Rob
Rob-
Two-phase Discontinuous Gait Testing
05/30/2016 at 07:29 • 0 commentsI've been working on a simple two-phase discontinuous gait to get Quadrup3D mobile. The gait has definitely been the toughest part of this project, particularly since I wasn't able to find many resources on quadrupedal gaits. In the video you can also see the custom stand I've designed to be able to hold Quadrup3D in the air which is great for testing gait motions!. If you have any experience with quadruped gaits, particularly with cheaper servos I would love to hear from you!
-
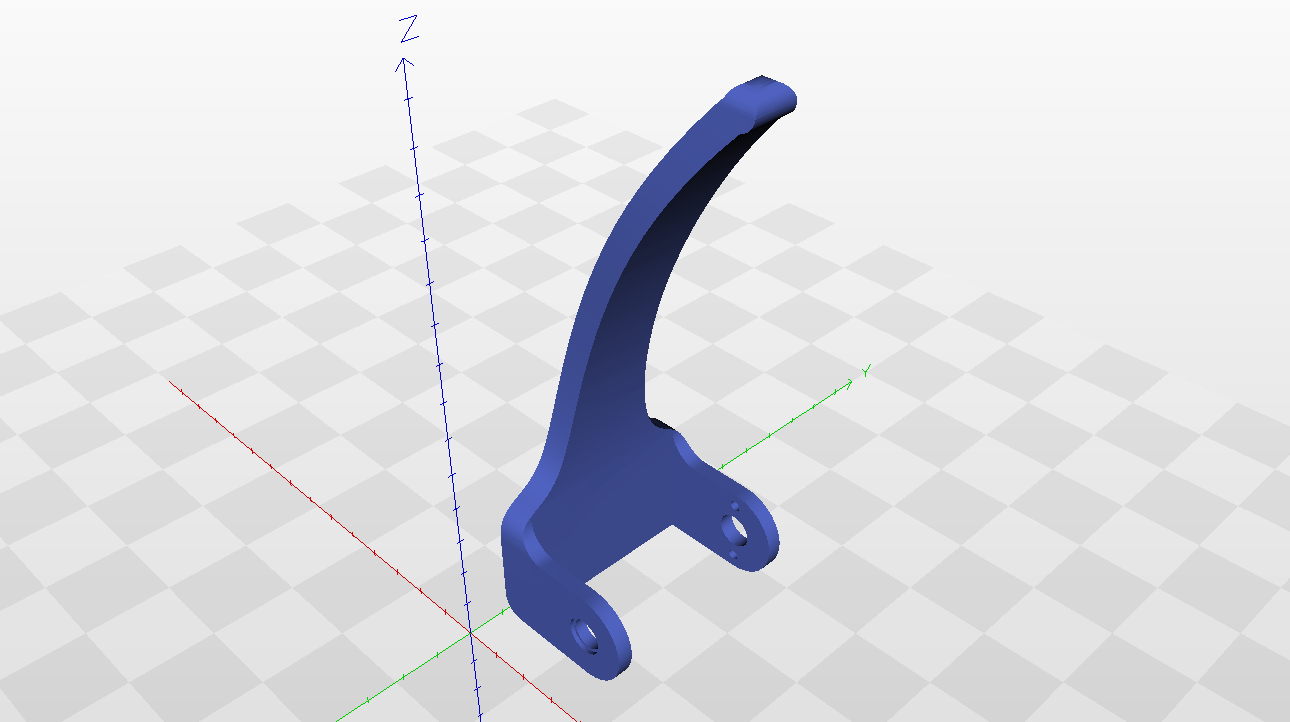
Moving the CAD to Fusion 360
05/30/2016 at 06:28 • 0 commentsQuadrup3D was designed in Solidworks, it's what I'm best at and it's available through my school making it pretty convenient. I love it, but it's not exactly accessible given the high price tag. Anyone who's downloaded some cool thing from Thingverse has probably run into the annoying problem of not being able to easily modify the design. To make sure everyone can change or contribute, I'm going to be porting the whole thing over to Autodesk Fusion 360 which is available for free to hobbyists. Hopefully this won't take long!
![]()
-
STL Release
05/30/2016 at 06:10 • 0 commentsGot a printer? Print your own! I've uploaded the files here on the project page and I will be adding them to Thingverse soon with print recommendations. The shoulder and the electronics are the only parts that require some support. The others will print great without support. The parts list will be added in soon and I'm working on instructions for assembly. Send me a pic if you print one!
![]()
-
Next Step
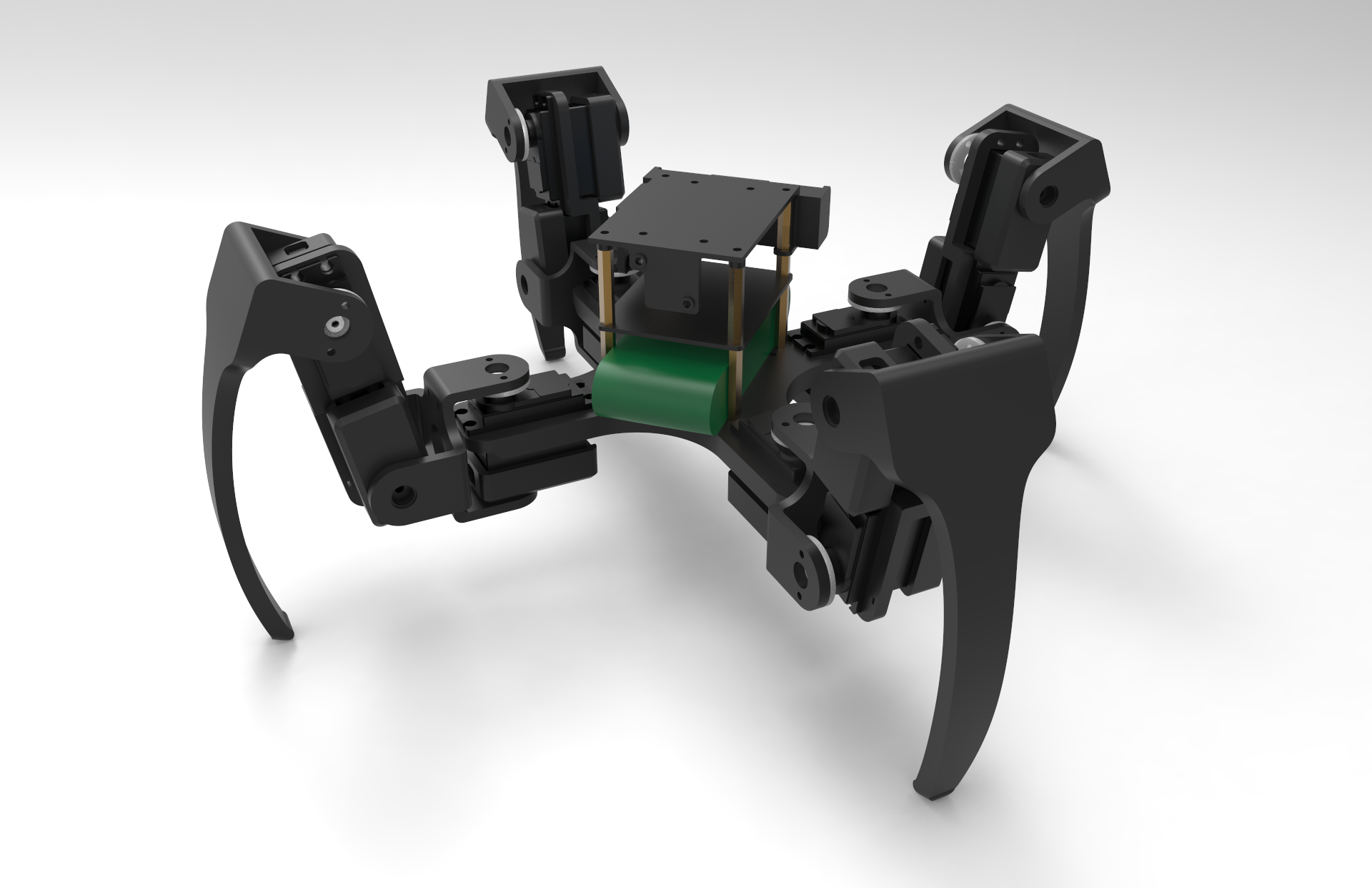
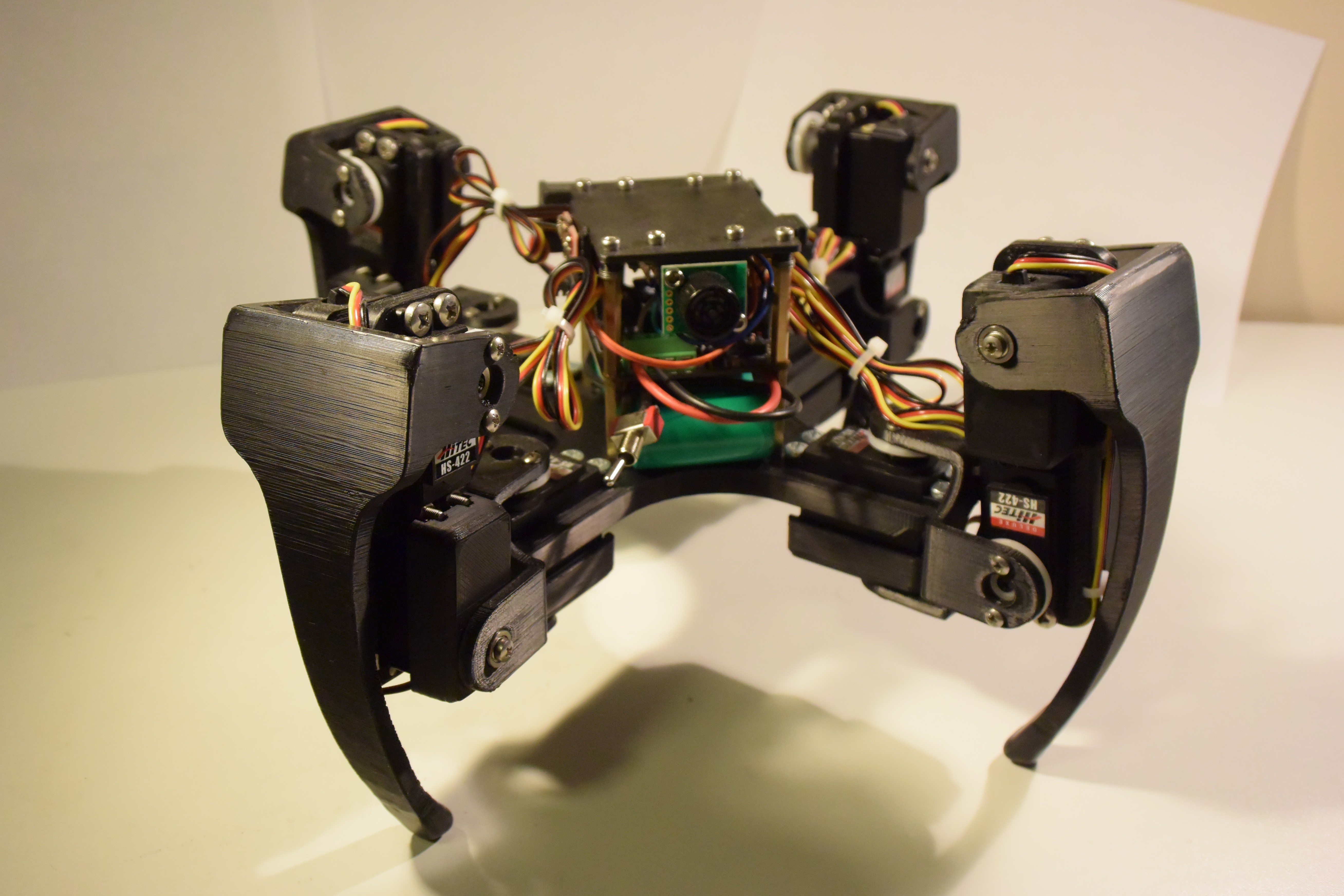
05/30/2016 at 05:57 • 0 commentsHey everyone, it's been some time since my last log! School's been crazy and I haven't had a great amount of time to record everything. Since my last log, I've made a some big changes to Quadrup3D to remove any tether to a computer and to make it completely autonomous. I managed to snag a Raspberry Pi Zero in January and I am now using a Pi onboard to control the robot instead of the serial Bluetooth module. The Pi Zero is a great choice for this project as it's small, low cost and low power. The Pi Zero is equipped with a USB WiFi adapter to broadcast it's own ad-hoc network, this works really well as I am able to SSH into Quadrup3D to upload code and I hope to be able to transmit telemetry data from the robot to my laptop in the future! I've also a small custom Pi hat with an Adafruit BNO055 9-DOF sensor to allow Quadrup3D to know it's orientation in 3D space. The hat will also be able to interface with the mounted ultrasonic sensor. Furthermore I've added a sparkfun LiPo charger with an 18650 LiPo cell for powering the Pi and the servo controller. Stay tuned, more updates are coming!
![]()
-
Older Video of Body Motion
11/06/2015 at 02:39 • 0 commentsAs requested by zakqwy I attached the only video I could really find. This video is from a couple of months ago, i'll try to find time to take a better one this week. At this point, the body could be translated in all three axis with a combination of pitch, yaw and roll. In the video you can see a micro usb cable that is used to provide power to the logic board, while the quadruped is communicating over Bluetooth. Since it is being controlled by a laptop, there are a multitude of different ways you can control it. In this case I am using PS3 controller.
-
Open source
11/05/2015 at 06:39 • 0 commentsIn the coming weeks I will be releasing all the .STL files for 3D printing your own Quadrup3D. I will also be releasing a parts list, build instructions and the source code with the hope that others can help build on this project!
Quadrup3D
An affordable fully 3D printed quadruped chassis designed to be built on an FDM 3D printer and used for testing gait algorithms.