 at 14:58 • 0 commentsIn this project, we will make an altitude Indicator using a NeoPixel shield. NeoPixel LEDs will turn on according drone altitude up to the 1 meter. The first four LEDs will be light green, second four LEDs light blue, and third four red.
ESPcopter is currently crowdfunding with differing reward levels available depending on the expansion boards and quantity desired.
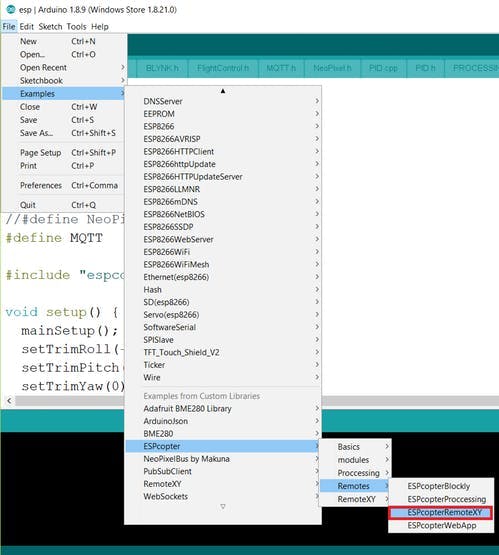
1.) Open the ESPcopter RemoteXY control code
![]()
2.) Check the standard control code
#define REMOTEXY_WIFI_SSID "ESPcopter" //ESPcopter Wiffi name #define REMOTEXY_WIFI_PASSWORD "12345678" //ESPcopter Wiffi pass #define REMOTE_XY_REMOTE // control method #include <espcopter.h> // ESPcopter lib void setup() { mainSetup(); // main settings setTrimRoll(0); setTrimPitch(0); setTrimYaw(0); } void loop() { mainLoop (); // main loop }3.) Edit the flying code by using SDK
3.) Edit the flying code by using SDK
SDK: http://espcopter.com/wp-content/uploads/2016/09/ESPcopter-SDKEnglish.pdf
We will use NeoPixel commands and altitude hold commands.
![]()
![]()
NeoPixel control code:
int altitudeDrone = constrain(round(getOtoMeasure()/45),0,12); // get drone alttitude and convert it milimeter to integer 0-12 for(int i =0; i < altitudeDrone; i++){// for loop for switching the leds on if(i < 4){ // if altitude of drone is lower than 40cm ESPsetPixel(i,0,255,0); // on green 0-4 } if(i >= 4 && i < 8 ){ // if altitude of drone is between 40cm and 80cm ESPsetPixel(i,0,0,255); // on blue 4-8 } if(i >= 8 && i < 12){ // if altitude of droneis between 80cm and 120cm ESPsetPixel(i,255,0,0); // on red 8-12 } } for(int i =11; altitudeDrone < i; i--){ // for loop for switching the leds off ESPsetPixel(i,0,0,0); } ESPpixelShow(); // commint#define REMOTEXY_WIFI_SSID "ESPcopter" //ESPcopter Wiffi name #define REMOTEXY_WIFI_PASSWORD "12345678" //ESPcopter Wiffi pass #define REMOTE_XY_REMOTE // control method #include <espcopter.h> // ESPcopter lib void setup() { mainSetup(); // main settings setTrimRoll(0); setTrimPitch(0); setTrimYaw(0); } void loop() { mainLoop (); // main loop for(int i =0; i < altitudeDrone; i++){// for loop for switching the leds on if(i < 4){ // if altitude of drone is lower than 40cm ESPsetPixel(i,0,255,0); // on green 0-4 } if(i >= 4 && i < 8 ){ // if altitude of drone is between 40cm and 80cm ESPsetPixel(i,0,0,255); // on blue 4-8 } if(i >= 8 && i < 12){ // if altitude of droneis between 80cm and 120cm ESPsetPixel(i,255,0,0); // on red 8-12 } } for(int i =11; altitudeDrone < i; i--){ // for loop for switching the leds off ESPsetPixel(i,0,0,0); } ESPpixelShow(); // commint*/ }Result:
-
ESPcopter and Visuino: Convert Acceleration to Angle From Accelerometer and Gyroscope
08/13/2019 at 18:54 • 0 commentsThe Accelerometer sends X, Y, and Z acceleration forces. Often however we need to convert the forces into X, Y, Z 3D angle to determine the 3D Orientation of the sensor. Quite few people requested such tutorial, and finally I have found time to make it.
-
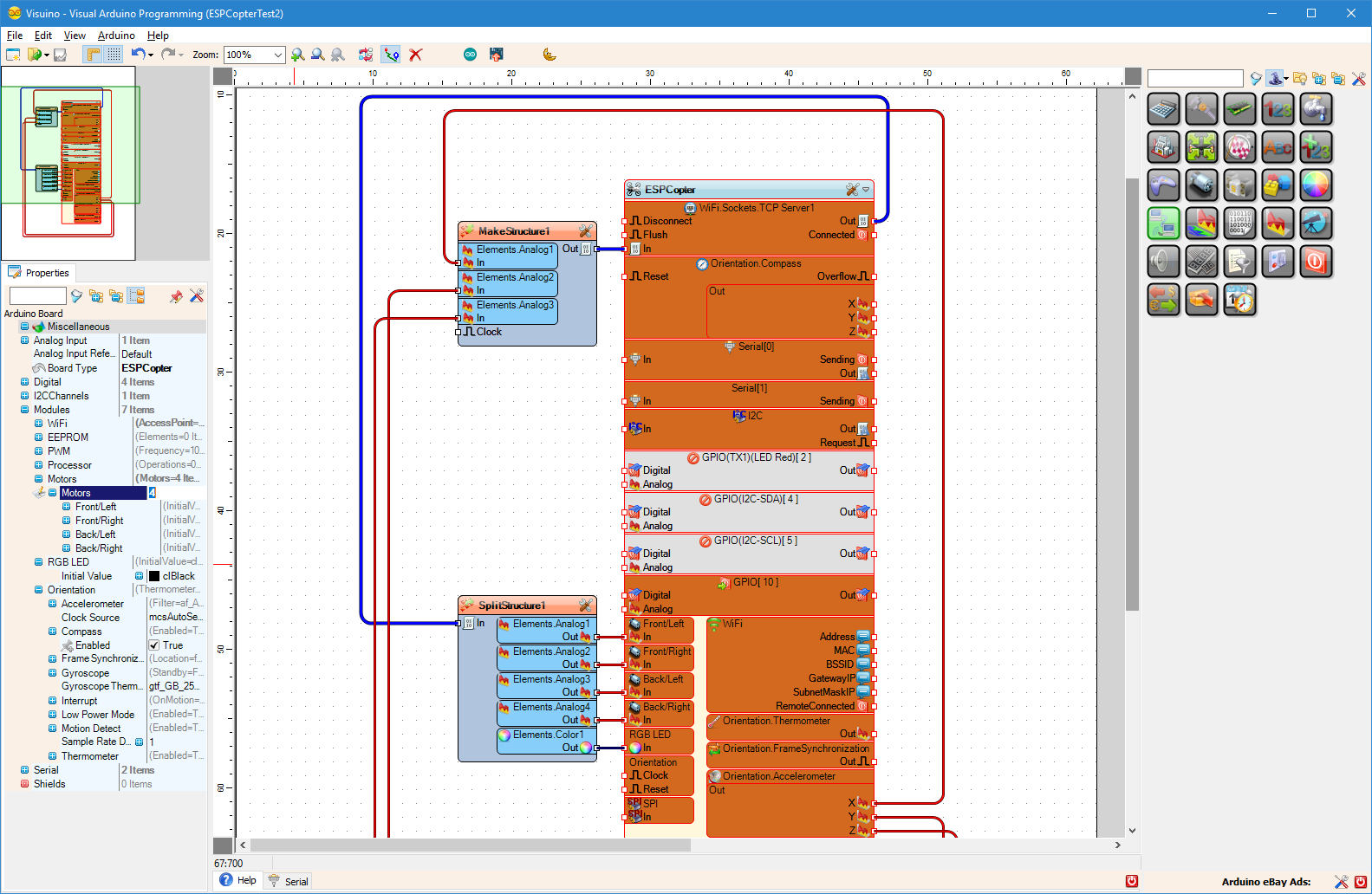
The ESPcopter is now fully mapped as board in Visuino!
06/27/2019 at 02:53 • 0 commentsIn the last few days, I have mapped the ESPcopter in Visuino, and now you can select the ESPcopter as board. All sensors, motors and the LED are immediately available and easy to use:
A Beta version of Visuino with this functionality is available in the MeWe Visuino Group!
-
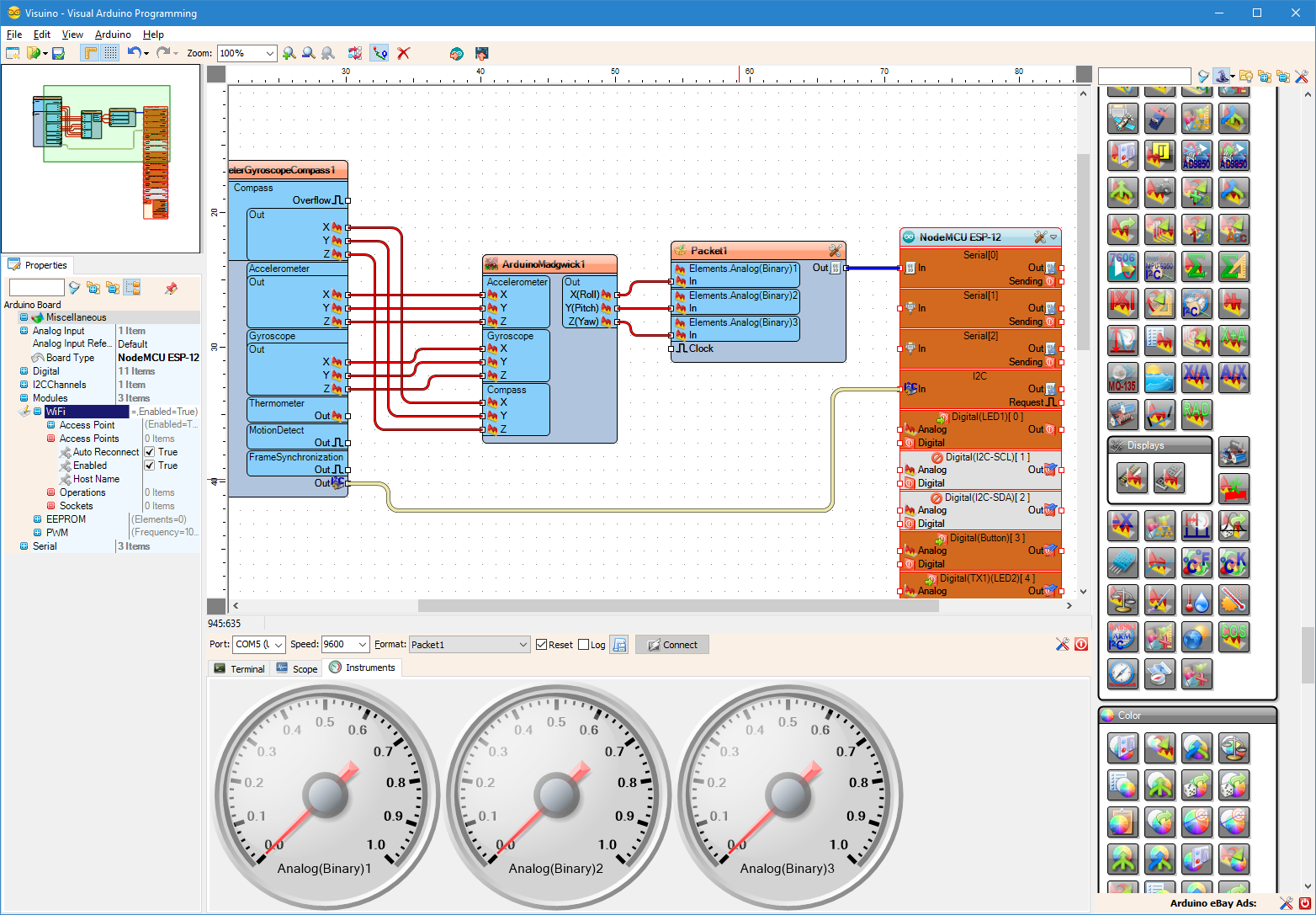
Added Madgwick Filter to Visuino to compute the 3D orientation
07/24/2017 at 03:16 • 0 commentsA "Madgwick Filter" component already has been added to Visuino to compute the 3D orientation of the Drone:
![]()
-
Espcopter Born to Fly
07/09/2017 at 20:19 • 0 commentsSupport the Indiegogo Campaign !!
-
ESPcopter Accelerometer and Gyroscope data
07/09/2017 at 20:17 • 0 commentsAccelerometer and Gyroscope data from a #espcopter IMU is displayed independently as well as combined with a complementary filter.
Support the Indiegogo Campaign !!
https://www.indiegogo.com/projects/espcopter#/
Have any questions? For more information, visit our community site at http://espcopter.com/community/ or ask us in our Facebook group (Link below)!
Facebook Group: https://www.facebook.com/groups/1055252907941836/?fref=ts
-
ESPCopter Laser Range Sensor test
07/05/2017 at 21:19 • 0 commentsTesting the ESPCopter 'sLaser Range sensor:
Programing ESPcopter - ESP8266 Drone with Visuino
Visually Programing ESPcopter - ESP8266 based programmable Drone with Visuino