 Les Hall
Les Hall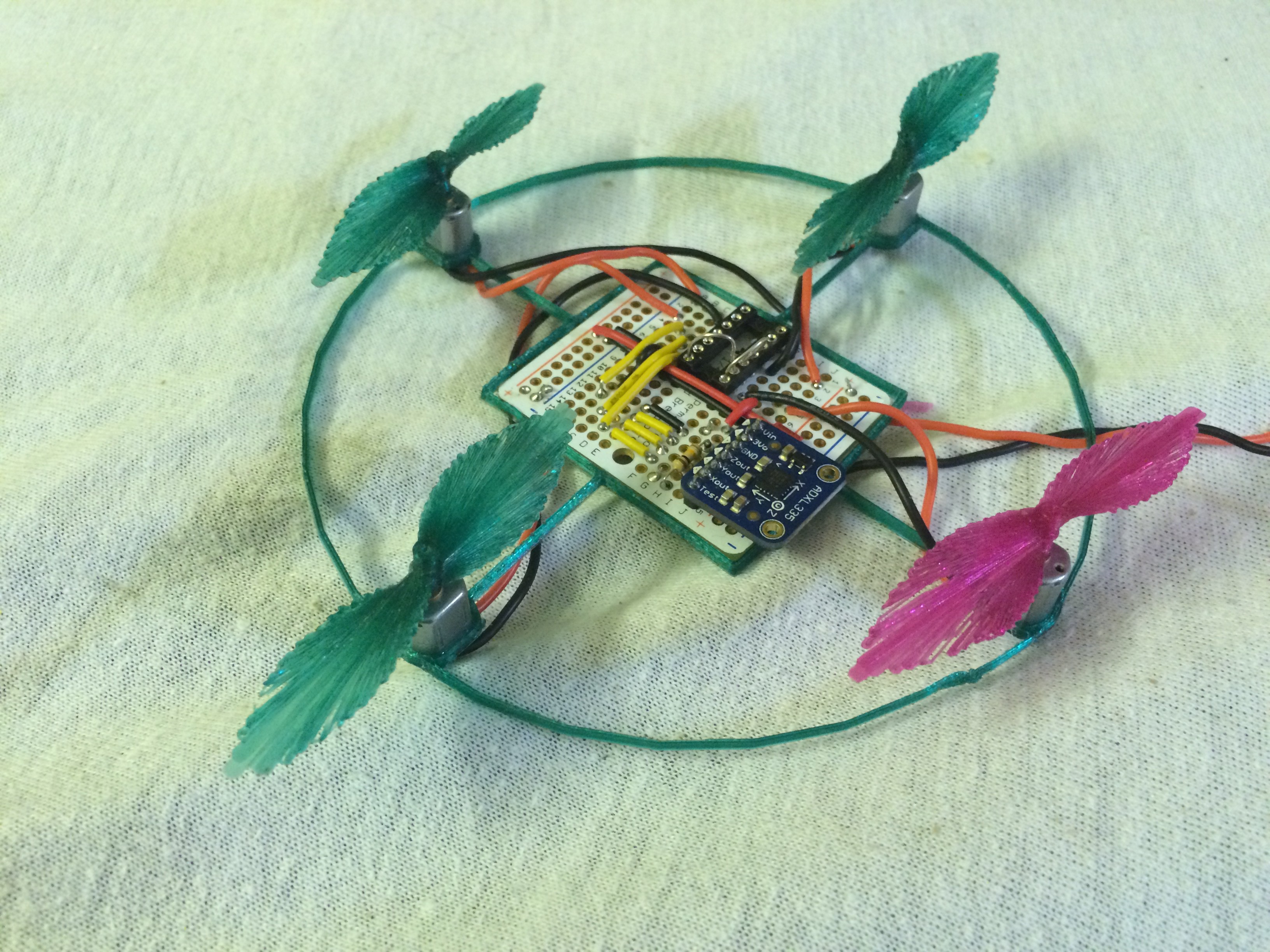
So the birdcopter has served its purpose and that was learning lessons. The first is that I do need a driver, the 40mA from the processor is insufficient to drive even these tiny motors. I have always wanted to drive directly from the processor and this attempt proves I cannot do that. Of course we all knew that but I had to try.
Next up the motors may not spin fast enough to generate enough lift. I will try some additional prop designs but as it seems there is insufficient lift. Mostly because the circuit board is too heavy (it is durable, thick fiberglass, not sure why I was thinking it could be the basis of a flying bot.
Finally as predicted the props do not move enough air. I will attempt to come up with a printed prop design that does. The photo shows a 4.5V (three AA cells) power supply directly driving the pink propeller and it does not lift the craft when balanced on the center.
So more work to do, I learned a lot and I will tinker with this some more before calling it quits and going with a new one. Having fun!
Les
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
That photograph is pretty... cool.
I'm not sure I understand what you mean about the pink propeller balancing on center. But I'm sure you know, part of what makes quadcopters as ubiquitous as they are is the fact that there're *four* props to make for additional lift.
I followed @frankstripod here... so I'll have to look around the rest of the project some more. This picture, though. I really dig it. Excellent entry into an as-yet unexplored project.
Are you sure? yes | no
well the propellers just aren't moving enough air to lift the craft. Part of this is due to the shape of the propellers and part is due to the weight of the circuit board. I'm going to try to make the props have more lift as I now understand their nature better. More to follow.
Are you sure? yes | no
...and, still going through the backlog in my feed, so can't say I've read your description, etc, yet... But, those look like regular hobby-motors to me... There are *much* more efficient motors these days, in terms of mass... (There's a few reasons quadcopters didn't exist 20 years ago, batteries, sure... but motors!) Maybe I'm just grasping at straws 'cause I like the way this looks ;)
Are you sure? yes | no
You are right on target my friend, these motors are not getting the job done. Decent motors are in the plan, but the plan won't get put in place until I get more funds which looks to be in a few months. Thanks for pointing this out! Oh, and please see my Core War 2015 project - fun in the mean time!
Are you sure? yes | no
I think it might be worth looking into LiPo batteries--they're ridiculously lightweight and can dump a ton of current really fast without blowing up (well... as long as you're careful with them). Maybe think about benchmarking a few of the commercially available small form factor quadcopters, such as the Q4?
Are you sure? yes | no
I must agree that LiPo batteries are the way to go. I won't have a budget for them for a month or three, so for now I'm just using alkaline on wires. At this point I'm thinking that the best I will do is be able to balance the copter on a stick because the motors don't spin fast enough and the circuit board is too heavy. Still, even that will be an accomplishment to be improveduponlater. For low cost definitely LiPo's though I'm curious about the super capacitor option...
Are you sure? yes | no
I am really liking the breadboard look of this thing! Would love to see it dead bug soldered as a weight solution, but that's just me. Bird is the Word!
Are you sure? yes | no
Yes, dead bug or chip art as it is called where you shape the wires like some kind of miniature wrought iron in 3D. A precursor to 3D printed conductors too!
Are you sure? yes | no