The designs for the 3D printed components and all the software for both processors on the robot can be found here.
A video of the robots training for their appearance in my Lecture in Rhyme all about them. They are being controlled using MQTT from an Azure IOT Hub.
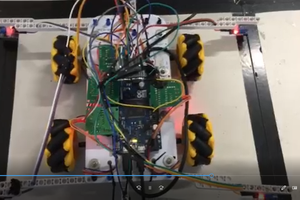
A video of the robots showing autonomous behaviour. Each robot is running a program that was downloaded over MQTT from Azure into an ESP 8266. The program is interpreted by code running in the Arduino motor controller, and stored in EEPROM in the device. Programs can be updated at any time, even when another program is running.

 Miguel Wisintainer
Miguel Wisintainer
 Ahmed Azouz
Ahmed Azouz

 shamylmansoor
shamylmansoor
Looks great! It would be interesting to read about how you built it.