 Andreas Hoelldorfer
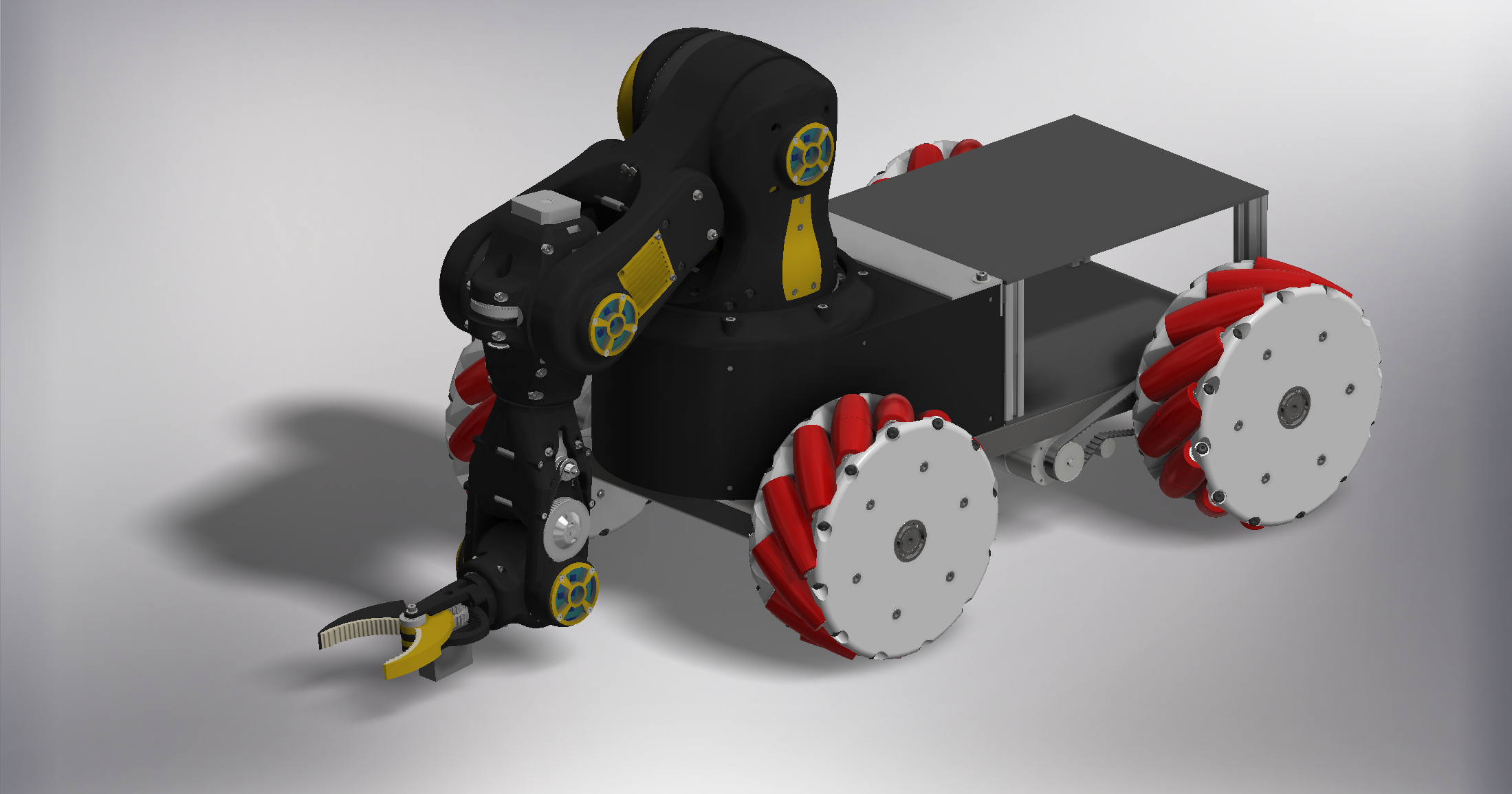
Andreas HoelldorferThat's where I'm currently heading ( My 2019 ) :
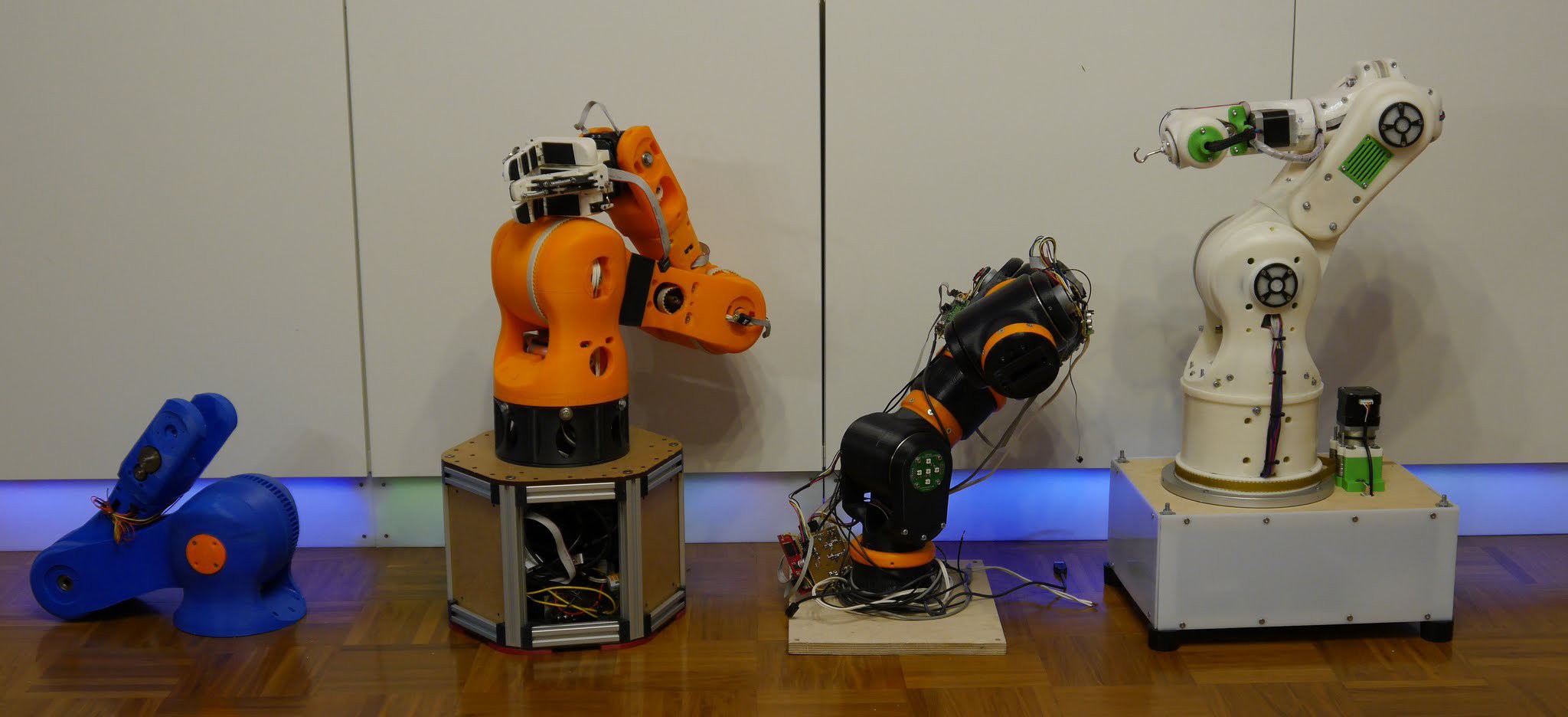
The four robots I build since this project started.
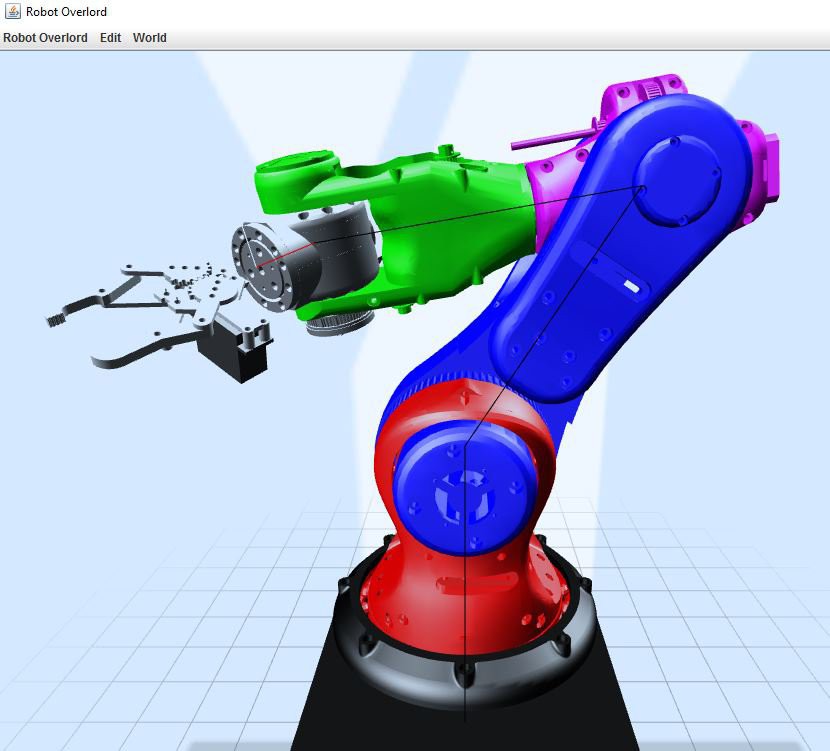
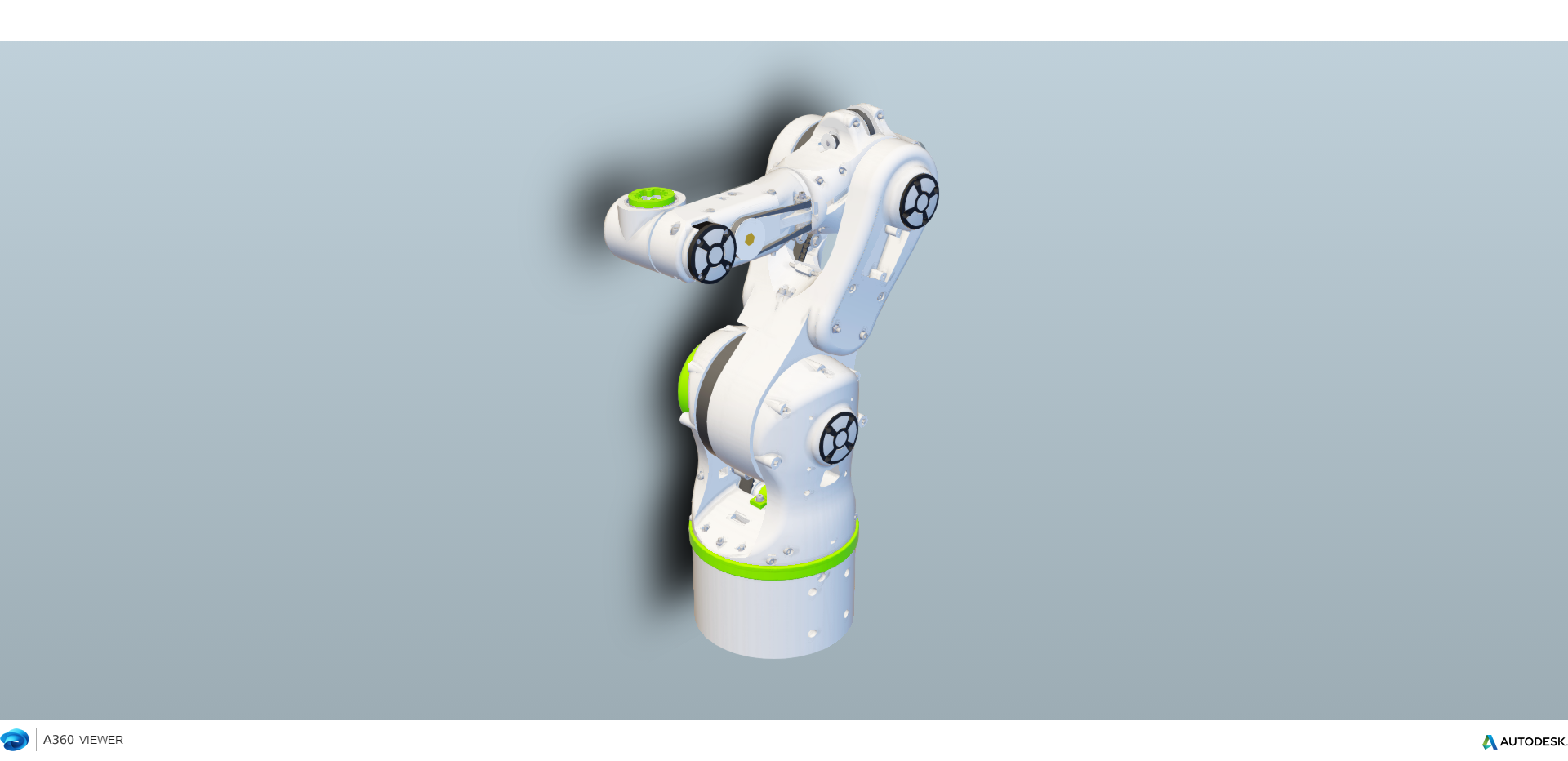
 Version 4 now nearly done and in testing.
Version 4 now nearly done and in testing.
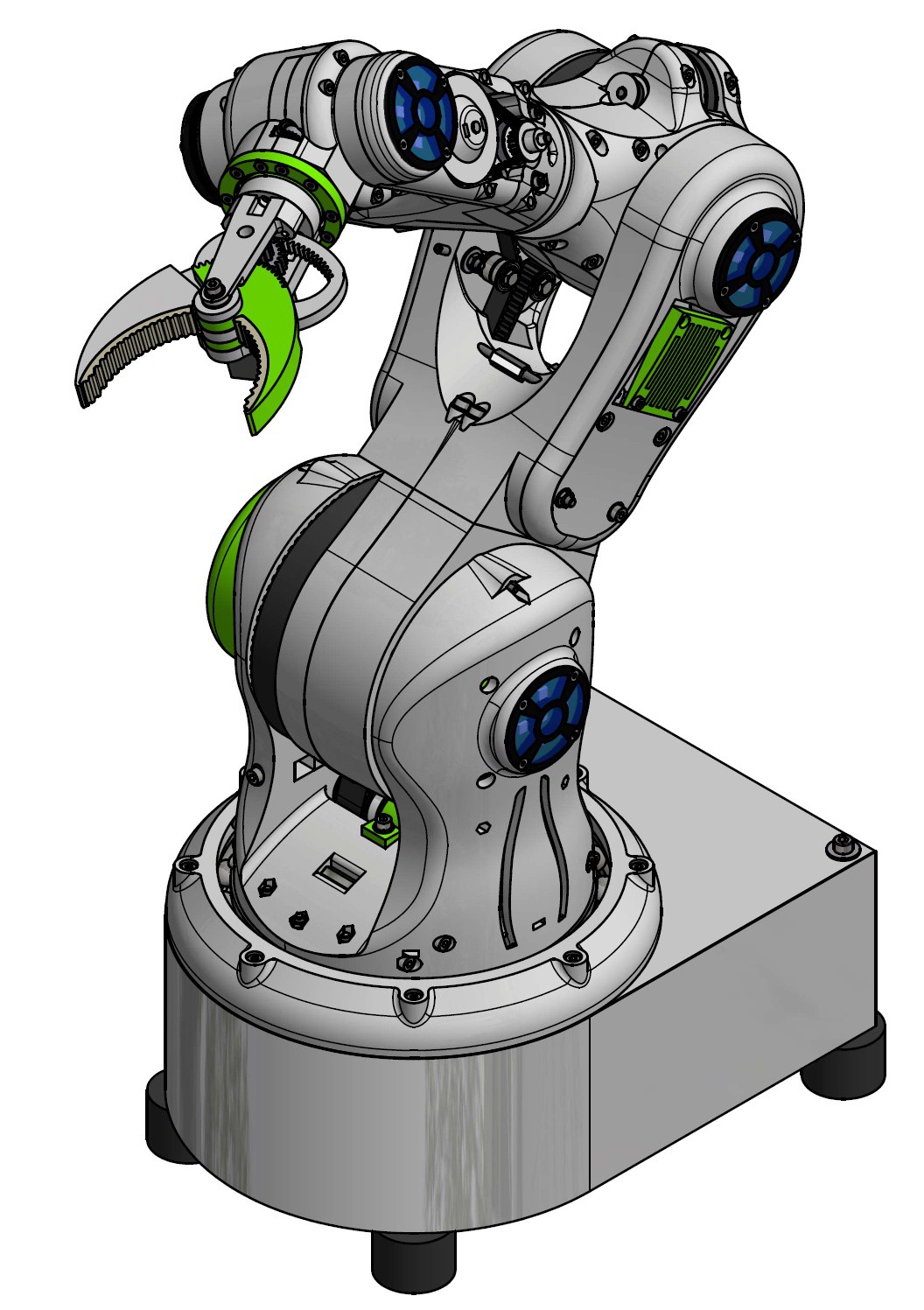
Take a look at the Gripper I designed for my Robots:
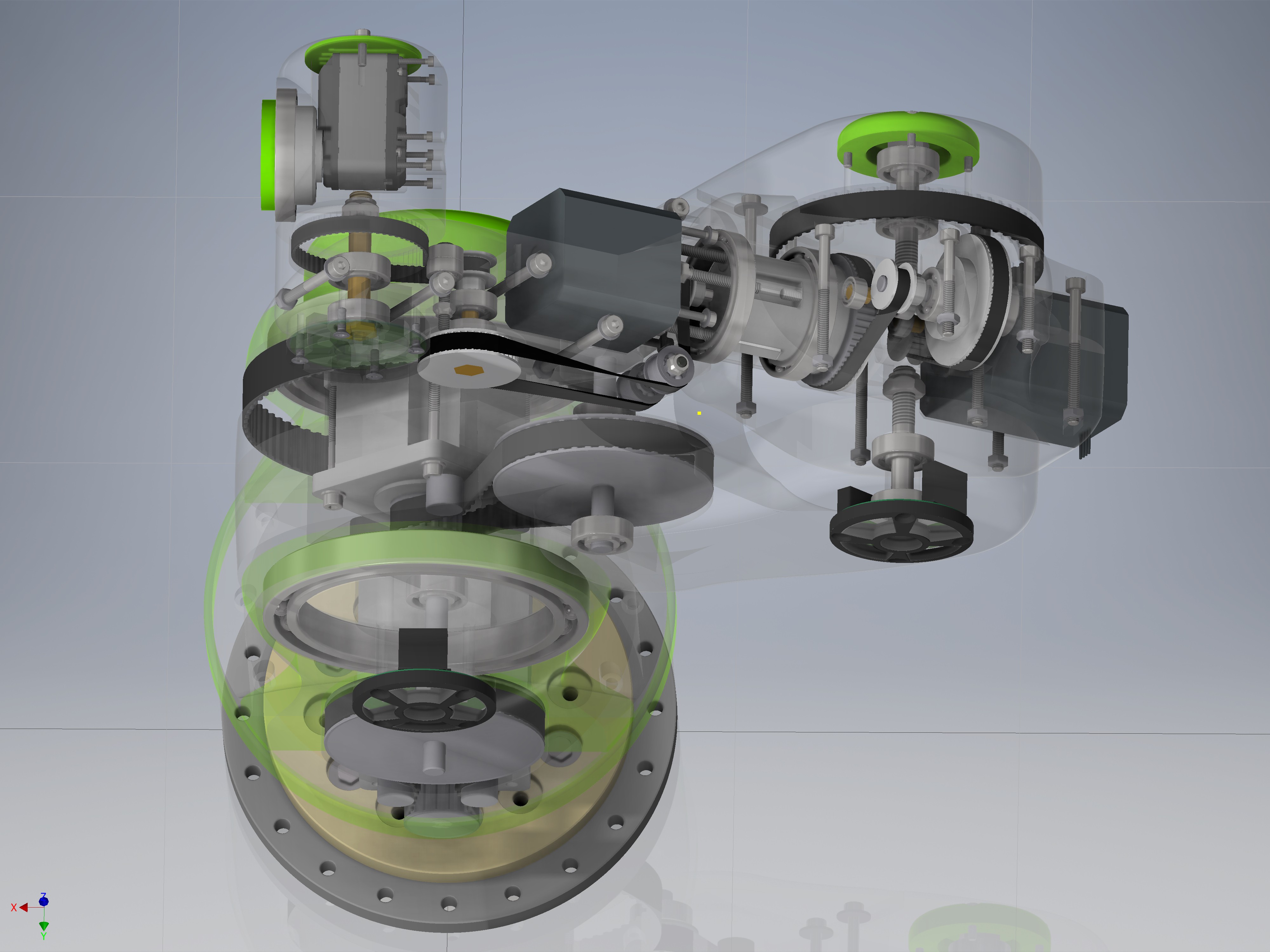
Version 4 is now nearly complete:
I also started uploading the files on github:
https://github.com/4ndreas/BetaBots-Robot-Arm-Project
And a components list for version 4:
















 AdityaPrakash23
AdityaPrakash23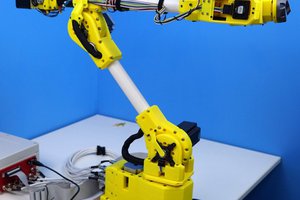
 Dan Royer
Dan Royer
 Pavel Surynek
Pavel Surynek
 BTom
BTom
Your robot arm seems to work well enough to be able to repair itself. At least it should already be possible to teleoperate one or two arms to command a computer-controlled repair mission. I imagine it's possible to design a simple process which replaces a damaged timing belt, all within a reasonable amount of time and with minimal human input. Thanks for sharing the source files!