 vcazan
vcazanCurrent Hardware:
- Arduino Nano atmega328p board
- BMP108 - Baro Sesnor
- 3 Axis Acceleromiter
- 2.4GHz UART tx/rx
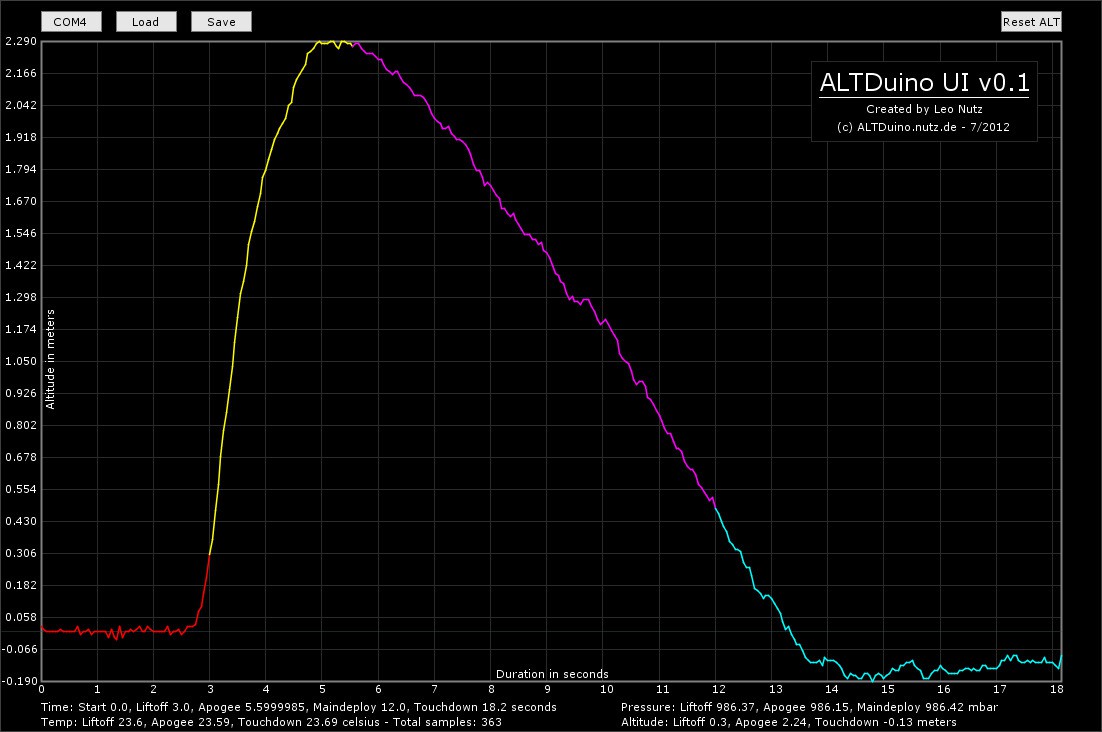
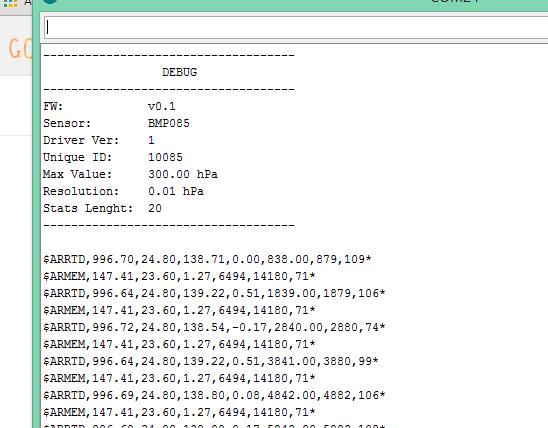
I have implemented my own protocol similar to how GPS communicates via serial to ensure that data reliability and readability. Currently I can get the altitude, temperature and max altitude using the live downlink and I have tested the downlink in my M1 launch to a max altitude of 150m. I have also implemented a function that will save the highest recorded altitude value to the internal eeprom of the arduino.
My current code is downloadable from here: https://github.com/vcazan/AltiRocket








Nice project. I've got a similar one with water rockets that I'll post soon. I wish you had posted more details.