PacificBots
PacificBots-
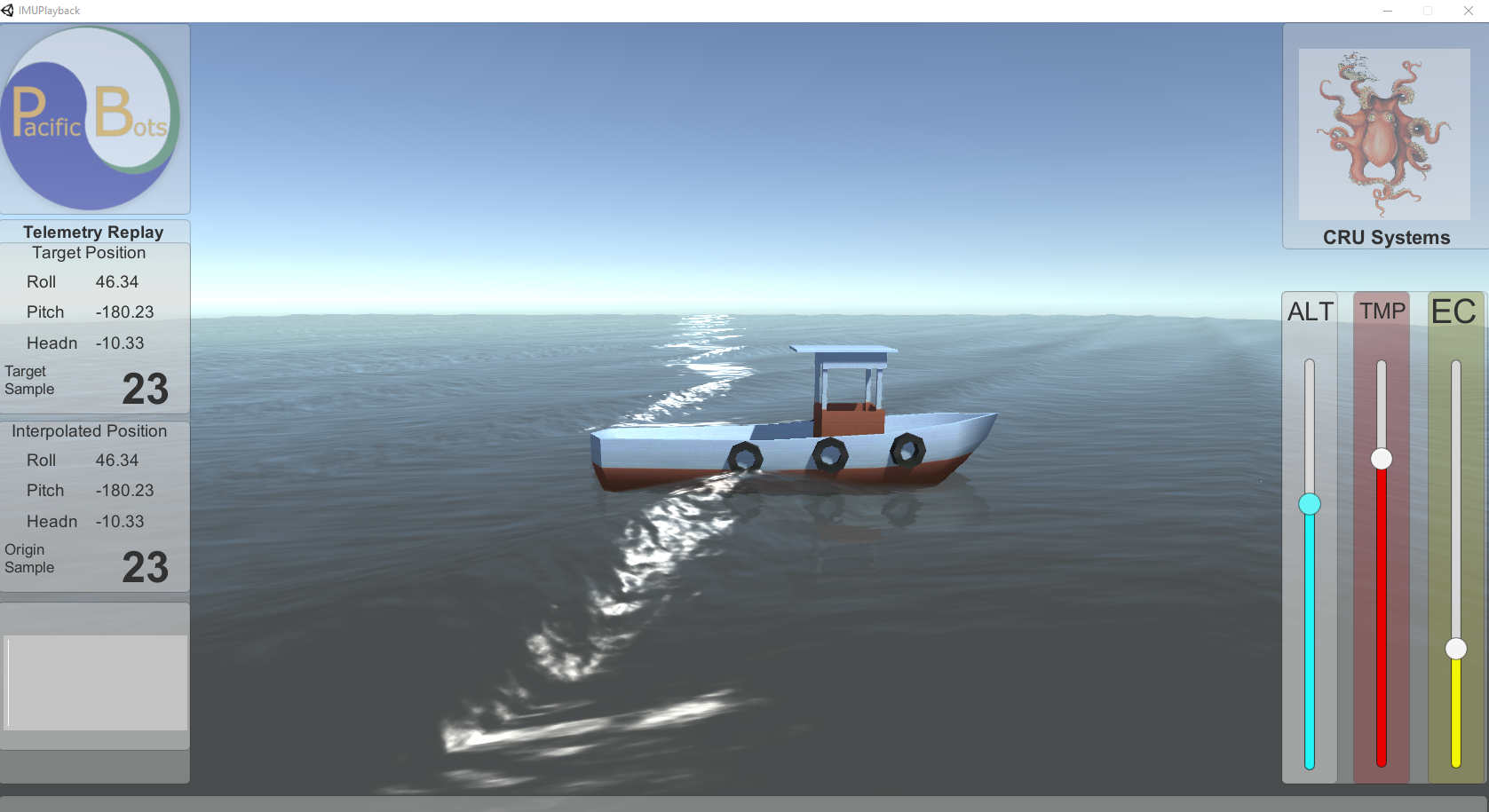
Telemetry Replay
10/05/2017 at 07:52 • 0 commentsOne of the cooler aspects of monitoring the ocean is having a situational awareness of just what the water conditions are like. Is it choppy, or smooth as glass?
To be able to ascertain this information, a 10-DOF IMU was installed on the testing platform and Telemetry Replay was born! The buoy collects 25 seconds of data from the IMU as it moves about on the ocean's surface. That information is transmitted back and plugged into the ALPHA version of "Telemetry Replay". This Interpolates data from 10-DOF and GPS coordinates to give 25 seconds of real-time orientation and position at sea. BETA will include GPS altitude baked into data so that a reasonable approximation of wave high can also be "replayed."
-
Sailbuoy 2016
10/05/2017 at 07:18 • 0 commentsFOr the sailbuoy, I did not want to build things from scratch. There are a lot of tough little boats out there that can stand up to the Pacific! The one I chose is small, 42" length with a small cockpit that will carry all the electronics/battery and house the rudder servo.
![]()
Waypoints will be entered in before the mission starts. Keeping an eye on the wind patterns, I can adjust course of "Aidan" via satellite to sail correctly in the wind The sail will be limited to 30 degrees of travel in either direction. Getting sails made, even for RC boats are expensive. So, I got a sewing machine, 9oz Dacron sail cloth and sewed my own. Below is the first test sail. It is similar to a storm sail for this size of boat. Hopefully sail 2.0 will be much more robust, lol.
![]()
You can see the relative position of the electronics. The servo is attached to the underside of the cockpit cowl. I am leaning toward fully potting (submerse all electronics in potting compound) so that addresses water issues. Waterproof cases I have found have too much bulk and weight for the working space they provide. The servo is a waterproof servo.
The power system is solar powered. I have managed to fit three panels that will give an output of 18 watts at 5v. This array will be able to supply up to 3 Amps at 5v in full sunlight. The battery is 28AH which will allow the electronics 35 hours of working time before the battery shuts down in the absence of sun. If the battery were to hibernate, it would come back online and restart the kit once it starts to recharge and hits a certain value.
Aidan will be sending telemetry on the voyage. This will include position, battery power, water temp, air temp and probably AIS information.
The Keel is 90 degrees to the hull. Ideally I want a swept back keel so seaweed, mermaids and Krakens will slide off. I am looking at adapting another keel for this, or I might sail it as is.
I am also working on addressing some issues with the rudder assembly for this trip. First up, waterproof servo. Next, replace the plastic bushing with bronze. The tiller is plastic as well and I am looking into to having one CNC'd in titanium. The rudder is plastic as well, but it is sturdy enough. One issue that concerns me is that the servo rods are exposed above deck. Everything I thought of to address the issue of exposed rods struck me as over-engineering the problem, so I will most likely get a thicker gauge rod and leave it at that.
I am shooting for a March\April launch, once El-Nino has had his run and things calm down a bit out here.
I will update the progress here, and also will be updating my twitter feed.
-
First water test of Solarbuoy
10/05/2017 at 07:14 • 0 commentsTesting Aidan (the 200 watt solar electric "solarbuoy") from 2015:
Finally was able to get one of the bots out onto the water. For this test, I chose an area of San Francisco Bay that is subject to strong currents during the tide changes. As the tide was going out, the current was about 3 knots. The bot did fine. There were plenty of settings to tweak and a few adjustments of the Pixhawk PID had things working smoothly.
Some takeaways from the test.
Turn radius: Once I threw the switch into autonomous mode, I notice some squirrelly behavior from the bot. Checking my list I realized that I still needed to verify the turn radius. I originally estimated the turn radius to be about 3 meters. I was waaaaay off. The radius turned out to be around 7.5 meters. Once I updated that little nugget, the bot handled the waypoints with ease.
Weight: Getting weight distribution right can be a pain. I had to stop the bot on the water a few times to adjust battery/ballast positioning so the bot would track better.
Overall a successful mission and One step closer to launch!
-
Pacificbots fleet
10/05/2017 at 07:03 • 0 comments2017
Welcome.
There are now Four variants.
Solarbuoy: For lack of a better name, it is a 200 watt solar powered electric motor self positioning buoy.
Sailbuoy: is a wind/electric driven solar powered self positioning buoy.
Wavebuoy :is a wave propelled autonomous vehicle. There is also an electric motor. IT is solar powered via 50 watt panel. Standard compliment of instruments
Drifterbuoy: Buoy is meant to be dropped by vessel into position. It will then drift with current. 20 to 25 watt solar panel. Standard compliment of instrucments
PacificBots
Research platforms that are intend to be used as self-positioning buoys to monitor the ocean environment.