JanThar
JanThar-
Customizable motorcasing
09/05/2017 at 15:40 • 0 commentsIn order to use different sizes of rumble motors a new casing type was added. This one is now fully customizeable, it fits almost for every motor. Other customizeable parameters beside the dimensions of the motors are for example the depth of the walls or an offset so thicker fabtic can be used. All options that can be changed are commented in the scad-file, in order to explain what they will change.
The scad-file also contains a test-method to check if everthing was scaled correctly, because in the case that the motor ist very large the clippers might be to thin to keep it in place.
-
Bee swarms and power consumption
09/03/2017 at 20:38 • 0 commentsOne importand part to consider is that vibration motors make noise, something which isn't intended and should be reduced as far as possible. it will otherwise undermine the invisible tool effect of the vest, might cause confusion on nearby people and will disturb the audio channel of the wearer, who might want to use it also for orientation (bat echolot). With the first version, we had a big issue with sound, we even made a sign on one exhibition with a warnign "bees inside", since whenever sombody passes the vest on short distance, most of the motors went on full power and gave a corresponding sound.
With the next version we had less coupling effects between the motors, and for using a normal power pack with limited current instead of a racing battery pack we also had to reduce power consumption. Therefore we decided to drive - apart from the normal PWM driving of each motor - only few motors at the same time on each driver circuit, drastically reducing both power consumption and noise.
At the moment each half of the vest (64 vibration motors and their driver circuits) is powered with one 1A USB port of the power pack, Realsense and Up-board on another 2.4 A port - with a 18200 mAh power bank we could run the system for almost 8h on exhibitions, with a neglectable noise level.
-
Curse of the depth camera
09/03/2017 at 20:23 • 0 commentsThe whole systems works well on exhibitions: High tables and standing persons result that the camera opening angle is not as bad as in real life. Our basic example for a real life problem with this angle is always something in head area: with the belly-mounted camera the system will warn you if it is far away that you will have to duck through vibrations in the upper part of the motor array, but when the object is directly in front of the person the camera will look below it and won't warn the wearer anymore. An more obvious problem is glass: While the user trust the system quite fast good enough to walk around with closed eyes, at some point dependent on the location they where straigth moving into glass fronts or mirrors, if we wouldn't stop them. Another problem not shown on exhibitions is that the infrared based camera system won't work in sunlight, reducing the usability drastic.
Our intended solution is in the next step adding additional ultrasonic and lidar system for the near range, if we can build a system with fast enough response time on ultrasonic basis as a sort of rough 3D scanner, we might try to replace the camera system as most expensive part of the system complete, or at least reduce it to an optional add on.
-
Motor driver evolution
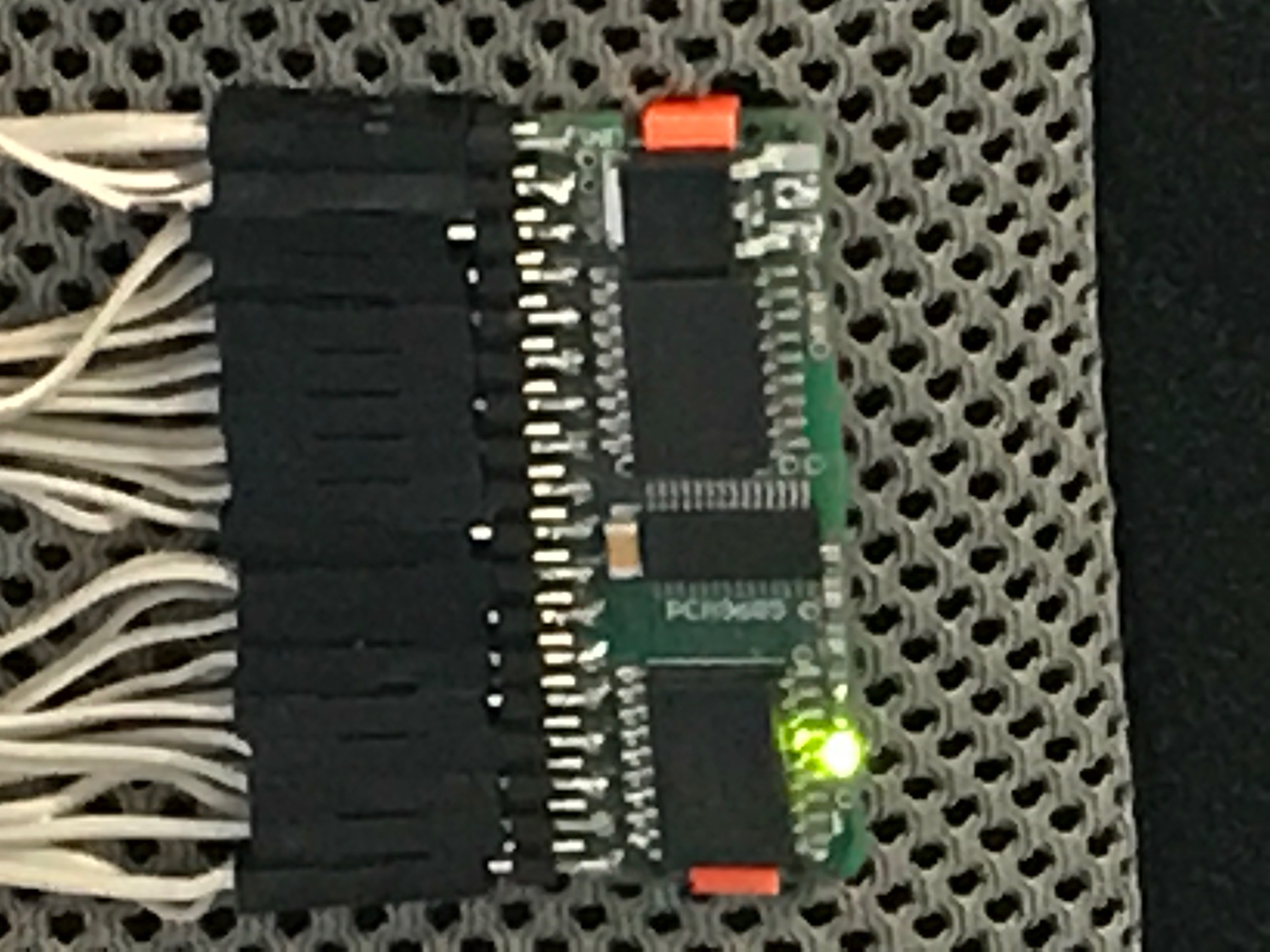
09/03/2017 at 20:08 • 0 commentsGoal was a small driver board which only need power supply and I2C and then drives 16 motors at once. In several iterations we found out that the best way was to have all I/O pins on one side, both for size and later wiring. Furthermore, having two pins (one on each side of the board) drastically reduces complexity of wiring and faults compared to the first intended common ground wire, where all motors share one wire.
A variable voltage converter can supply the board with the 3.3V necessary for the here used vibration motors, and can be supplied e.g. a normal 5V power bank. Since the regulator is directly on board of the driver board, the system is scalable to even bigger (or smaller) vibration motor arrays. Board layout and 3D-design files can be found here.
![]()
-
Vibration motor choice
09/03/2017 at 19:54 • 0 commentsFor a first iteration of the vest (or now belt) we found some nice encapsulated vibration motors - but they are no longer available. Pancake motors, which we wanted to use first, where not that reliable on the long run, and hard to solder. Our vibration motor of choise is now a standard, as small as possible vibration motor with external excenter (because they are easy to get :). To prevent the excenter to stuck in the pla of the housing, we make our own small encapsulation with a piece drinking straw (the excenter should be therefore have a smaller diameter as the motor housing, which should be a little bit smaller than the (5mm) straw diameter). The second importand choise are the electrical connectors of the motor: Wires are annoying, because they have to insulated. We chose instead motors with a spring connector at the end, which allows reliable soldering (with just small pads on the motor it might be prone to breaking) and will be encapsulated within the housing, preventing the need of additional isolation.
![]()