One of the most important aspects of consideration in the realm of prosthetic design is mental loading. The ability to control the many muscles within our body is a gift - one that people with amputees do not completely have. There are are range of prosthetic arms on the market today, each of which have downfalls whether that might be functionality, ergonomics, usability or what might not necessarily come to mind at first - cost! Often times high quality prosthetic limbs can be quite expensive too.
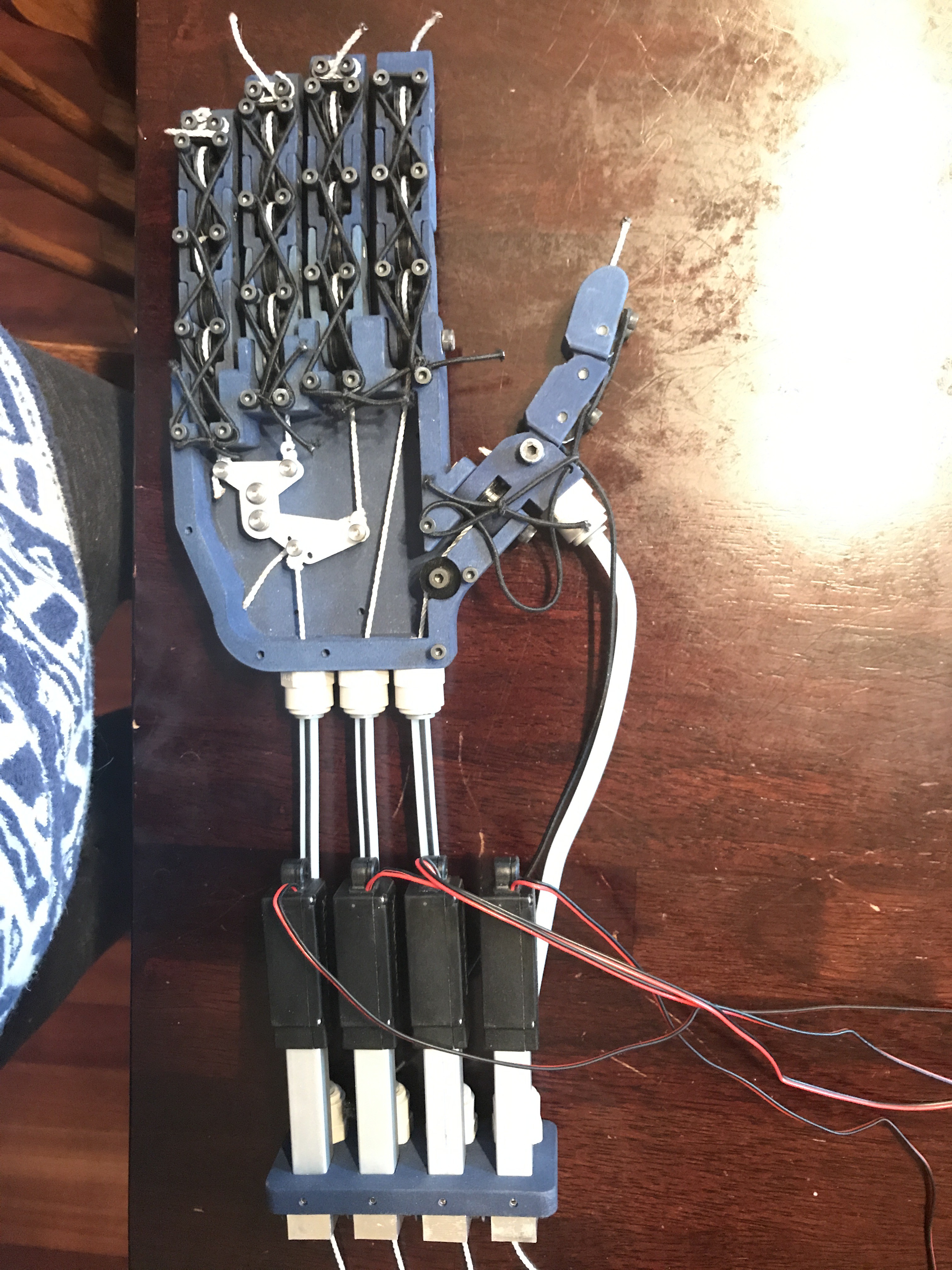
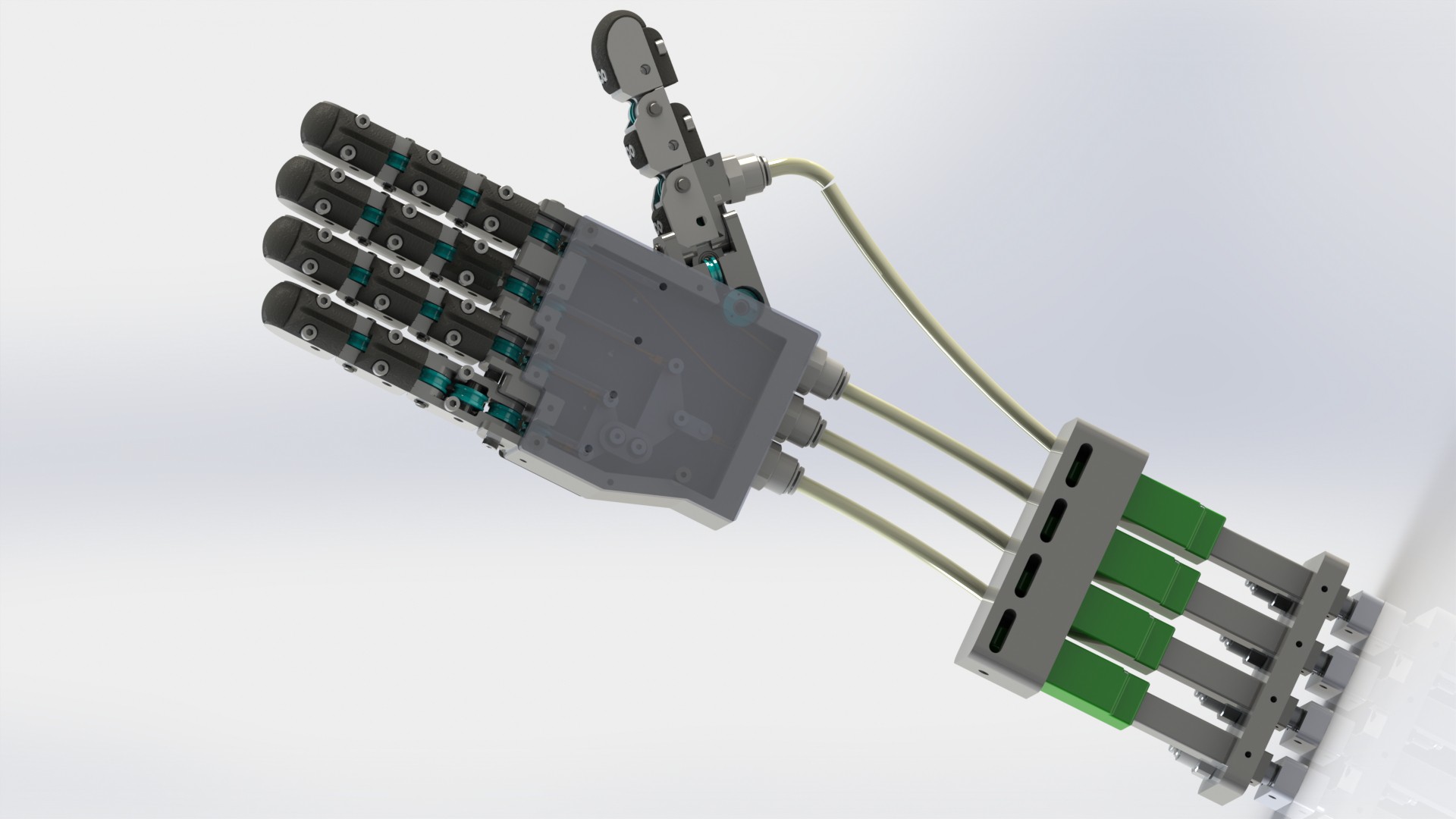
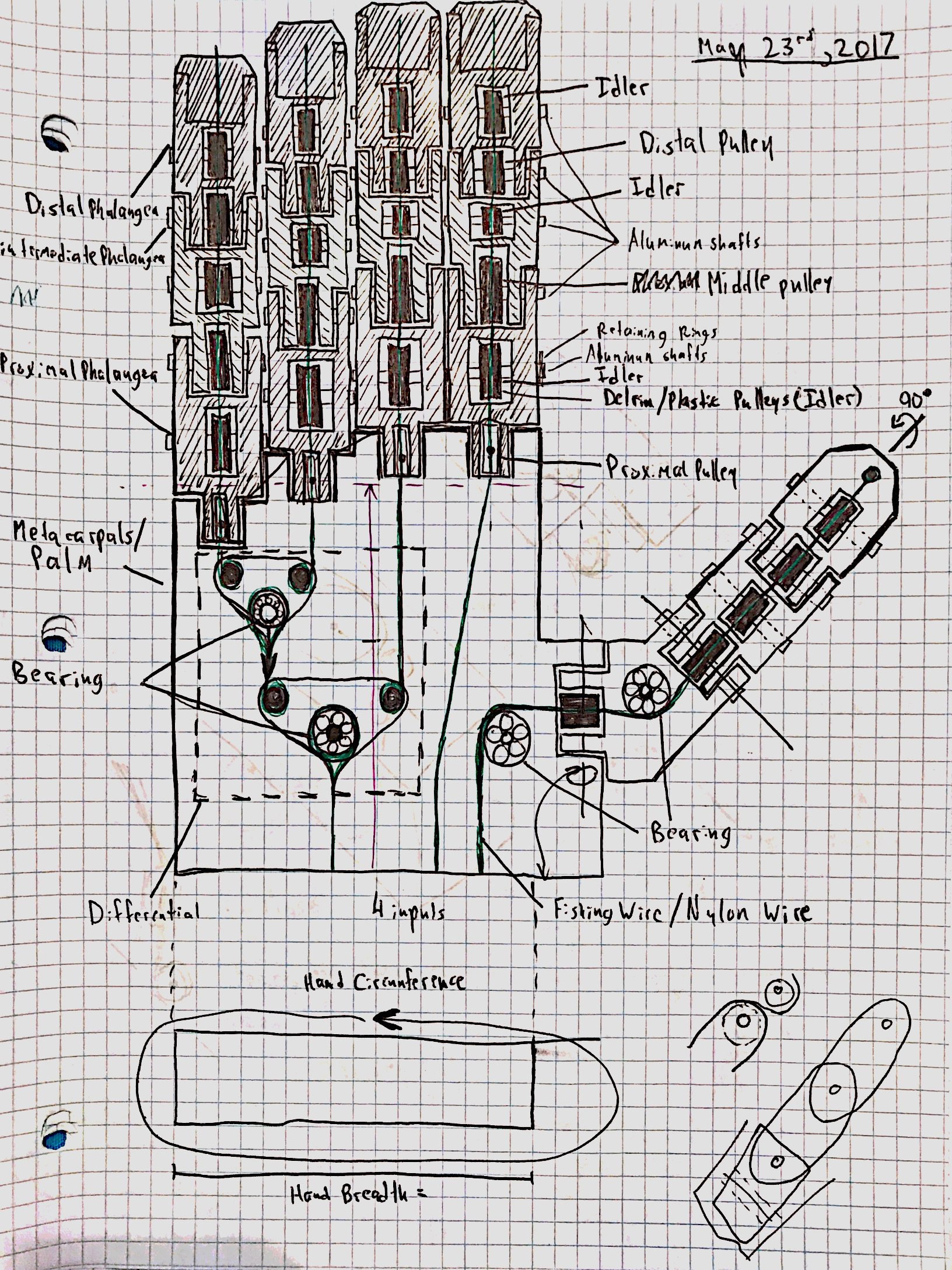
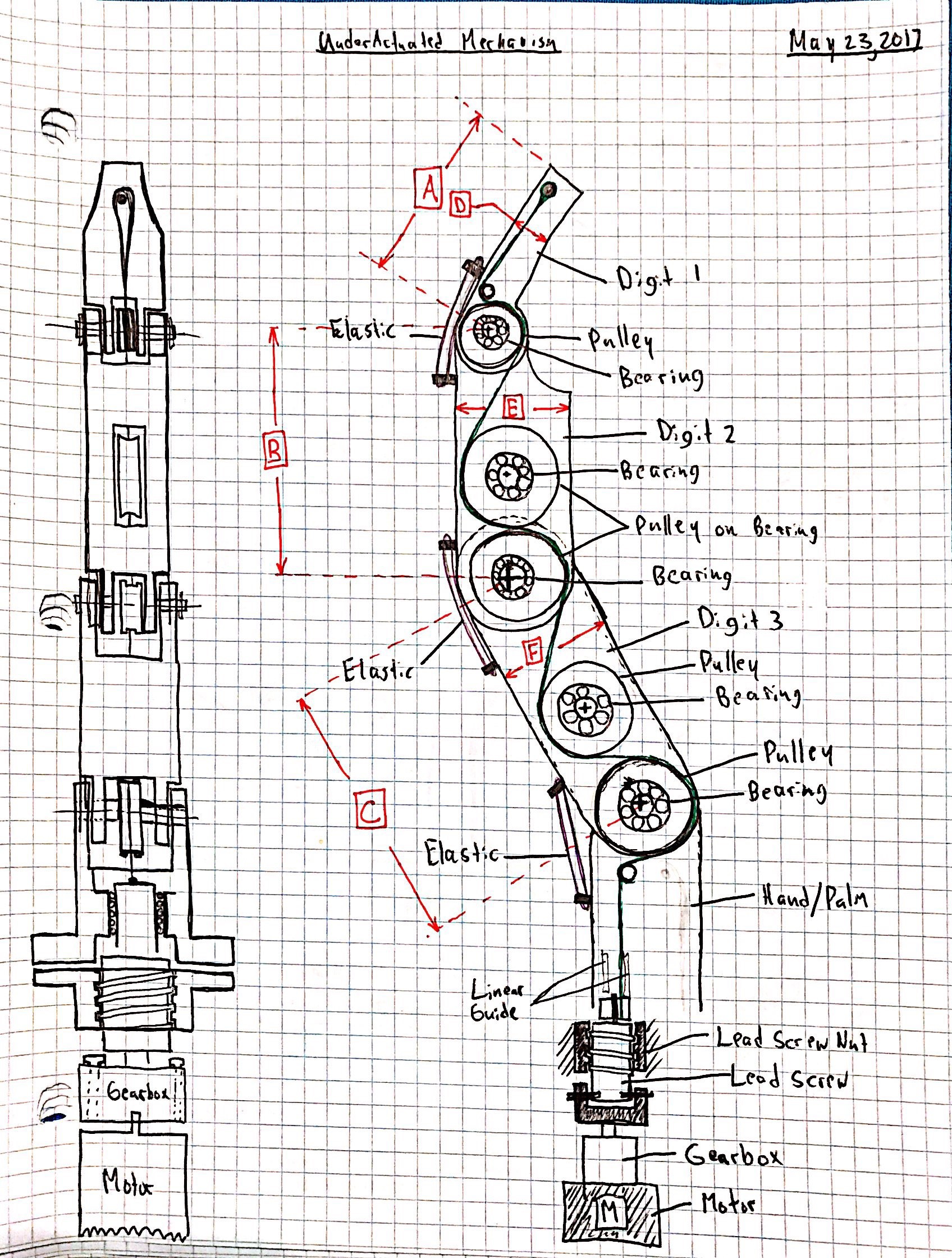
UAProstheticHand, short for “ Under-Actuated Prosthetic Hand, is a prosthetic hand that aims to provide full hand actuation capability at low cost and low mental loading. There are five digits in the human hand each of which are extremely important in creating a hand that is extremely dexterous and capable of maneuvering a range of different objects. It is important to note that most of the functionality of the human hand comes through cooperative use of each of the five digits. The index finger and the thumb are arguably the most important fingers in the human hand as they are necessary for most methods of precision gripping in addition to nearly all other five digit methods of grasping. The middle finger, ring finger, and pinky serve a less crucial purpose for the majority of day to day task and tend to move in in sync largely conforming around objects that are grasped. In order to reduce the mental loading associated with these muscles UAProstheticHand implements a double differential to control these three fingers. This reduces the degrees of freedom(DOF from 3 to 1 thereby simplifying the control of UAProstheticHand, reducing the weight, and the cost. The double differential allows the three fingers to be actuated together and allows the three fingers to conform around any objects it grasps using an active close passive (elastic) open mechanism.
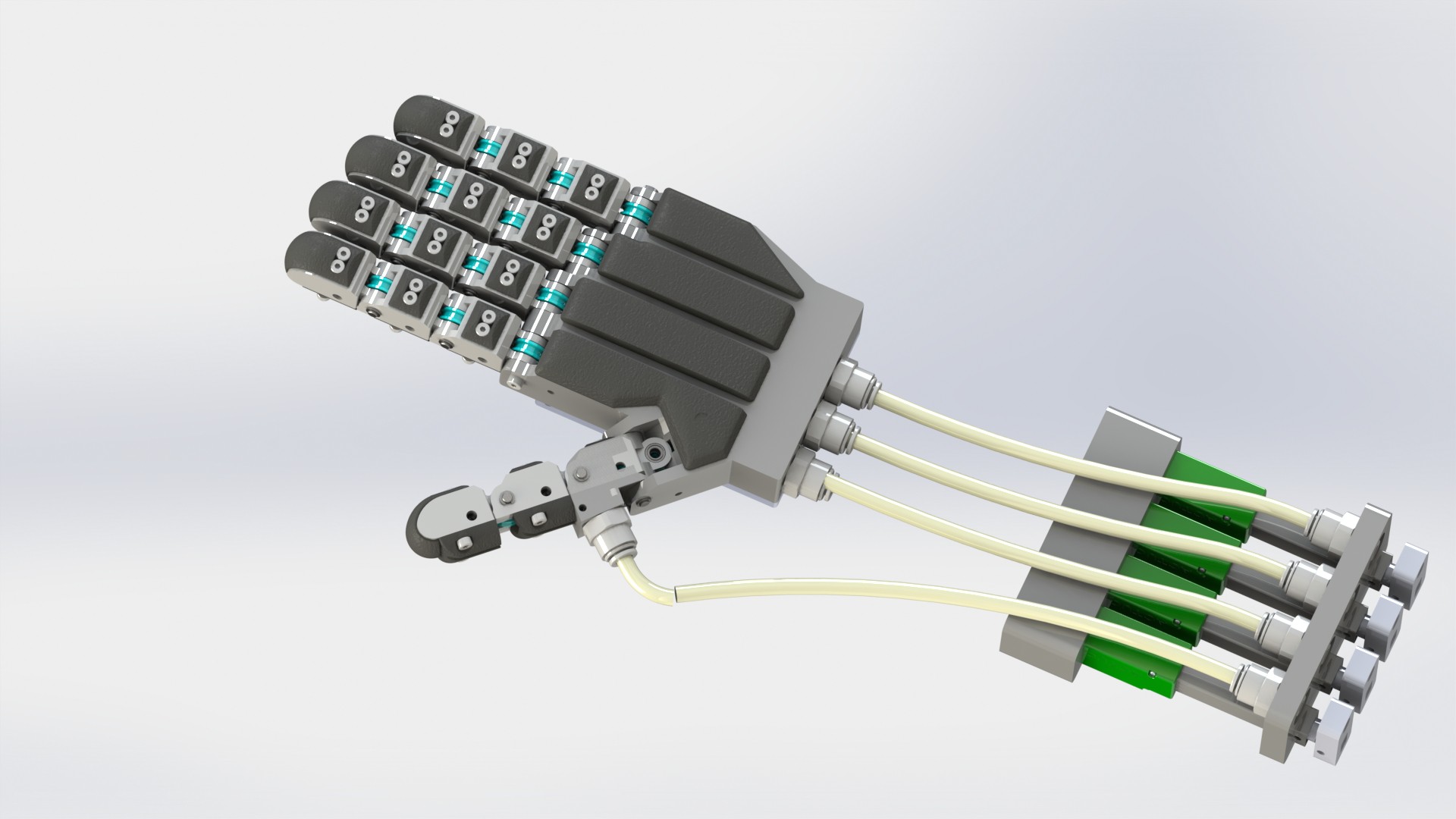
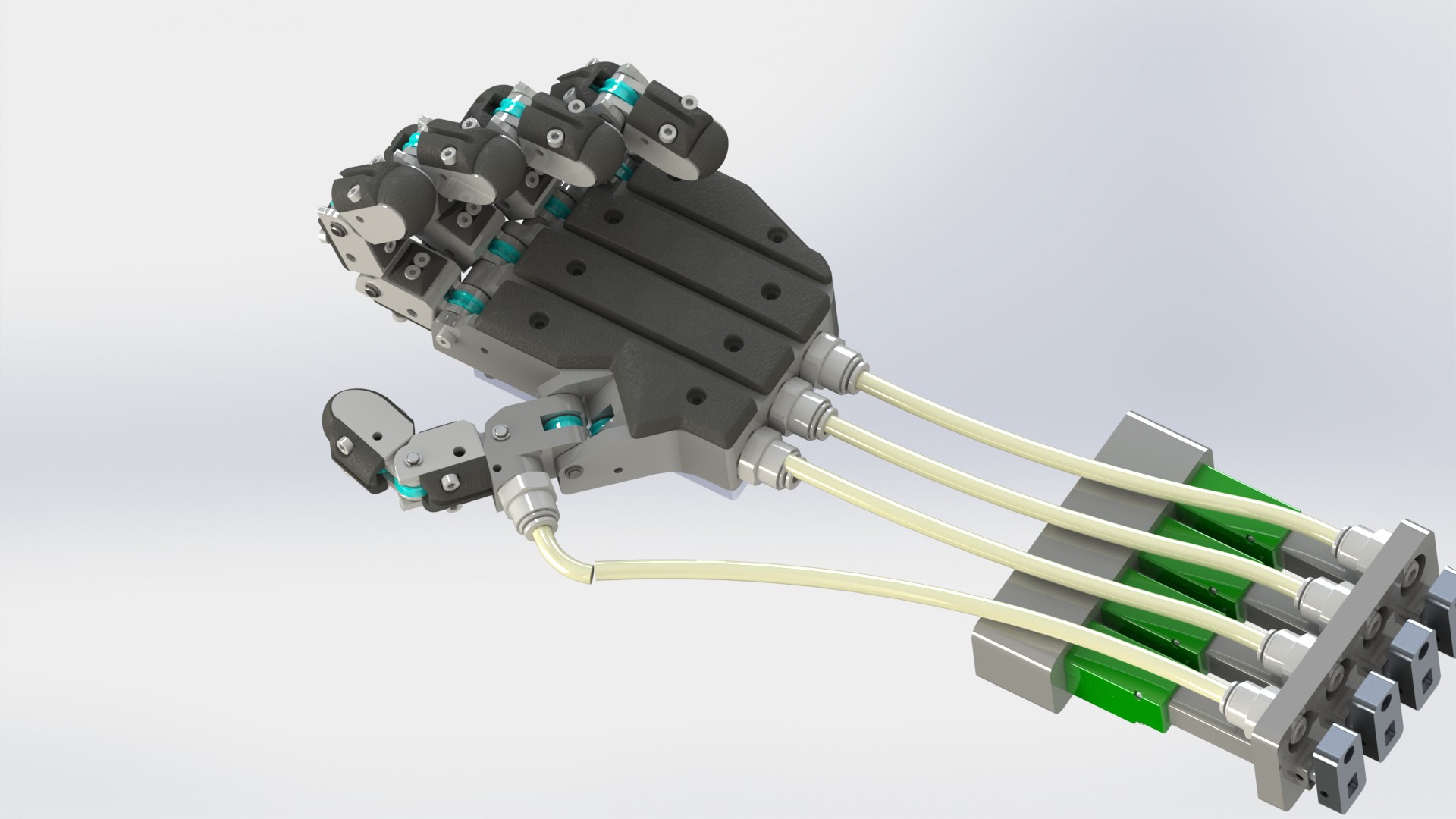
The thumb is the most complex digit on the human hand as it can move in many directions. For this reason the thumb on UAProstheticHand is designed with 2 DOF, where one degree allows for Abduction/Adduction (rotation of the thumb joint) and Flexion/Extension of the thumb joint. A 2 DOF thumb encompasses the movement required for nearly all methods of grasping giving UAProstheticHand the ability to hold nearly any object that it is presented with.
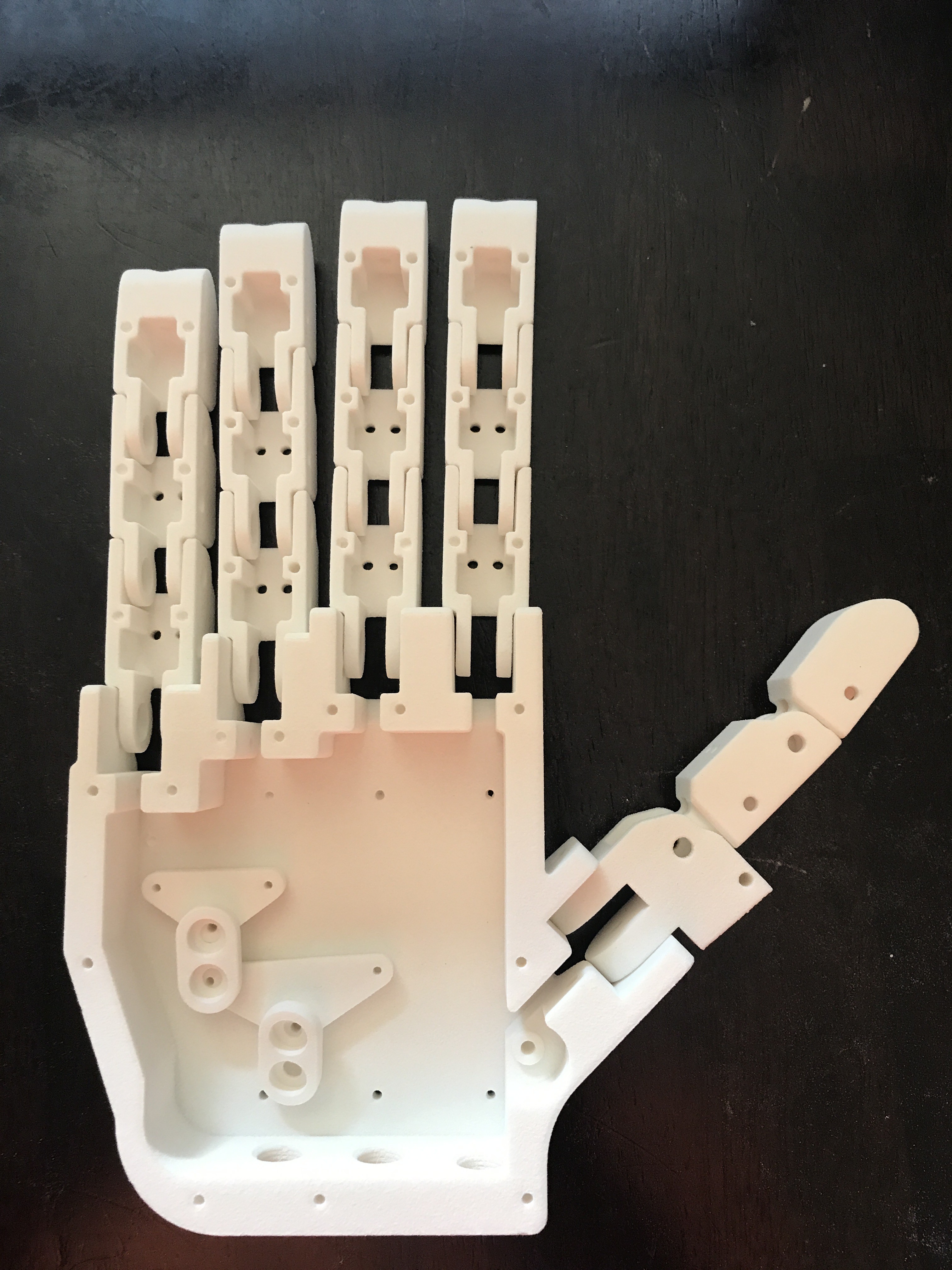
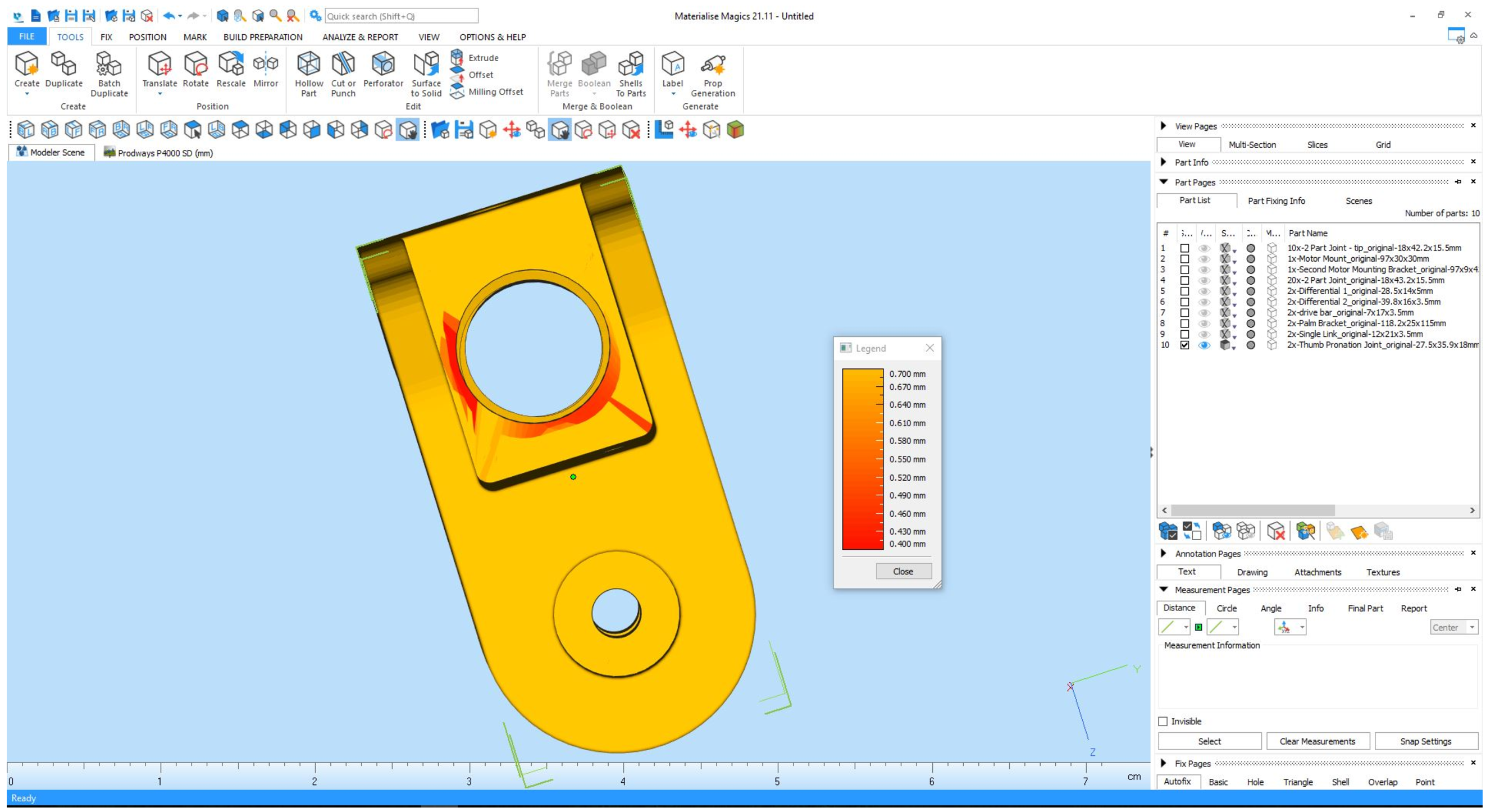
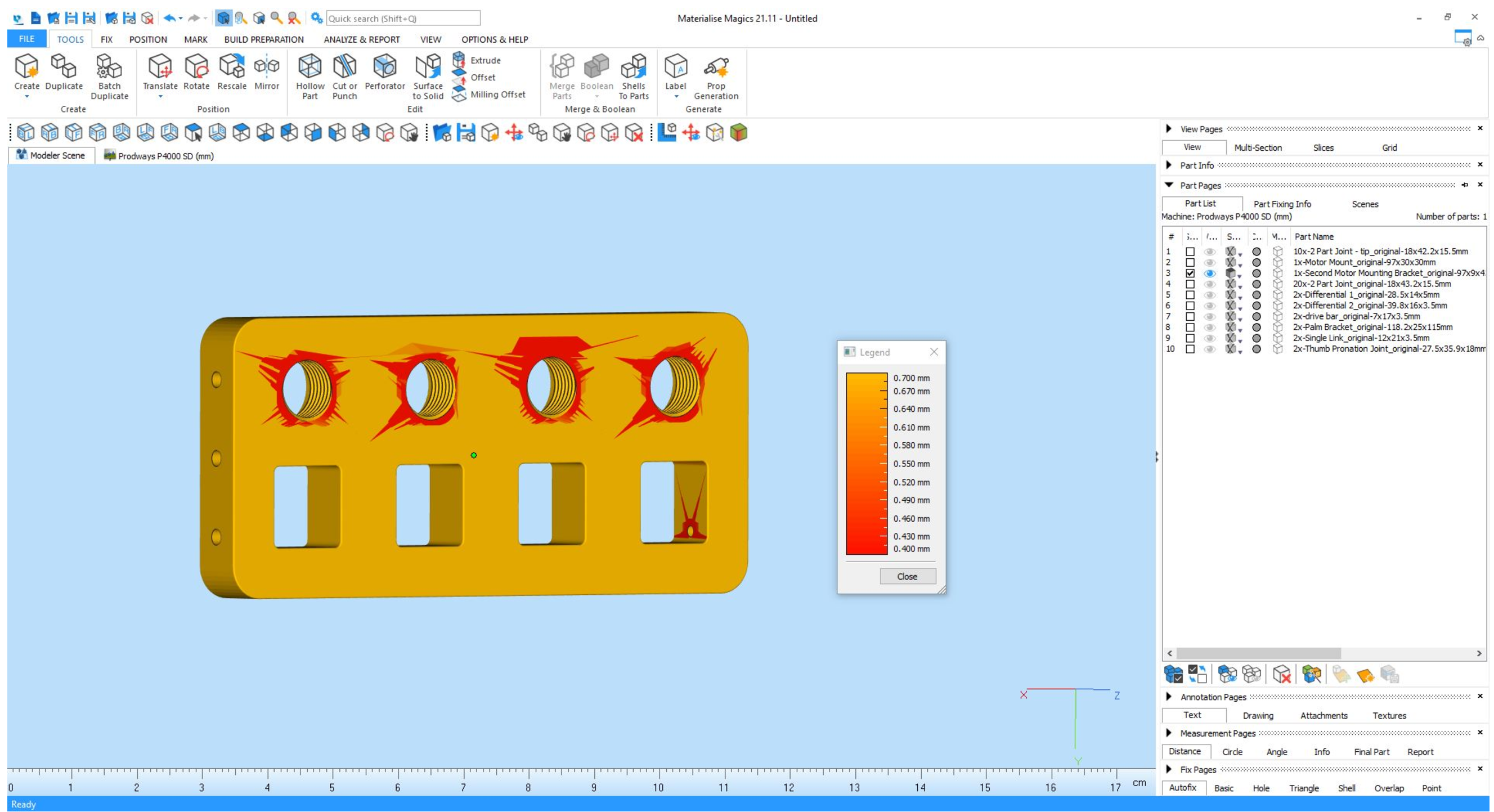
UAProstheticHand will also have a much lower cost than other high functionality prosthesis on the market due to the fact that most parts can be 3d printed, and the fact that there are a total of only 4 motors
Four primary goals were established at the beginning of UAProstheticHand’s conception, which have heavily influenced its design. First of all the prosthesis should serve the user; the user should not be the servant of the prosthesis. This is extremely important in the design of a good prosthetic as the user should always feel completely in control of the prosthetic otherwise the user will likely not feel comfortable using it. Second of all the prosthesis must be user friendly or simple to learn to use. Any device should be intuitive and natural. Third of all the prosthesis should not sacrifice any human functional ability. The prosthesis should be used to supplement, not subtract, from available function. This is necessary for the prosthesis to be deemed truly useful. Last of all the prosthesis must look natural. Movements that appear mechanical in nature attract unwanted attention in social situations and may not be pleasing to the eye.
Thank you for taking the time to check this project out we look forward to showing our progress and making this game changing device!
- Taran Ravindran












Hey Shrad, not sure if I'm understanding your idea correctly. Are you suggesting a method to allow individual actuation of each digit of a finger? That is a very intriguing idea, but it was actually by design that each finger is only actuated as a whole, as opposed to individual digit actuation. Fewer degrees of freedom means fewer motors are necessary, and also allows the fingers to conform around objects naturally! I really like the idea though, and I'll definitely look into something like this for a future iteration! :)