0%
0%
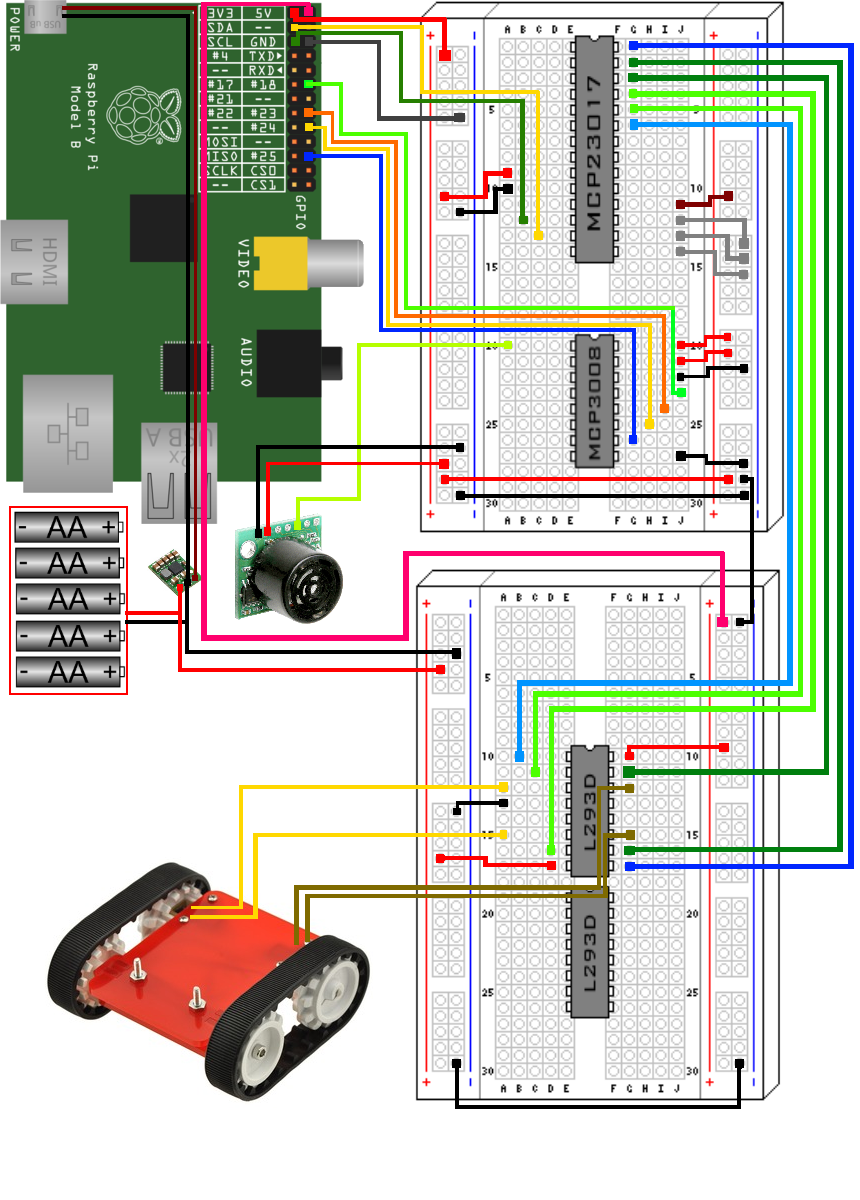
R.Cerda - a simple and cheap Raspberry Pi robot
How to build easily and at low cost a robot based on a raspberry pi
 Audrey Robinel
Audrey RobinelBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 See you soon!
See you soon!

 Limenitis Reducta
Limenitis Reducta

 prof_braino
prof_braino
 Dejan
Dejan
Sorry for the mistake :)
I have the french auto-correct installed, but i will install the english one! As of now, it marks all words as mis-spelled, causing me to make even more mistakes! I'll adress it as soon as possible, thanks for the notice.