 Antonio Regueira
Antonio RegueiraHey everyone!
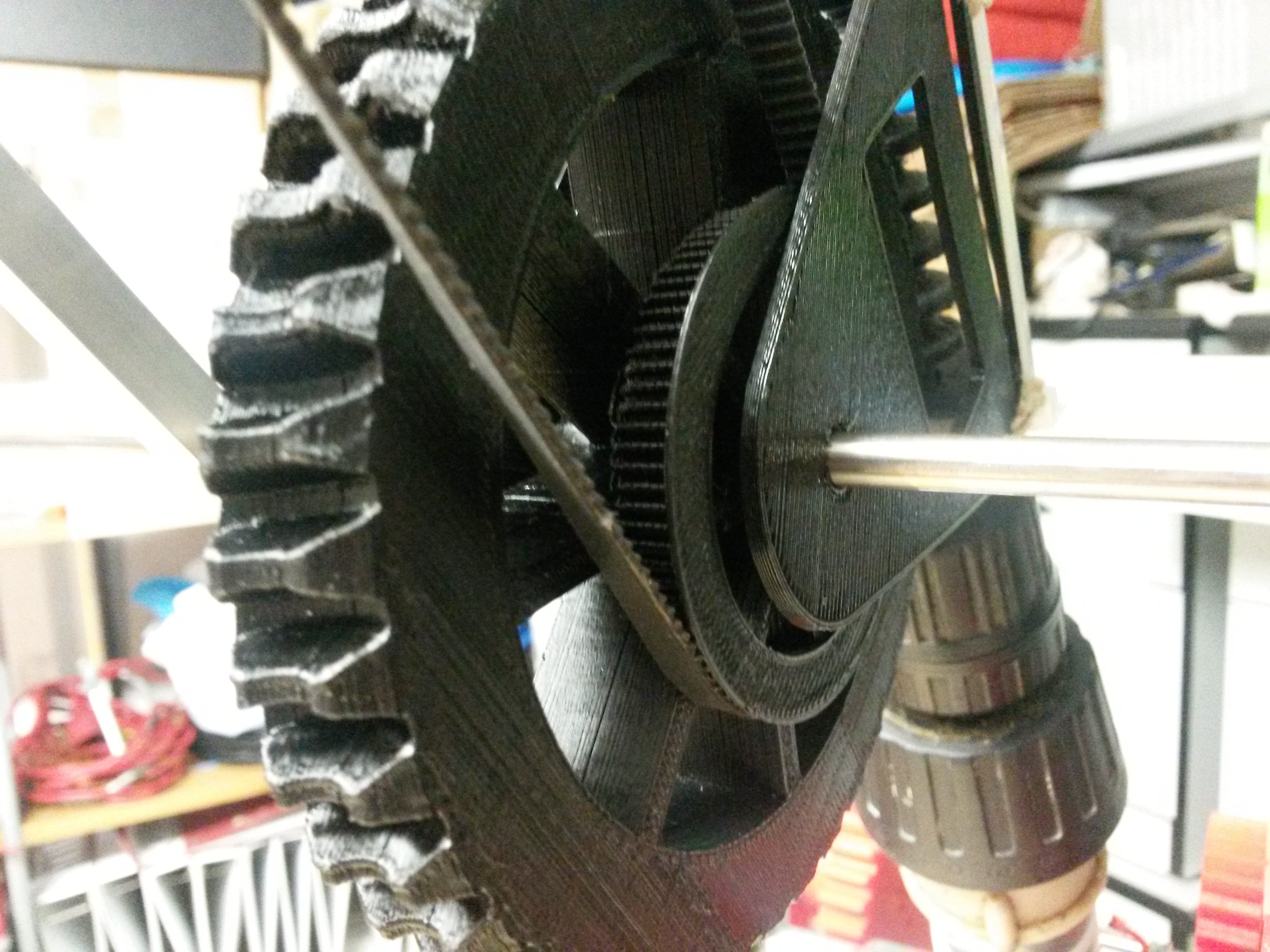
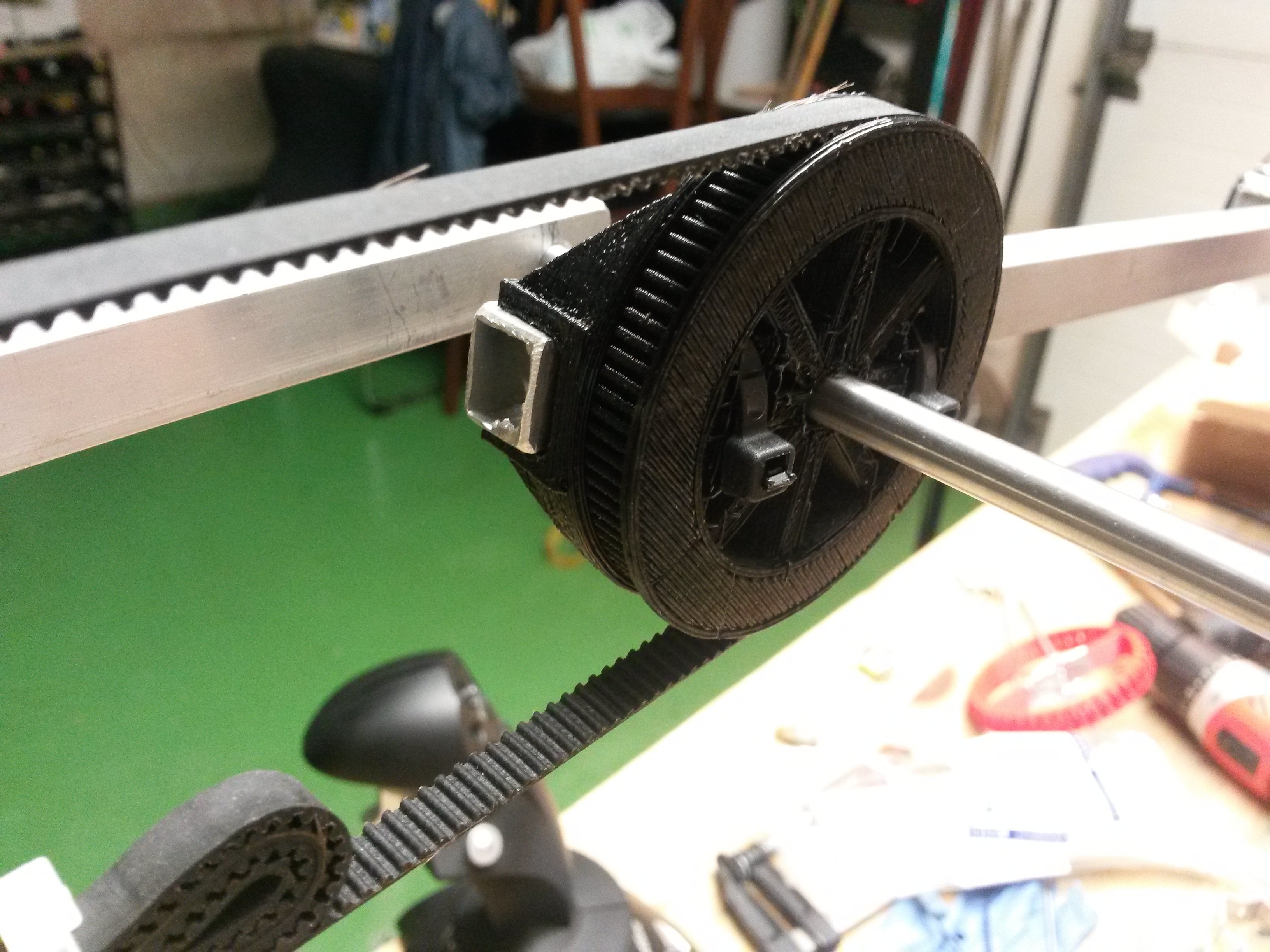
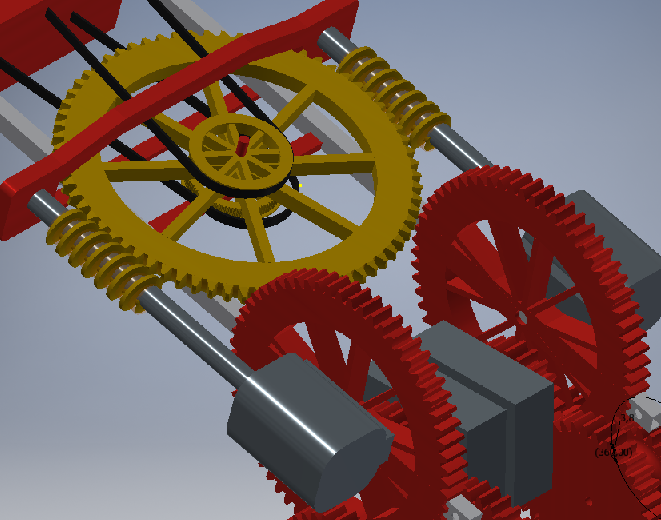
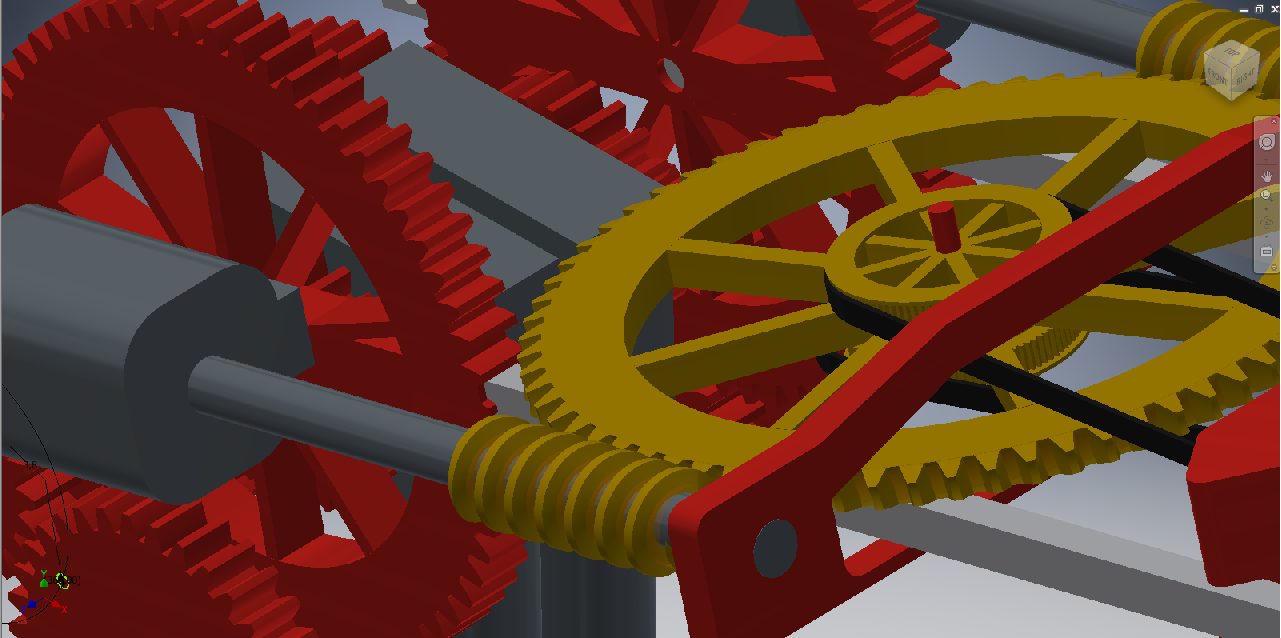
I've been working with gears and designing new ways of movement.
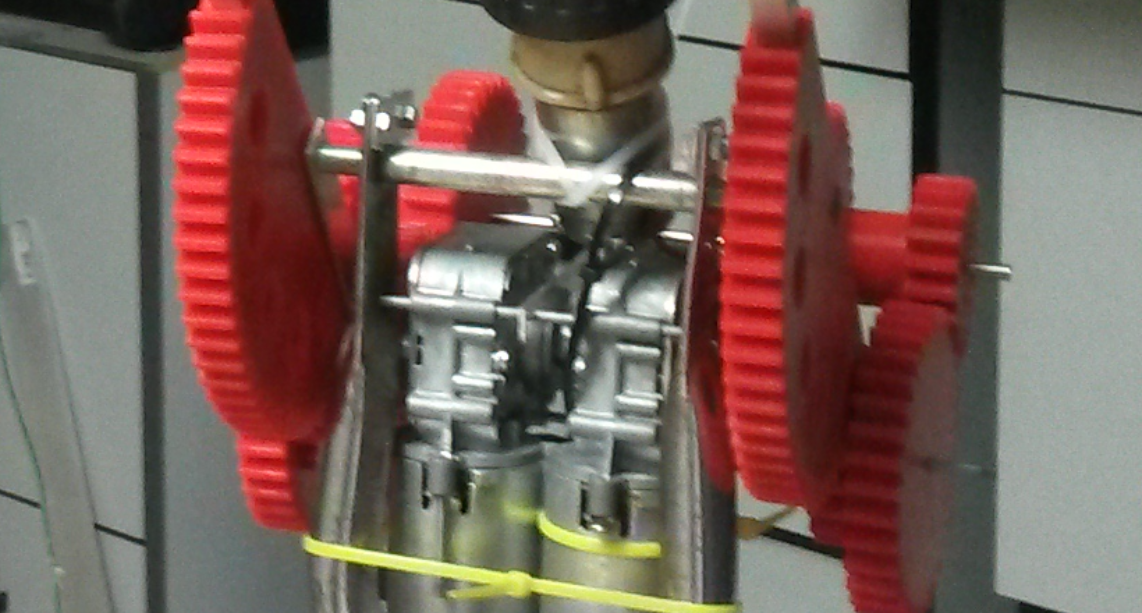
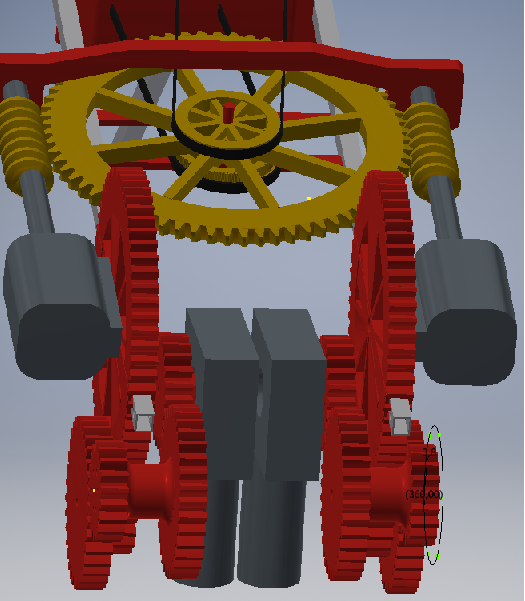
First of all i added another motor to the shoulder movement, so now, there are 2 identical motors moving this part.
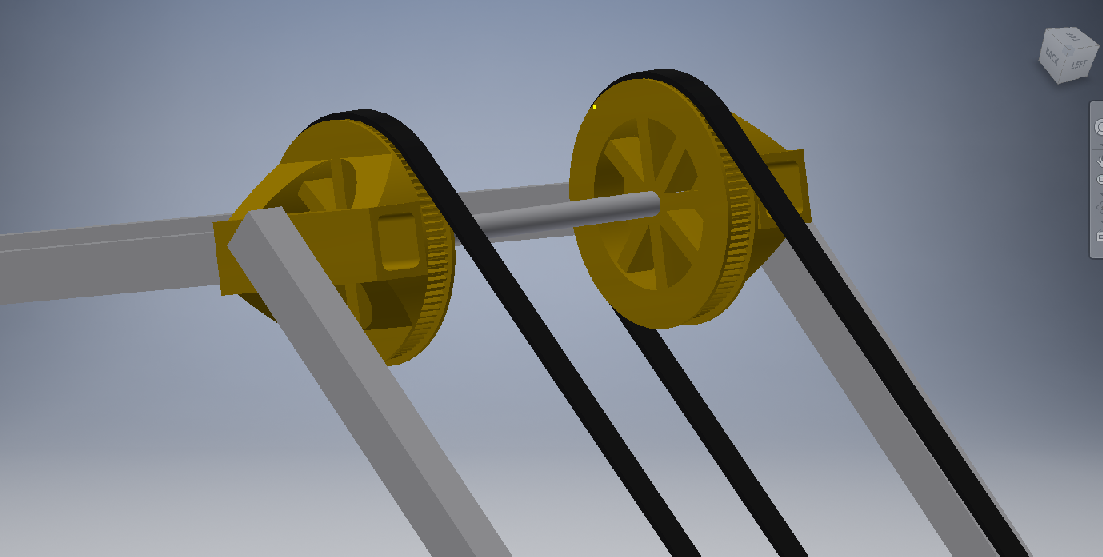
Second, i changed the motor of the elbow, now there are 2 motor of old drills and, with a worm gear and a belt it's moves perfectly.
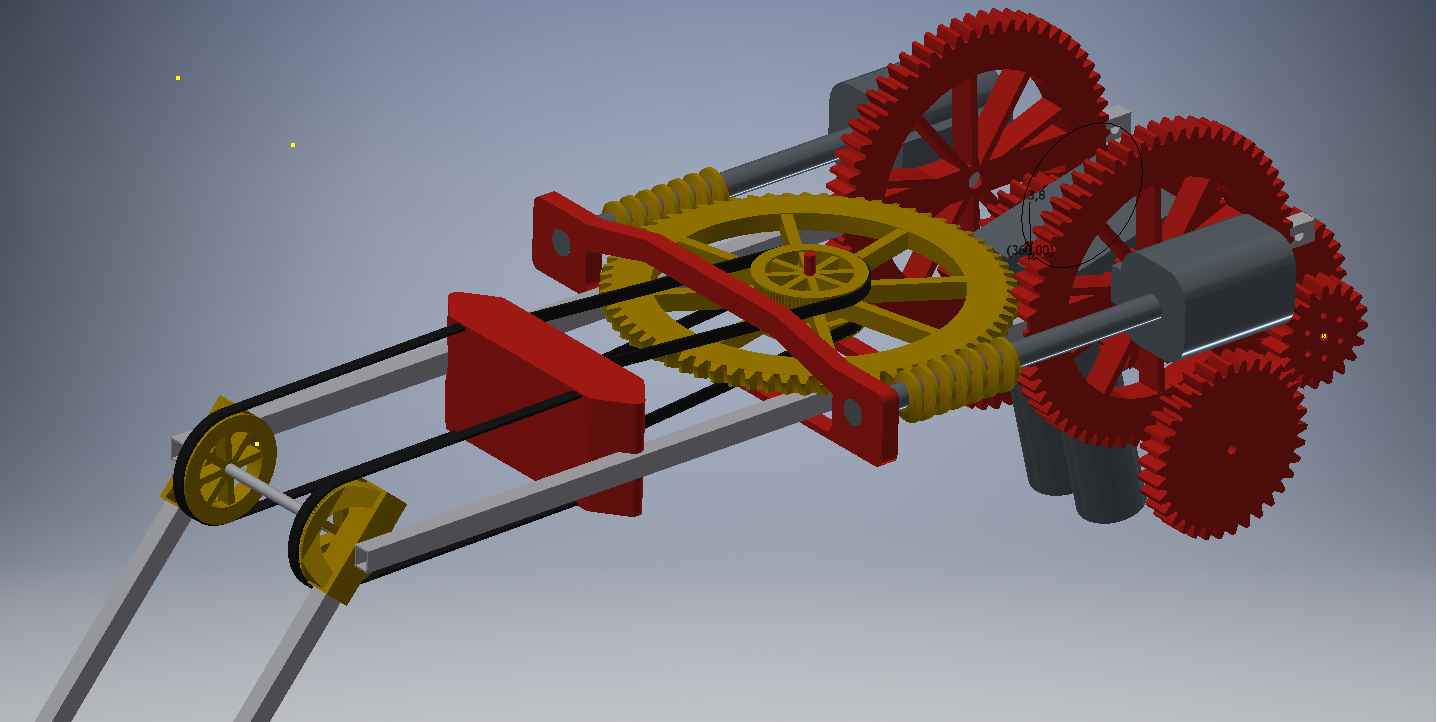
i couldn't make this real because i stayed without PLA and i couldn't print all the parts but i have photos of some parts and the entire design in CAD.
One important fact is that i tested the new assembly of the shoulder and i can pick up 2 KG at 2,5 meters of distance, that it's a lot of efforts and the gears work fine :) you can see this test before the pictures.
Because of this, i improved the movement of the shoulder and now it can rotate 330 degrees at this axis.
Probably in 1 or 2 weeks i will print this new assembly and make a video working and moving.
I reccomend seeing all the following pictures and if you have any question or comments please, let me know ;)
I upload this entire CAD file so you can download.
See you soon!

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.