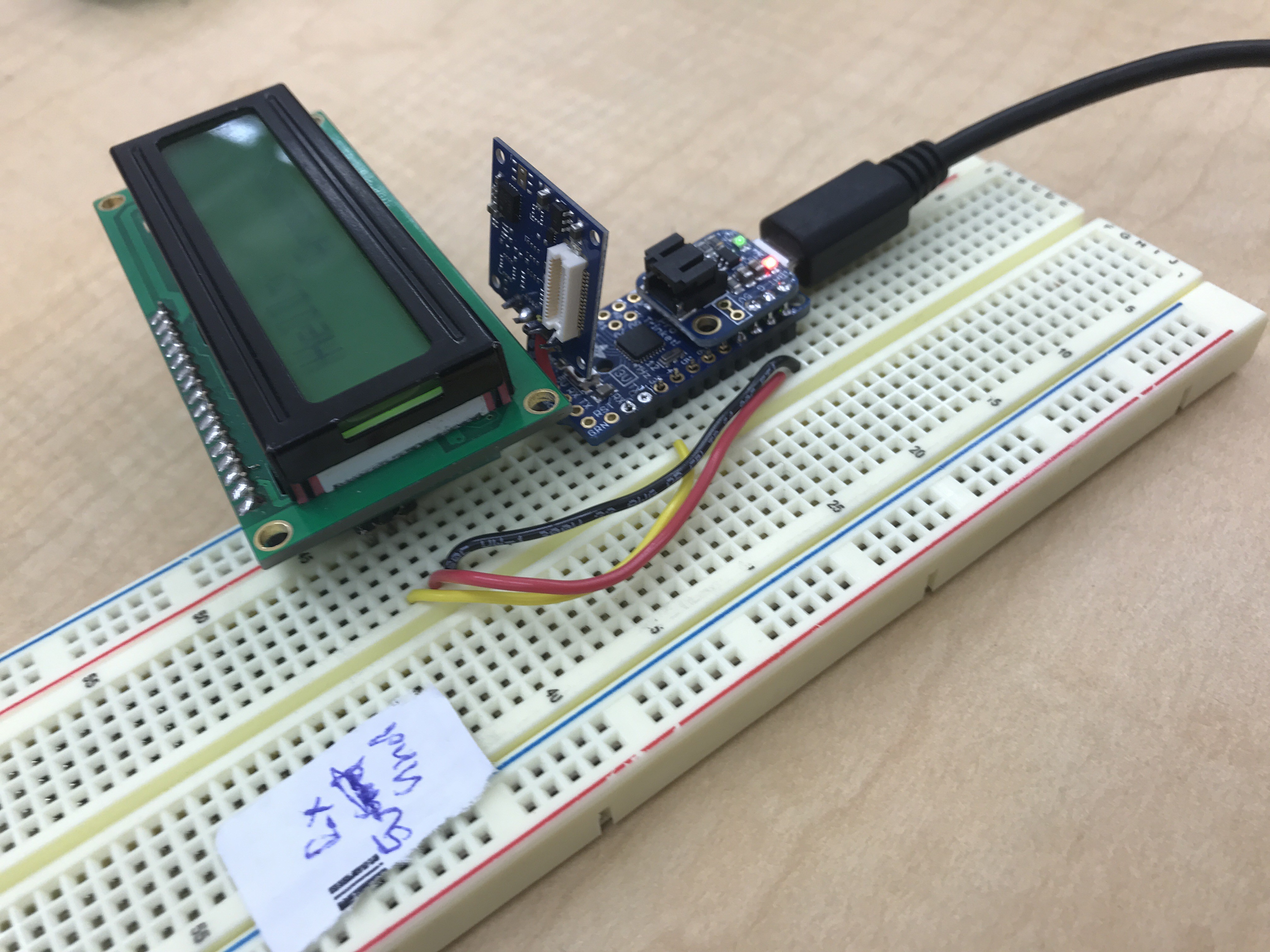
The purpose of this project was to transform Bionic Bird’s flight controls from driver-controlled to autonomous. Although not all goals were achieved, there were significant findings related to data gathering and electrical configurations. It was found that acceleration data is the most promising in terms of controlling basic wing and tail movement of a robotic bird. A basic algorithm has been designed to utilize two out of the three IMU axes for wing and tail control.
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Maximiliano Palay
Maximiliano Palay
 Hunter Santana
Hunter Santana
 Aractapod
Aractapod