Sergei V. Bogdanov
Sergei V. Bogdanov-
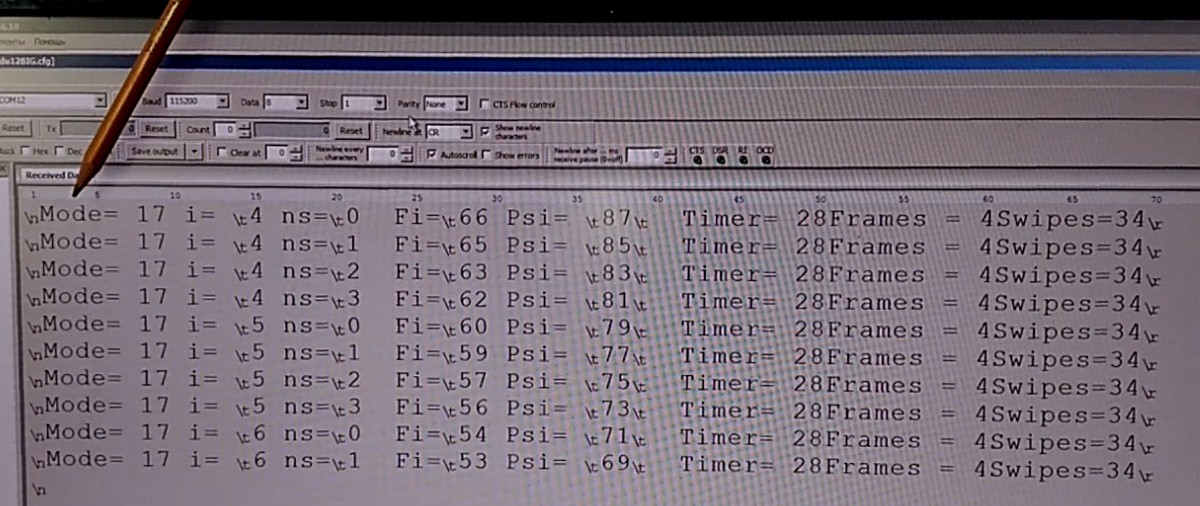
Computer monitor output is coded
09/02/2017 at 22:09 • 0 commentsWe make the next data serial output
Mode - number of Mode (0 - 17)- i - number of point in finger node path
- ns - quantity of internal iteration point
- Fi - angle of the first servo
- Psi- angle of the second servo
- Timer - time in ms between iteration points
- Frames - quantity of internal iteration point
- Swipes - quantity of full swipes of finger node
![]()
-
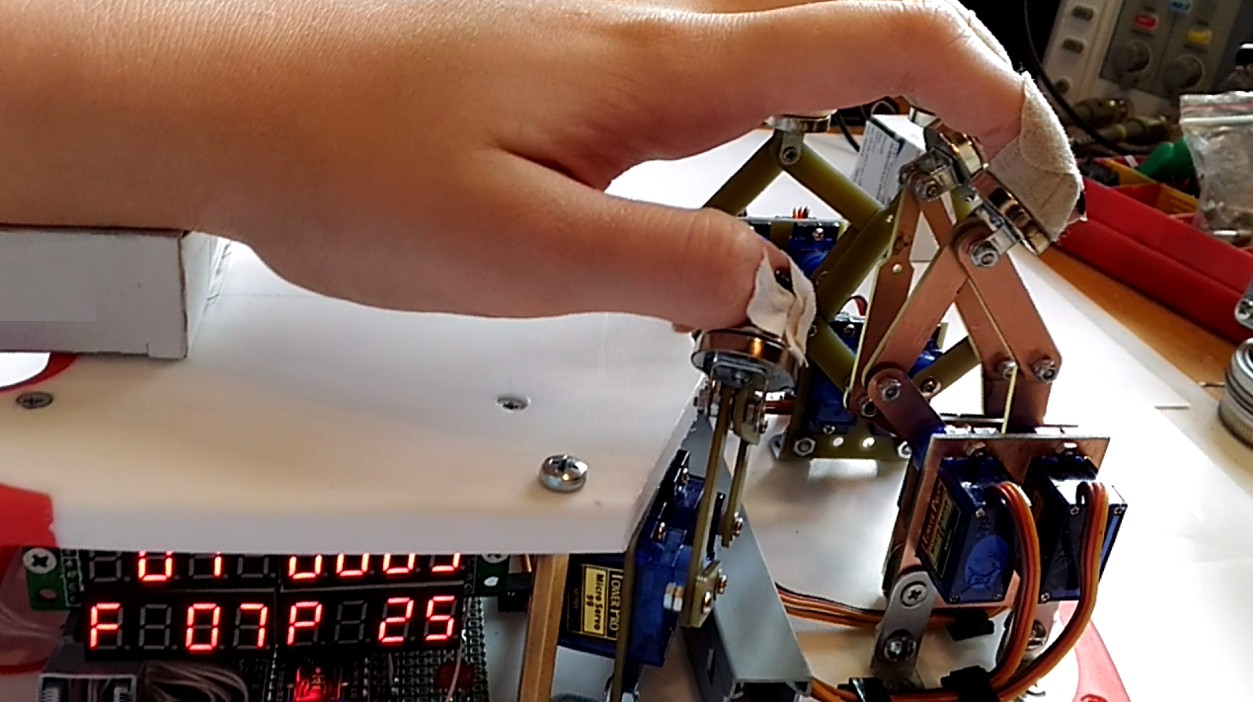
Rehab Helper is assembled and hand plate installed
09/02/2017 at 21:58 • 0 commentsWe use one more breadboard to make hand plate, so You can lay hand for massage.
![]()
And the final test is over- all work fine.![]()
-
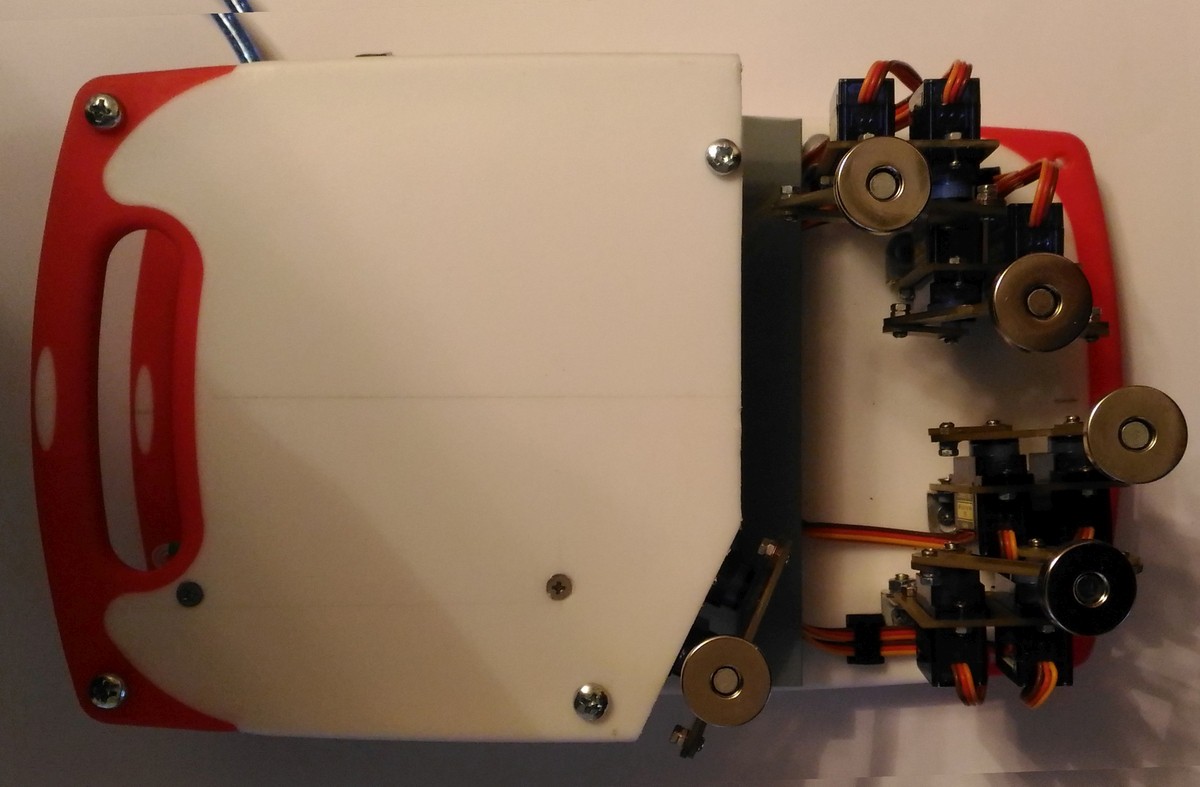
Breadboard for servos is designed.
08/31/2017 at 12:03 • 0 commentsWe assemble the base for the Rehab Helper
Blocks of servos (pairs) are mounted on the board. The move!![]()
And cables are mounted and soldered
![]()
-
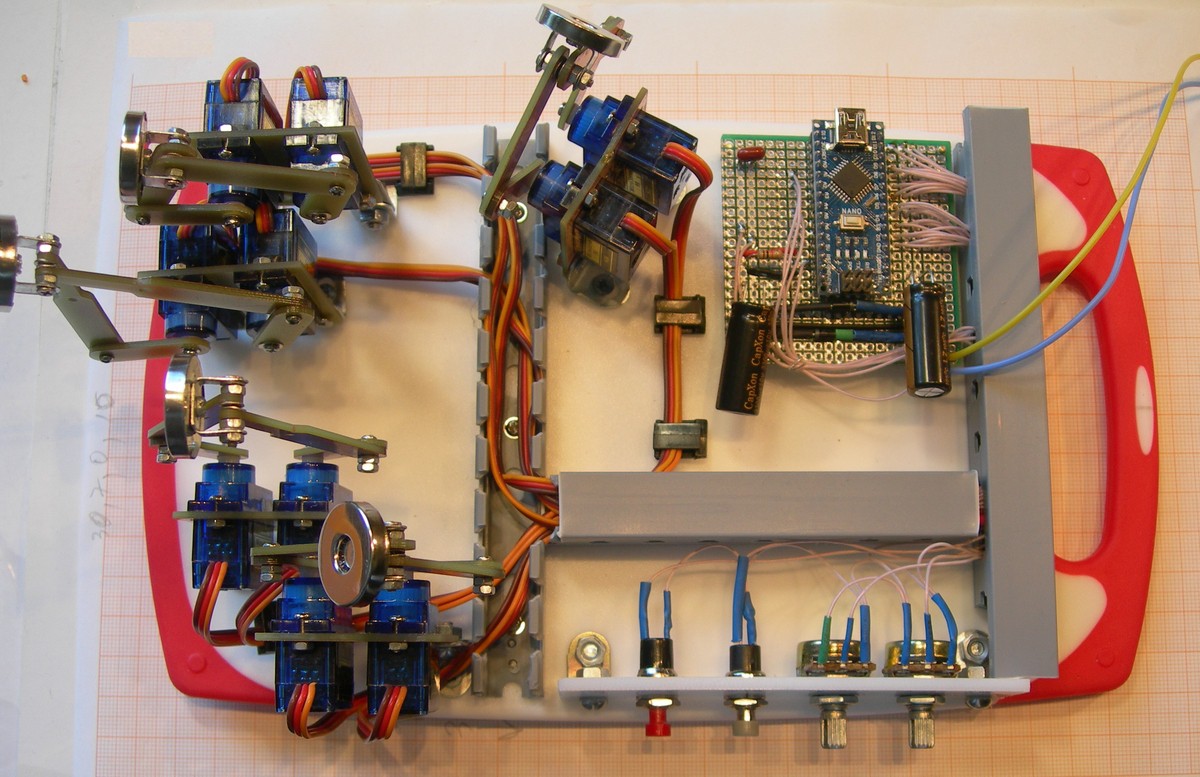
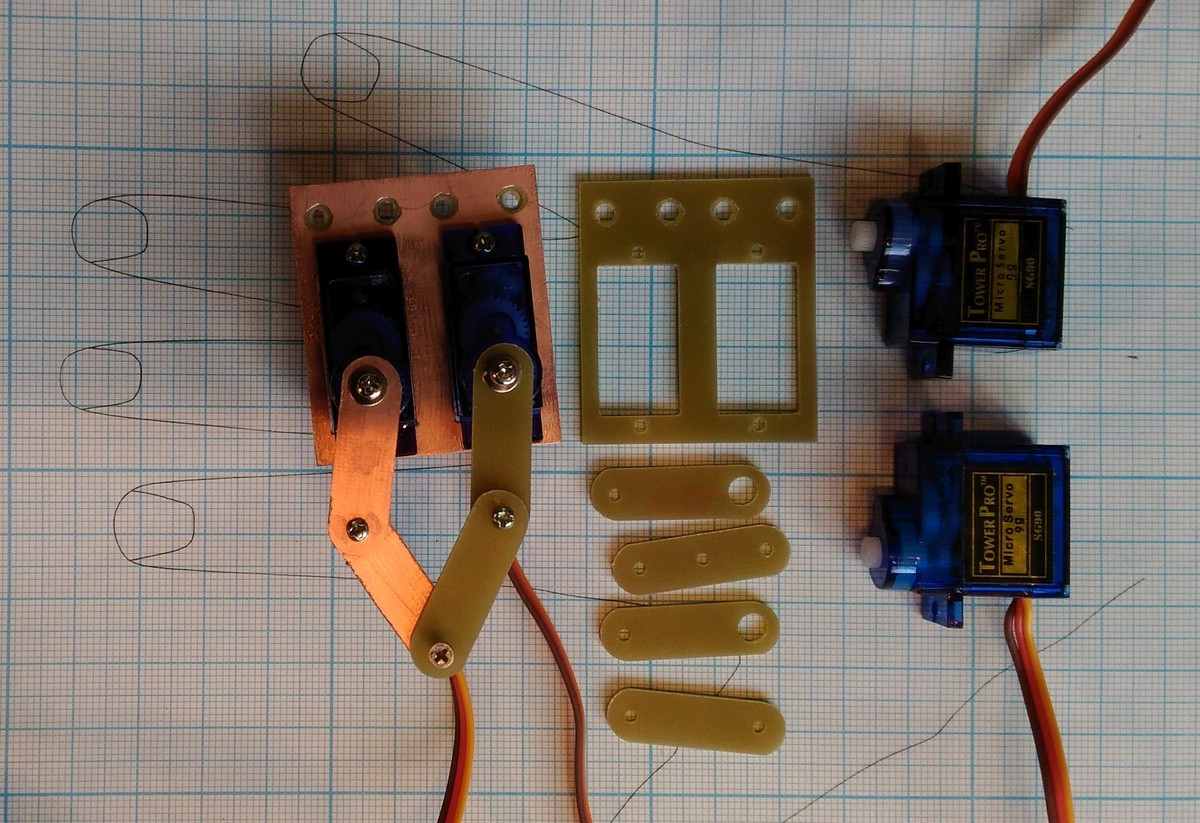
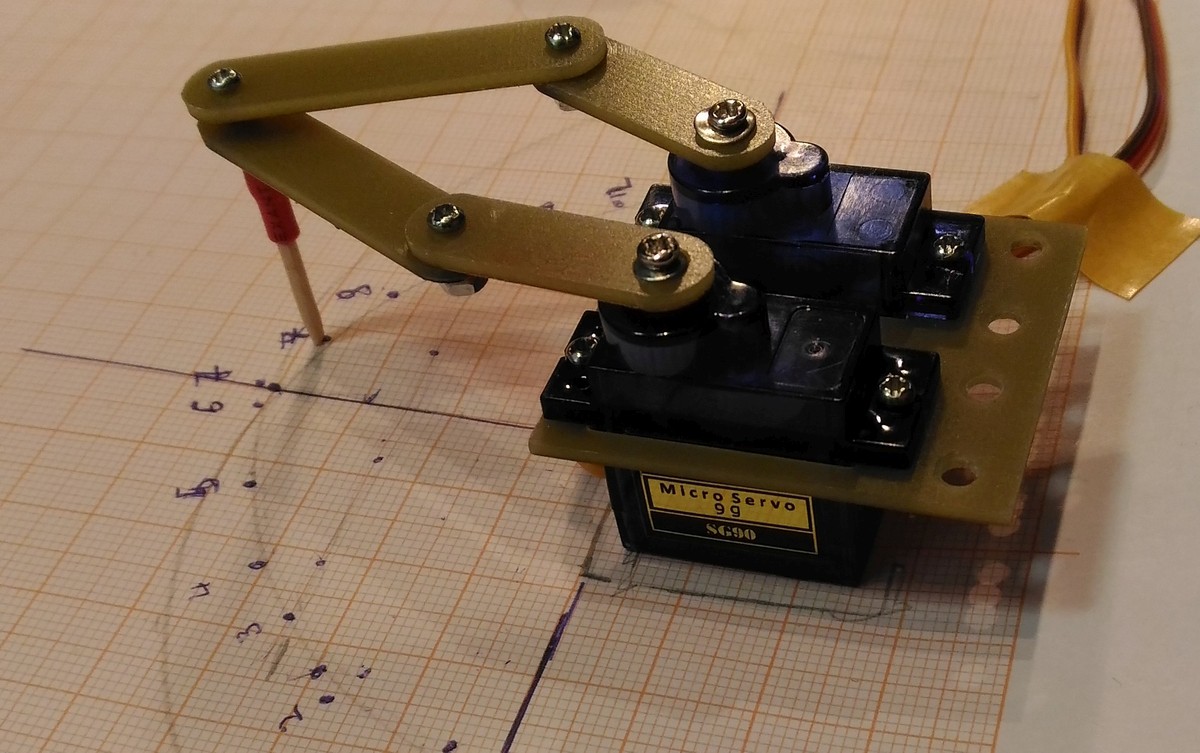
5-bar linkage model is designed and tested
08/31/2017 at 11:26 • 0 commentsThe driving gear for a massage of fingers was constructed and tested. We choose 5-bar linkage with 2 servos. Here is the assembled construction and components. The lever arms and bases are made from FR4 Blank Clad Circuit Board using micromiller, or it can be 3D-printed.
![]()
We made model linkage to calculate the angle values. We use simple test program to controle servos by potentiometers to find the angles for movement.![]()
-
Project is open.
08/25/2017 at 00:40 • 0 commentsShort description is opened.
Post Stroke Spasticity Rehab Helper
The spasticity is the most common post stroke effect. We construct simple open sourse Arduino -based Post Stroke Spasticity Rehab Helper.