haydn jones
haydn jones-
Still Going.....
05/27/2015 at 20:59 • 0 commentsAfter drilling and cutting my teensy-lc arrived from HAD, and the servo arms were literally a headache. I found a nice design for a glue stick linear actuator, and I am incorporating the teensy as the (or an alternative) controller. I need to find out if I can use a common send pulse for multiple range finders to reduce pin count.Will update as i learn more :)
-
Project Enclosure and PSU :)
05/16/2015 at 13:01 • 0 commentsJust got these and I now have a Mega, so full steam a head.
![]()
![]()
I think it's dremel time.....
-
Progress, of sorts
04/28/2015 at 13:14 • 0 commentsI have pushed my Uno as far at it can go, and am now waiting for a mega from china, so I can connect my whole array. Looking for a good supply of tension springs as an alternative to extra gears. I wont post any images today, but my design is (will be) based on a hat. I will need a cheap 3d print service for my levers and frame at some point if anyone has any recommendations.
-
Testing parts
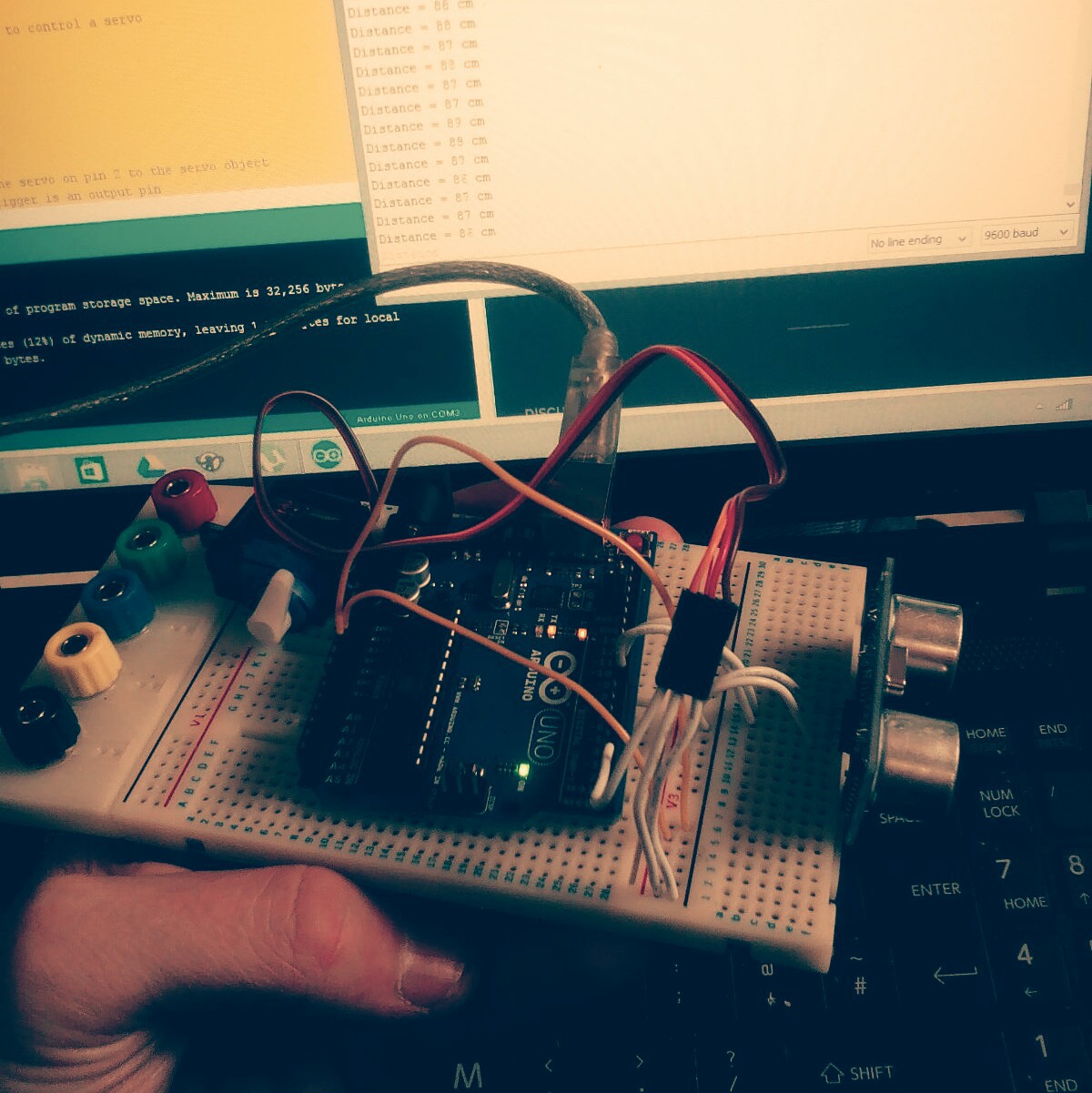
04/17/2015 at 16:28 • 0 comments/* HC-SR04 trig pin 8 echo pin 9 5v servo pin 2 */ #include <Servo.h> Servo myservo; // create servo object to control a servo int ang; // angleofservo const int TriggerPin = 8; //Trig pin const int EchoPin = 9; //Echo pin long Duration = 0; void setup(){ myservo.attach(2); // attaches the servo on pin 2 to the servo object pinMode(TriggerPin,OUTPUT); // Trigger is an output pin pinMode(EchoPin,INPUT); // Echo is an input pin Serial.begin(9600); // Serial Output } void loop(){ digitalWrite(TriggerPin, LOW); delayMicroseconds(2); digitalWrite(TriggerPin, HIGH); // Trigger pin to HIGH delayMicroseconds(10); // 10us high digitalWrite(TriggerPin, LOW); // Trigger pin to HIGH Duration = pulseIn(EchoPin,HIGH); // Waits for the echo pin to get high // returns the Duration in microseconds long Distance_cm = Distance(Duration); // Use function to calculate the distance Serial.print("Distance = "); // Output to serial Serial.print(Distance_cm); Serial.println(" cm"); ang = map(Distance_cm, 0, 1023, 0, 179); myservo.write(ang); delay(100); // 10 readings per second } long Distance(long time) { // Calculates the Distance in cm // ((time)*(Speed of sound))/ toward and backward of object) long DistanceCalc; // Calculation variable DistanceCalc = ((time /29) / 2); // Actual calculation in cm //DistanceCalc = time / 74 / 2; // Actual calculation in inches return DistanceCalc; // return calculated value }Just tested the servos with sensors as a proof of concept. Will need to work on smoothing and fine tuning the angles,possibly with gearing/levers.![]()
-
Extra sketches
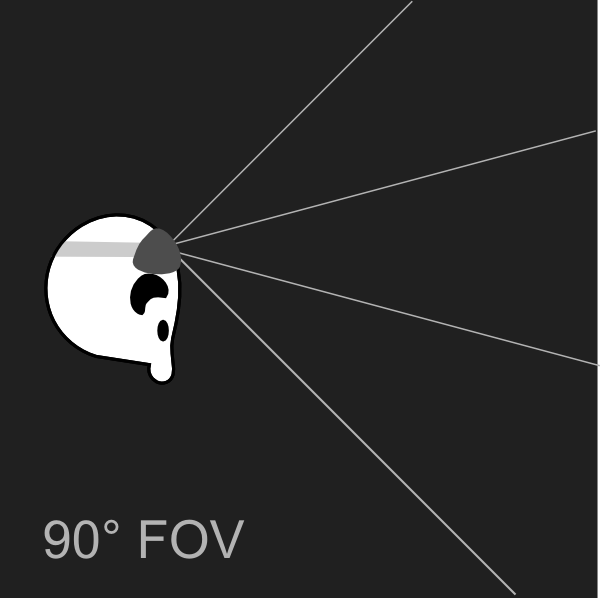
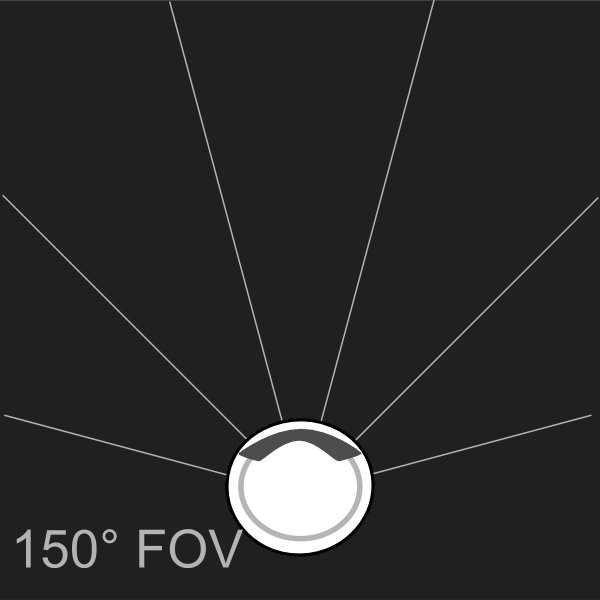
03/31/2015 at 22:19 • 0 commentsA few sketches while I'm waiting for parts. Any thoughts on the array layout?
![]()
![]()
![]()
-
parts ordered
03/29/2015 at 15:52 • 0 commentsHave ordered sensors and servos, will try to add some sketches that make sense to people other than me.
![]()
![]()
The Vision Project
A project to provide a form of "vision" to the blind and partially sighted.