 Mario Lukas
Mario Lukas
0%
0%
Open Source Kinect stand-alone 3D Scanner
The idea behind this project is to provide an open-source stand-alone
Kinect and Raspberry Pi2 based 3D Scanner.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 David H. Bronke
David H. Bronke
 Adamoutler
Adamoutler
 C. M. Herron
C. M. Herron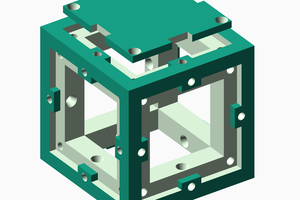
 Mihails Delmans
Mihails Delmans
are you still working on this project....