 Guus van der Sluijs
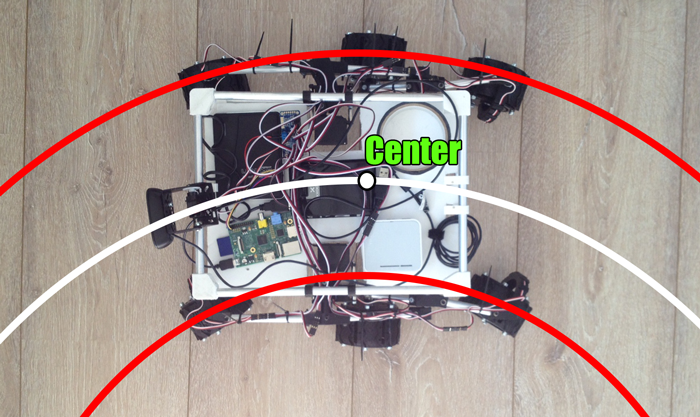
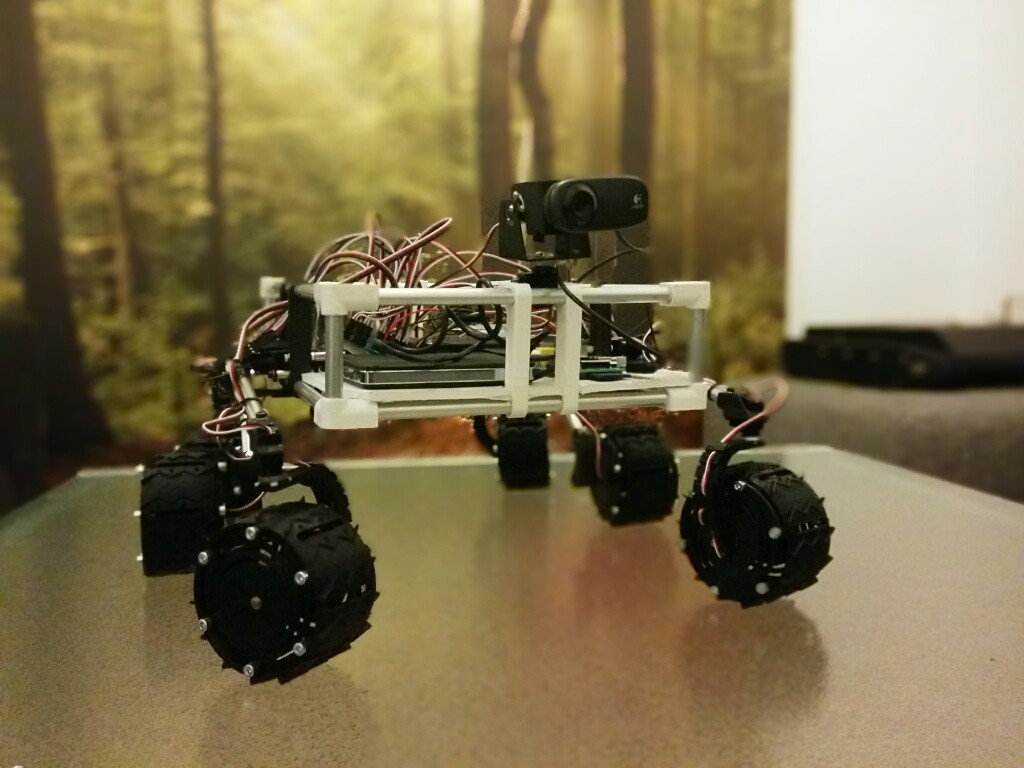
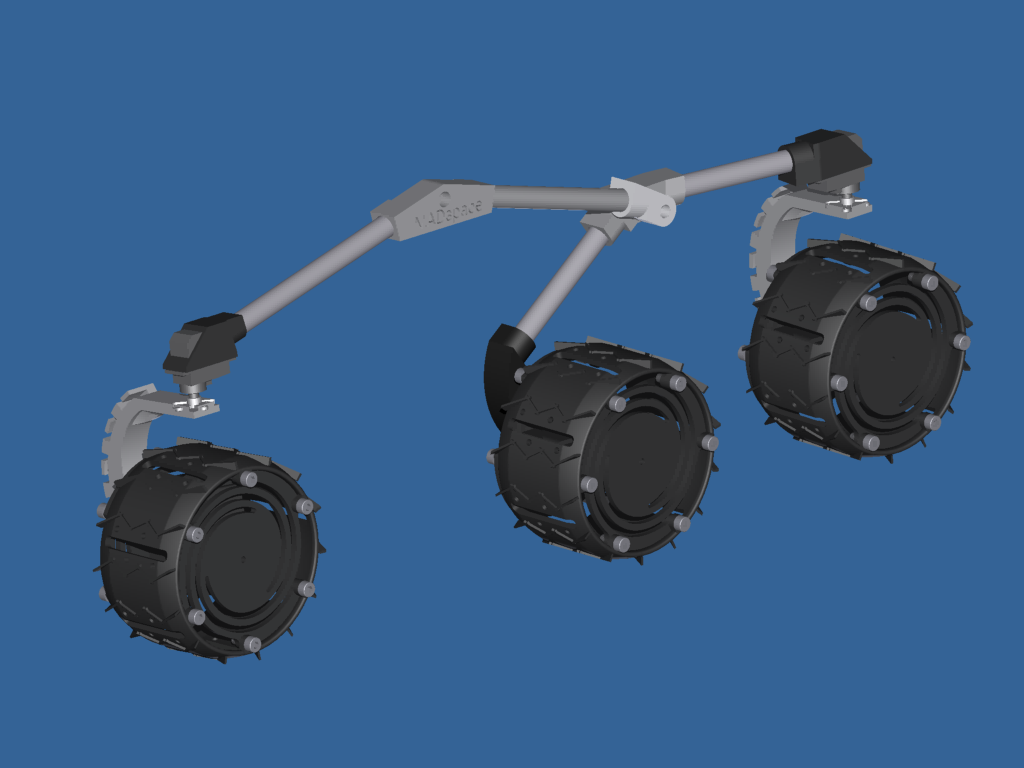
Guus van der Sluijs6 driven wheels of which 4 can steer (pod wheels)
Rocker bogie suspension (semi-active, 2 shoulder servos for body attitude)
Gyroscope
16 channel I2C PWM driver
Raspberry pi
2 logitech c270 webcams with pan/tilt
Web interface written in web.py
Two 10Ah 5V battery packs, one for drive and one for logic.
Lots and lots of 3D printed parts
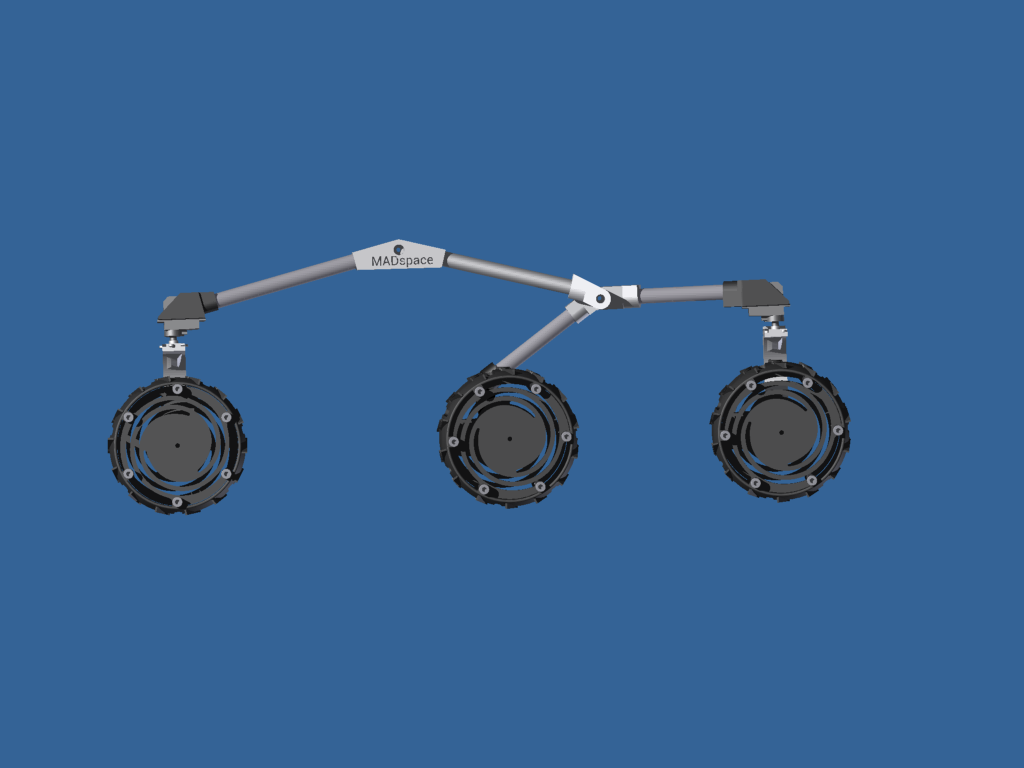
 The cross-bar is just there to keep it together for now.
The cross-bar is just there to keep it together for now. Lower right is a little drilling guide I printed, makes drilling holes in the center of the tubes easier.
Lower right is a little drilling guide I printed, makes drilling holes in the center of the tubes easier.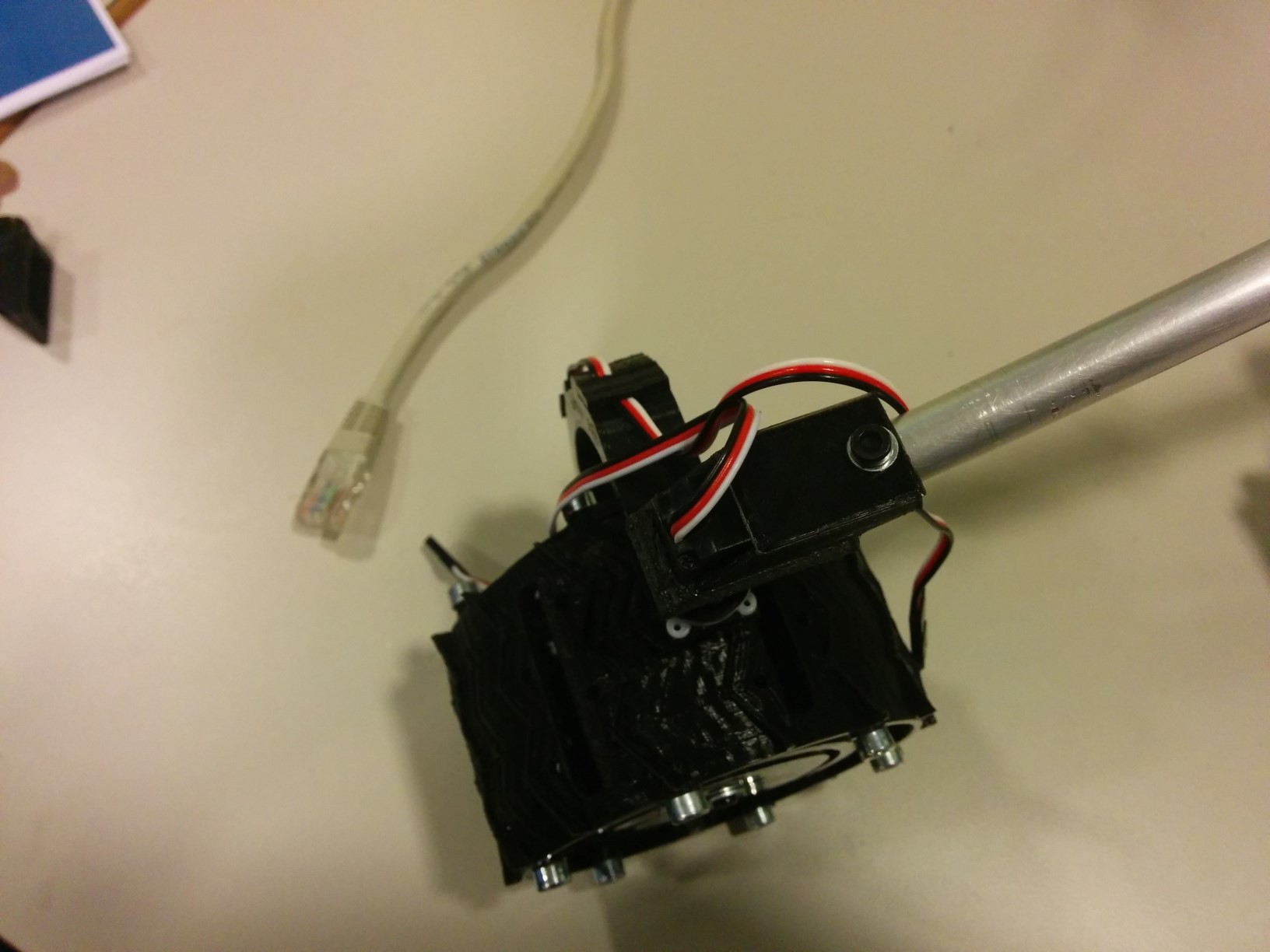 Hope you're liking these close-ups
Hope you're liking these close-ups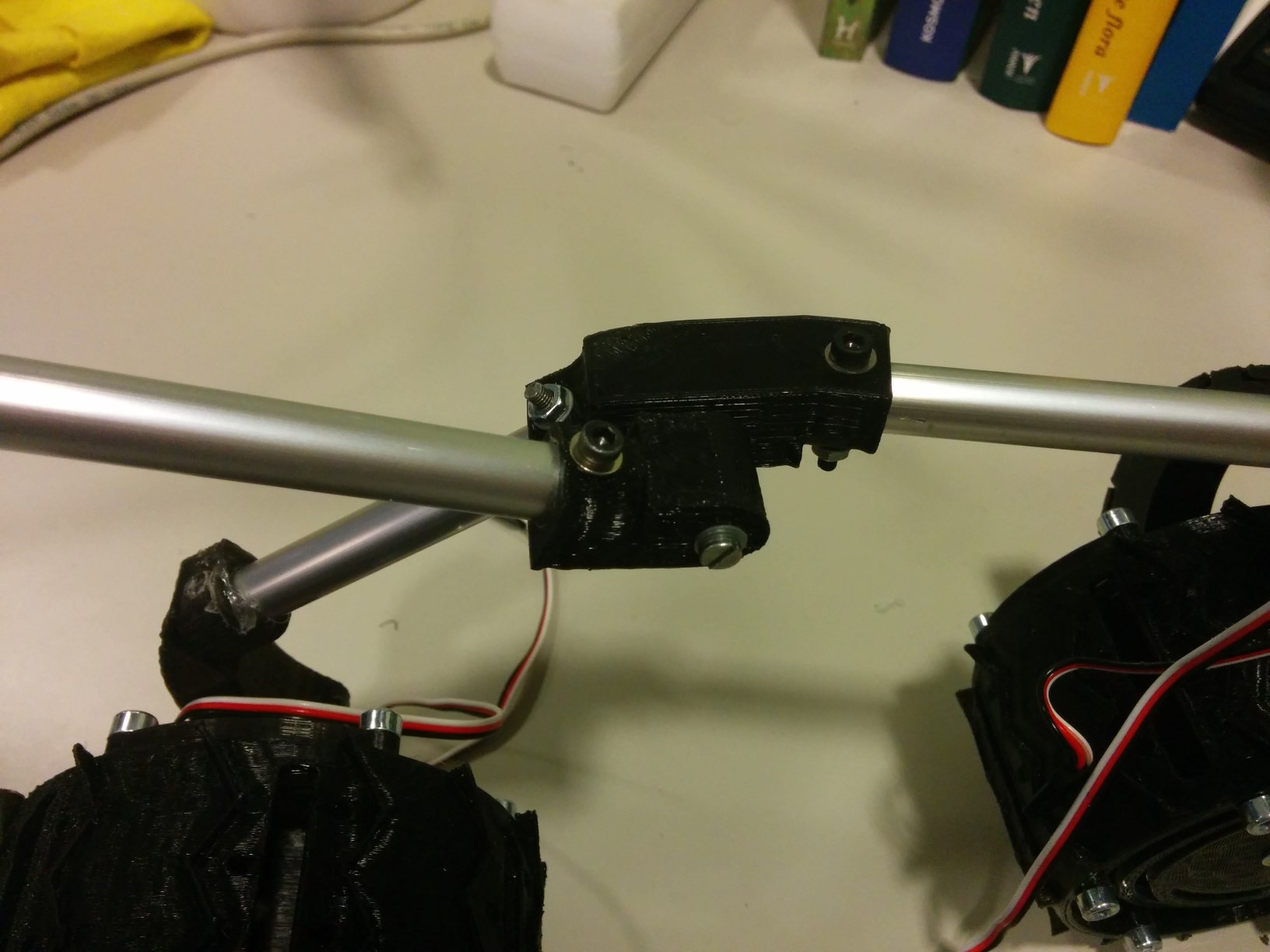
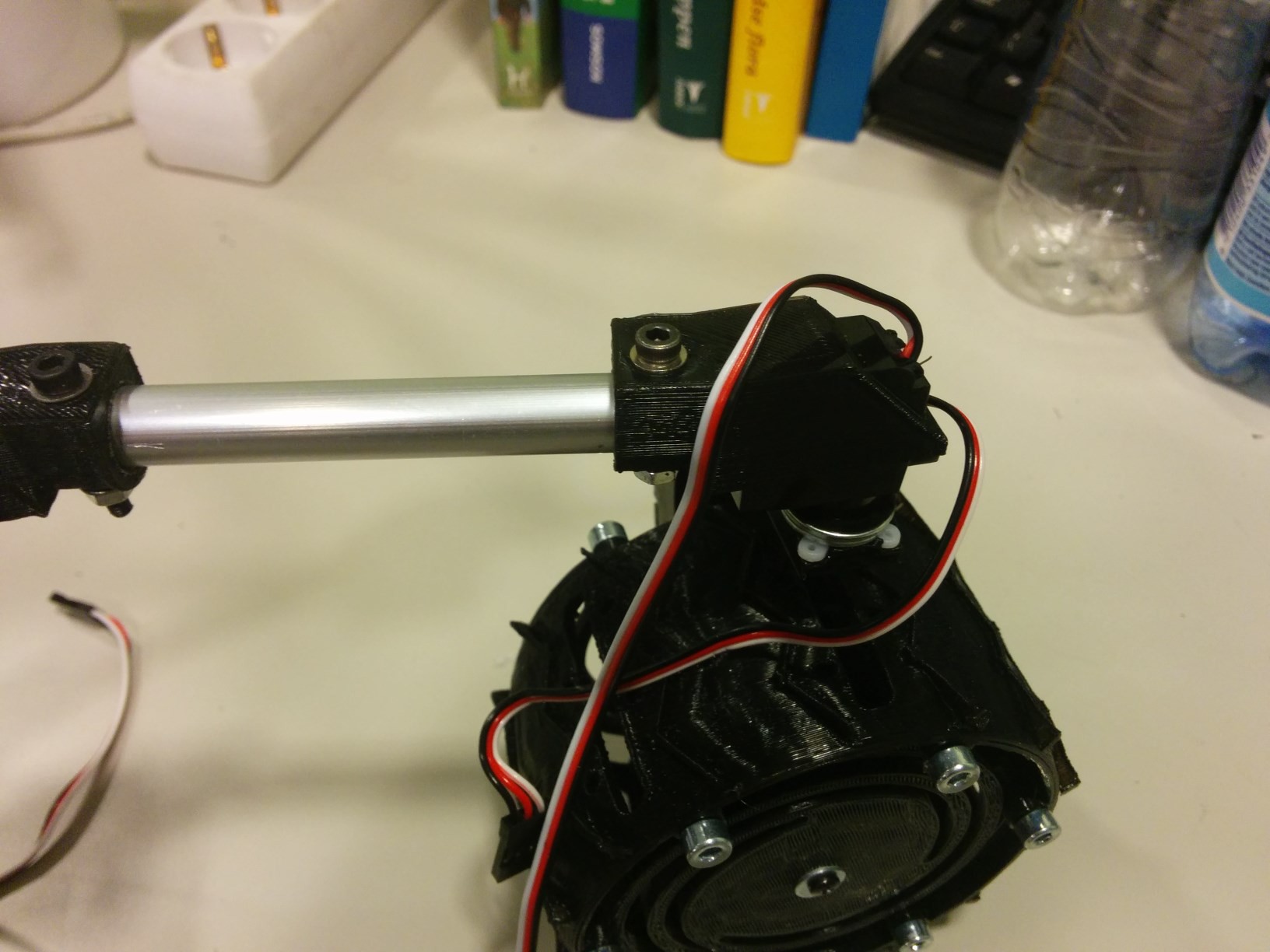
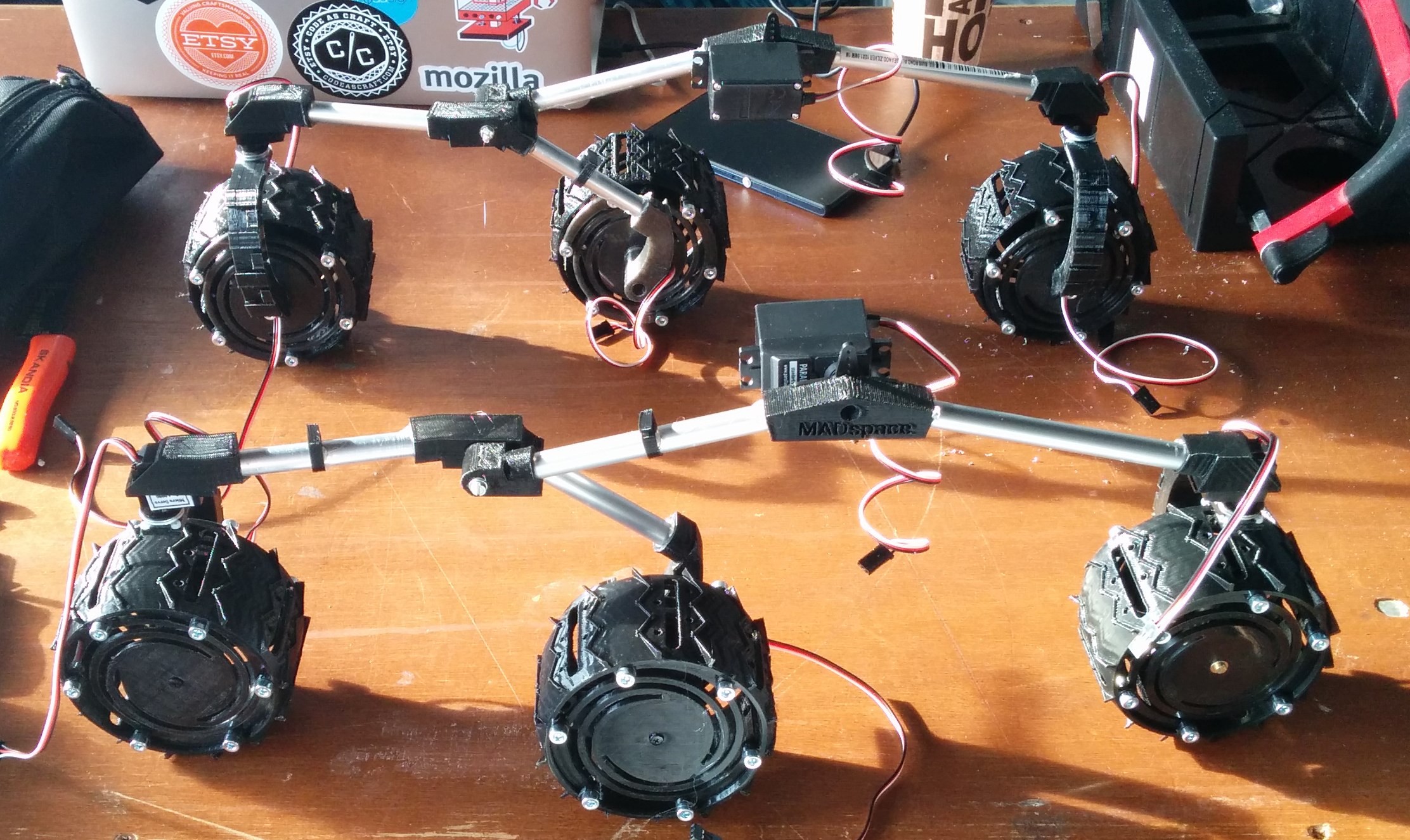 Done! I just used a normal hacksaw to cut the aluminum tubes to size. They were glued in place with some hotmelt, they come off with some excessive twisting force if I ever have to re-position them.
Done! I just used a normal hacksaw to cut the aluminum tubes to size. They were glued in place with some hotmelt, they come off with some excessive twisting force if I ever have to re-position them.

 Servo, bracket (it just snaps on), axle with bearing and whisbone. Notice how the wire feeds through the bearing.
Servo, bracket (it just snaps on), axle with bearing and whisbone. Notice how the wire feeds through the bearing. So this took quite some time and patience. I cheated a bit and also assembled the steering servos to two of the wishbones, can you spot them?
So this took quite some time and patience. I cheated a bit and also assembled the steering servos to two of the wishbones, can you spot them?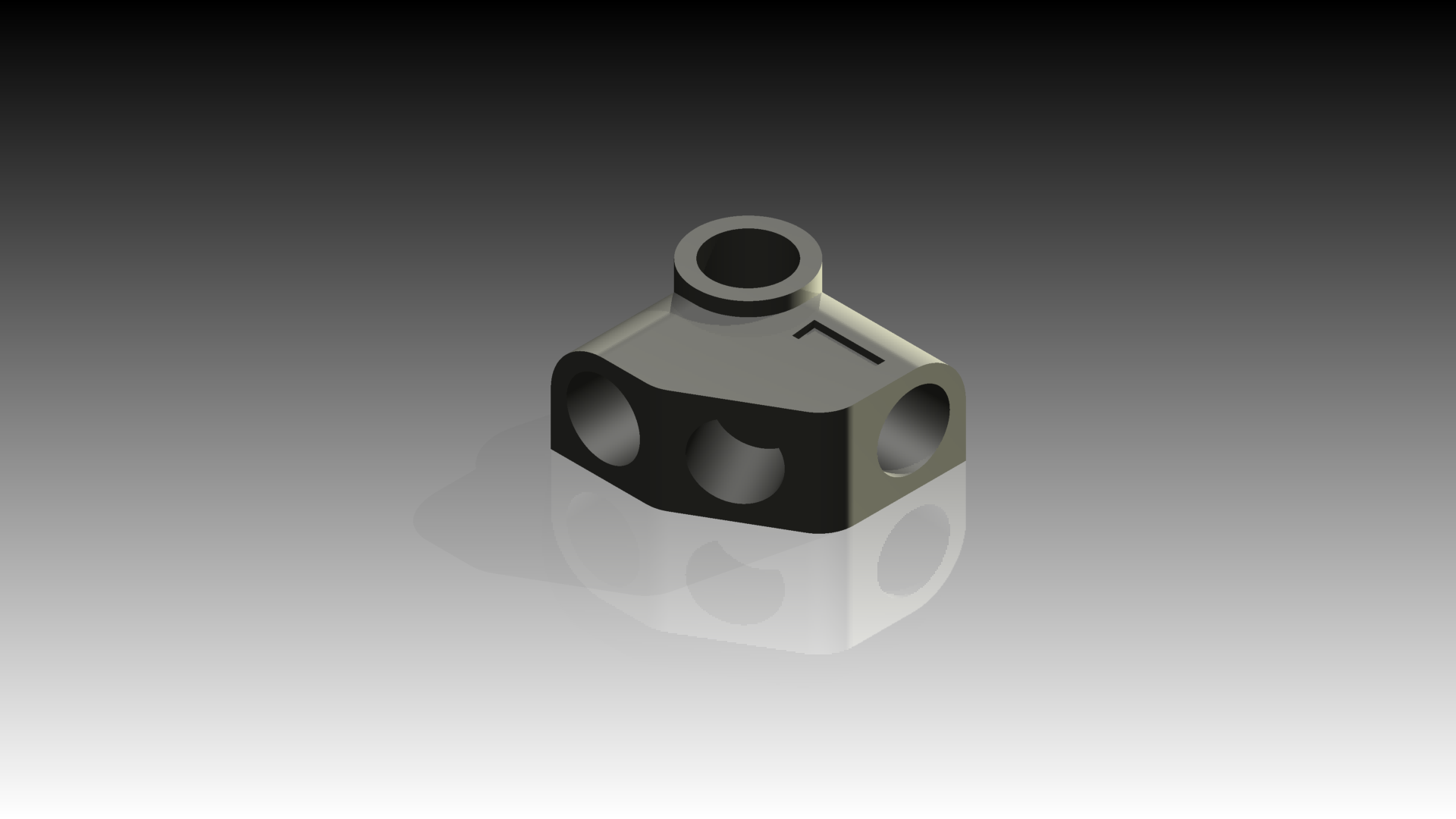 This one is labeled '1', There's also a '2', an exact mirror image.
This one is labeled '1', There's also a '2', an exact mirror image.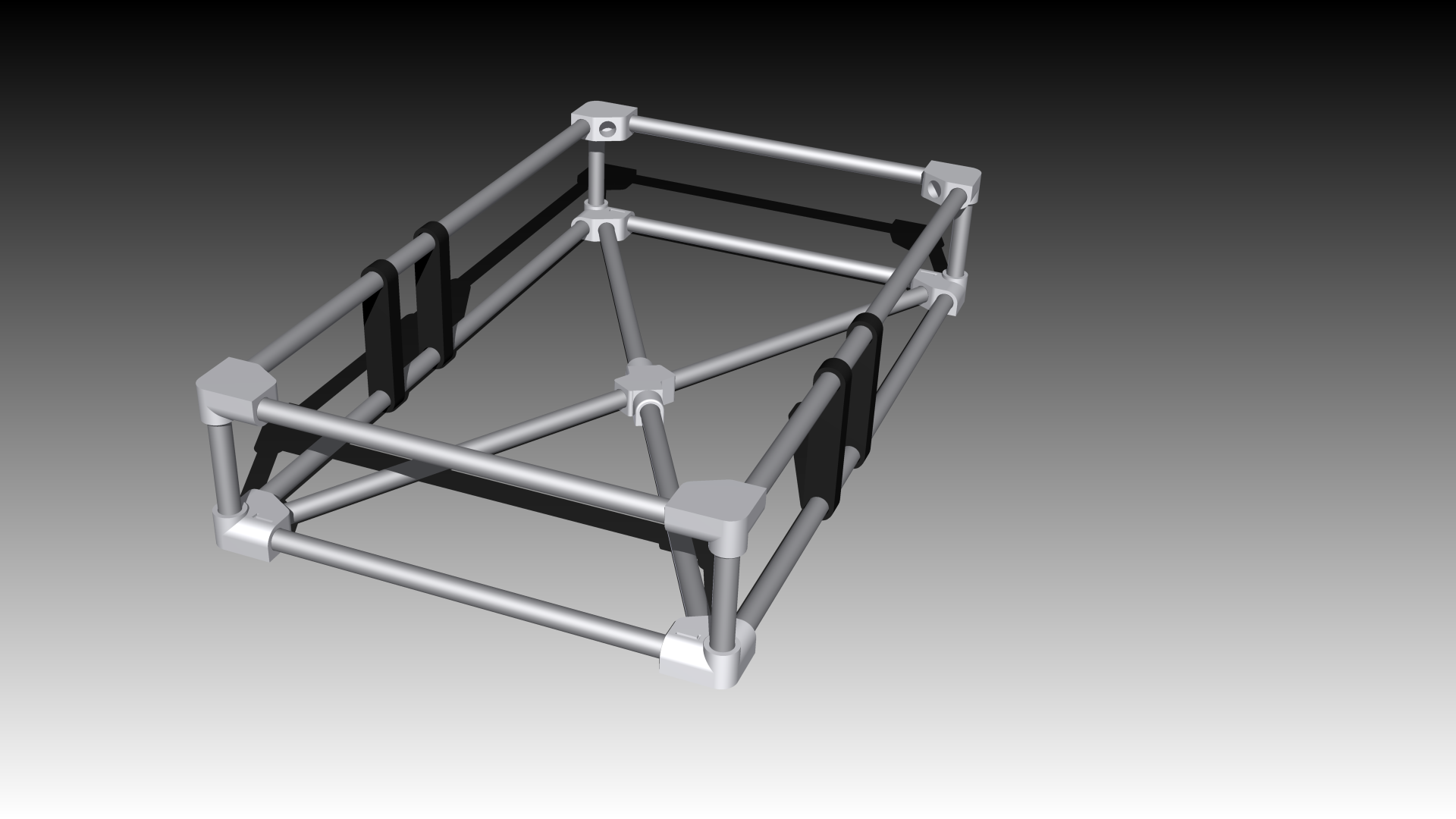 Next up: first real life assembly!
Next up: first real life assembly!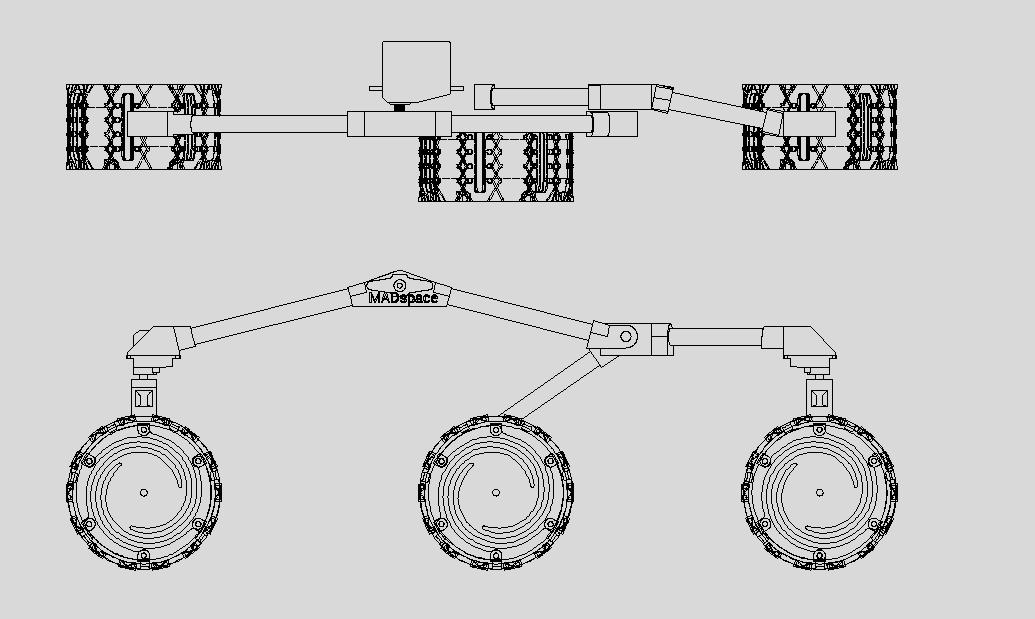
 Awesome! Next up: the body.
Awesome! Next up: the body.






 zapwizard
zapwizard
 Val
Val
 jdelbe
jdelbe
 ThunderSqueak
ThunderSqueak
can you plz send me the dimension of the rocker bogie system