 jeromekelty
jeromekelty-
Build log 12- boot schematic and code
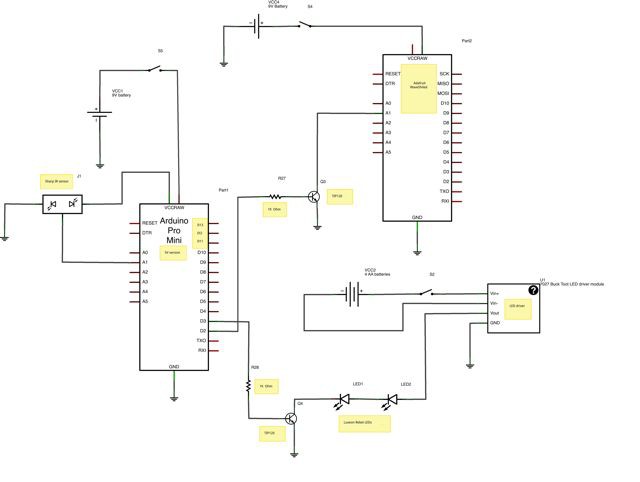
04/27/2014 at 02:25 • 0 commentsHere's the schematic and code for the boots- it's pretty simple. The Sharp IR sensor inputs a value into the Arduino which triggers the Luxeon boot lights and the WaveShield to play an audio file.
![]()
A larger version can be seen here.
Here's the code-
// these constants won't change:
int triggerSensor = 1; // the sensor is connected to analog pin 1
int threshold = 750; // threshold value to decide when the sensor input triggers
int ledPin = 3; // control pin for LED
int soundPin = 2; // control pin for sound board
// these variables will change:
int sensorReading = 0; // variable to store the value read from the sensor pin
void setup() {
Serial.begin(9600); // use the serial port
pinMode(ledPin, OUTPUT); // sets the LED pin as an output
pinMode(soundPin, OUTPUT); // sets the sound pin as output
digitalWrite(ledPin, LOW); // turn off LED
digitalWrite(soundPin, LOW); // turn the sound off
}
void loop() {
// read the sensor and store it in the variable sensorReading:
int val = analogRead(triggerSensor);
// if the sensor reading is greater than the threshold:
if (val >= threshold) {
Serial.println(val);
digitalWrite(soundPin, HIGH); // turn the sound on
delay(10); // wait ten milliseconds
digitalWrite(soundPin, LOW); // turn the sound off
digitalWrite(ledPin, HIGH); // turn the LED on
delay(2400); // wait two seconds
digitalWrite(ledPin, LOW); // turn the LED off
}
}
-
Build log 11- right side schematic and code
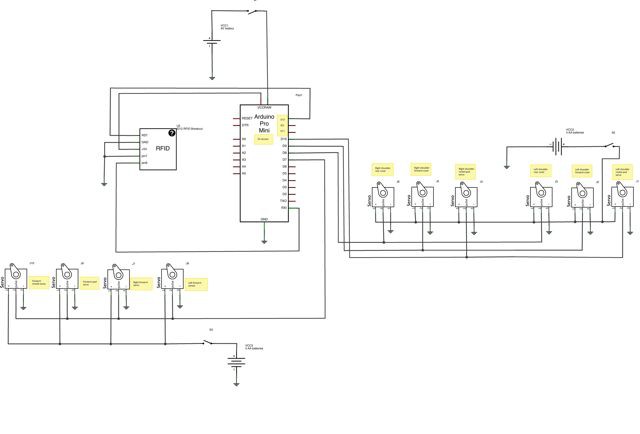
04/26/2014 at 23:49 • 0 commentsHere's the schematic and code for the right side. It's pretty similar to the left side, minus the XBee radio. The servos for the forearm rocket all receive the same signal- one of the servos that opens the side cover will need to be reversed rotation. Two of the servos that open the forward and rearward shoulder rocket covers will also need to have their rotation reversed as they receive the same signal as the servos on the opposite shoulder.
![]()
A larger image can be seen here.
Here's the code for the right side-
#include "Servo.h" // include the servo library
Servo forearmServo; // servos to move forearm missile
Servo rearcoverServo; // servo to move rear shoulder rocket pod cover
Servo forwardcoverServo; // servo to move forward shoulder rocket pod cover
Servo podServo; // servo to move shoulder rocket pod
int RFIDResetPin = 13;
int servoPin1 = 7; // control pin for forearm missile servos
int servoPin2 = 8; // control pin for rear shoulder rocket pod cover servo
int servoPin3 = 9; // control pin for forward rocket pod cover servo
int servoPin4 = 10; // control pin for shoulder rocket pod servo
//Register your RFID tags here
char tag1[13] = "440085E77452";
char tag2[13] = "440085FC330E";
char tag3[13] = "440085F97840";
char tag4[13] = "4400863914EF";
void setup(){
Serial.begin(9600);
forearmServo.attach(servoPin1); // attaches the servo on pin 7 to the servo object
rearcoverServo.attach(servoPin2); // attaches the servo on pin 8 to the servo object
forwardcoverServo.attach(servoPin3); // attaches the servo on pin 9 to the servo object
podServo.attach(servoPin4); // attches the servo on pin 10 to the servo object
forearmServo.write(45); // rotate the forearm servos to 45 degrees
rearcoverServo.write(45); // rotate the rear cover servo to 45 degrees
forwardcoverServo.write(45); // rotate the forward cover servo to 45 degrees
podServo.write(45); // rotate the left flap servo to 45 degrees
pinMode(RFIDResetPin, OUTPUT);
digitalWrite(RFIDResetPin, HIGH);
}
void loop(){
char tagString[13];
int index = 0;
boolean reading = false;
while(Serial.available()){
int readByte = Serial.read(); // read next available byte
if(readByte == 2) reading = true; // begining of tag
if(readByte == 3) reading = false; // end of tag
if(reading && readByte != 2 && readByte != 10 && readByte != 13){
//store the tag
tagString[index] = readByte;
index ++;
}
}
checkTag(tagString); // Check if it is a match
clearTag(tagString); // Clear the char of all value
resetReader(); // reset the RFID reader
}
void checkTag(char tag[]){
///////////////////////////////////
//Check the read tag against known tags
///////////////////////////////////
if(strlen(tag) == 0) return; // empty, no need to continue
if(compareTag(tag, tag3)){ // if matched tag3, do this
forearmServo.write(135);
delay(2500);
forearmServo.write(45);
}else if(compareTag(tag, tag4)){ // if matched tag4, do this
rearcoverServo.write(70); // rotate the pod servo to 90 degrees
delay(500); // wait half a second
forwardcoverServo.write(100); // rotate the forward cover servo to 110 degrees
delay(500);
podServo.write(80); // rotate the pod servo to 80 degrees
delay(4000);
podServo.write(45); // rotate the pod servo to 45 degrees
delay(500);
forwardcoverServo.write(45); // rotate the forward coverservo to 90 degrees
delay(500);
rearcoverServo.write(45); // rotate the pod servo to 135 degrees
}else{
Serial.println(tag); //read out any unknown tag
}
}
void lightLED(int pin){
///////////////////////////////////
//Turn on LED on pin "pin" for 250ms
///////////////////////////////////
Serial.println(pin);
digitalWrite(pin, HIGH);
delay(250);
digitalWrite(pin, LOW);
}
void resetReader(){
///////////////////////////////////
//Reset the RFID reader to read again.
///////////////////////////////////
digitalWrite(RFIDResetPin, LOW);
digitalWrite(RFIDResetPin, HIGH);
delay(150);
}
void clearTag(char one[]){
///////////////////////////////////
//clear the char array by filling with null - ASCII 0
//Will think same tag has been read otherwise
///////////////////////////////////
for(int i = 0; i < strlen(one); i++){
one[i] = 0;
}
}
boolean compareTag(char one[], char two[]){
///////////////////////////////////
//compare two value to see if same,
//strcmp not working 100% so we do this
///////////////////////////////////
if(strlen(one) == 0) return false; //empty
for(int i = 0; i < 12; i++){
if(one[i] != two[i]) return false;
}
return true; //no mismatches
} -
Build log 10- wireless helmet schematic and code
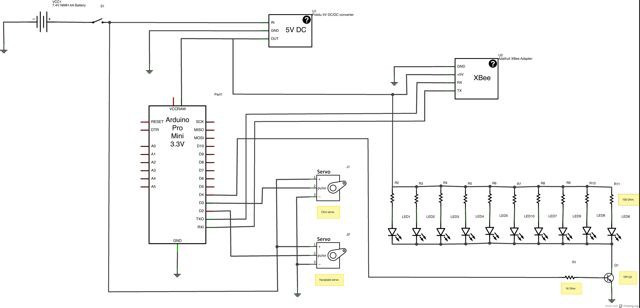
04/26/2014 at 06:48 • 0 commentsSince there's very little room in the helmet the wireless system was powered by a single 7.4V NiMH battery pack. The digital servos used in the helmet are designed to be operated on 7.4V so a DC/DC converter is used to provide power for the Arduino, XBee and LEDs.
![]()
A larger image is available here.
Here's the code for the helmet-
#include "Servo.h" // include the servo library
Servo faceplateServo;
Servo chinServo;
int ledPin1 = 4; // control pin for LED eyes
int servoPin1 = 2; // control pin for face plate servo
int servoPin2 = 3; // control pin for chin
void setup() {
faceplateServo.attach(servoPin1); // attaches the servo on pin 2 to the servo object
chinServo.attach(servoPin2); // attaches the servo on pin 3 to the servo object
faceplateServo.write(30); // rotate face plate servo to 30 degrees
chinServo.write(95); // rotate chin servo to 95 degrees
pinMode(ledPin1, OUTPUT); // sets the LED pin as output
digitalWrite(ledPin1, HIGH); // turn on LED eyes
Serial.begin(9600);
}
void loop() {
// look for a capital A over the serial port and turn off LED
if (Serial.available() > 0) {
if (Serial.read() == 'A') {
digitalWrite(ledPin1, LOW); // turn off LED eyes
delay(500); // wait half a second
faceplateServo.write(95); // rotate the face plate servo to 95 degrees
chinServo.write(20); // rotate the chin servo to 20 degrees
delay(4000); // wait 4 seconds
chinServo.write(95); // rotate the chin servo to 95 degrees
faceplateServo.write(30); // rotate the face plate servo to 30 degrees
digitalWrite(ledPin1, HIGH); // turn on LED eyes
}
}
}
-
Build log 9- Left side schematic and code
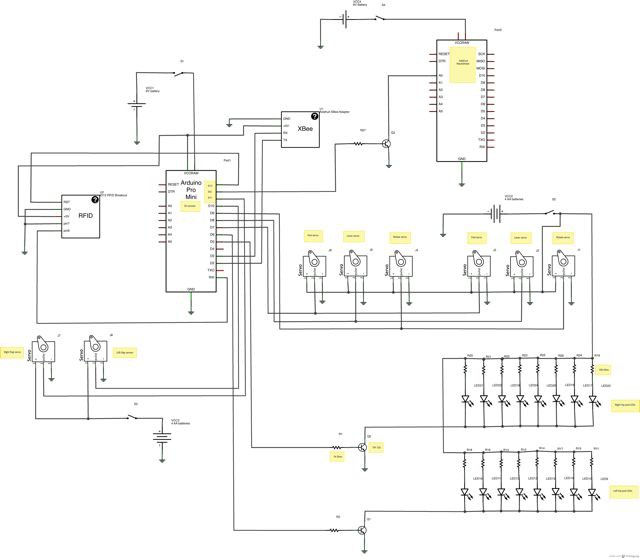
04/26/2014 at 06:39 • 0 commentsHere's the schematic for the left side control system. There are a few notes on the diagram but it's pretty straightforward. When parts were purchased for the suit the ID12 tag reader was only available in a 5V version, which was powered by the Arduino. Since the servos are powered by a 6V battery pack it was easiest to just use a 9V battery for the Arduinos and 6V packs for the servos because you need to isolate the power supply for the Arduino due to the electrical noise generated by the servos.
Now that the ID12 is available in a low voltage version it would be simpler to power everything from a 6V battery pack and use a 3.3V Arduino ProMini and use a 3.3V DC/DC converter to supply isolated power the Arduino.
![]()
A larger image is available here.
Here's the code for the left side-
#include <NewSoftSerial.h>
#include "Servo.h" // include the servo library
Servo podServo; // servo to move hip pods
Servo leverServo; // servo to move hip pod levers
Servo rotateServo; // servo to rotate hip pods
Servo leftflapServo; // servo to move left back flap
Servo rightflapServo; // servo to move right back flap
NewSoftSerial mySerial = NewSoftSerial(2, 3);
int RFIDResetPin = 13;
int ledPin1 = 6; // control pin for left hip pod LEDs
int ledPin2 = 5; // control pin for right hip pod LEDs
int servoPin1 = 10; // control pin for left flap servo
int servoPin2 = 11; // control pin for right flap servo
int servoPin3 = 9; // control pin for pod servo
int servoPin4 = 8; // control pin for lever servo
int servoPin5 = 7; // control pin for rotate servo
int soundPin = 12; // control pin for flare sound
//Register your RFID tags here
char tag1[13] = "440085E77452";
char tag2[13] = "440085FC330E";
char tag3[13] = "440085F97840";
char tag4[13] = "4400863914EF";
void setup(){
Serial.begin(9600);
mySerial.begin(9600);
podServo.attach(servoPin3); // attaches the servo on pin 9 to the servo object
leverServo.attach(servoPin4); // attaches the servo on pin 8 to the servo object
rotateServo.attach(servoPin5); // attaches the servo on pin 7 to the servo object
leftflapServo.attach(servoPin1); // attaches the servo on pin 10 to the servo object
rightflapServo.attach(servoPin2); // attaches the servo on pin 11 to the servo object
podServo.write(155); // rotate the pod servo to 135 degrees
leverServo.write(145); // rotate the lever servo to 135 degrees
rotateServo.write(165); // rotate the pod rotation servo to 170 degrees
leftflapServo.write(170); // rotate the left flap servo to 170 degrees
rightflapServo.write(10); // rotate the right flap servo to 10 degrees
pinMode(ledPin1, OUTPUT); // sets the LED pin as an output
pinMode(ledPin2, OUTPUT); // sets the LED pin as an output
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
pinMode(soundPin, OUTPUT); // sets the sound pin as output
digitalWrite(soundPin, LOW); // turn off sound pin
pinMode(RFIDResetPin, OUTPUT);
digitalWrite(RFIDResetPin, HIGH);
}
void loop(){
char tagString[13];
int index = 0;
boolean reading = false;
while(Serial.available()){
int readByte = Serial.read(); //read next available byte
if(readByte == 2) reading = true; //begining of tag
if(readByte == 3) reading = false; //end of tag
if(reading && readByte != 2 && readByte != 10 && readByte != 13){
//store the tag
tagString[index] = readByte;
index ++;
}
}
checkTag(tagString); //check if it is a match
clearTag(tagString); //clear the char of all value
resetReader(); //reset the RFID reader
}
void checkTag(char tag[]){
///////////////////////////////////
//Check the read tag against known tags
///////////////////////////////////
if(strlen(tag) == 0) return; //empty, no need to contunue
if(compareTag(tag, tag1)){ // if matched tag1, do this
mySerial.print('A');
}else if(compareTag(tag, tag2)){ // if matched tag2, do this
podServo.write(90); // rotate the pod servo to 90 degrees
delay(500); // wait half a second
leverServo.write(95); // rotate the lever servo to 90 degrees
delay(1000);
rotateServo.write(5); // rotate the pod rotation servo to 10 degrees
delay(1500);
leverServo.write(145);
delay(500);
digitalWrite(soundPin, HIGH); // turn sound on
delay(10); // wait ten milliseconds
digitalWrite(soundPin, LOW); // turn sound off
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50); // wait 50 milliseconds
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn off LEDs
digitalWrite(ledPin2, HIGH); // turn off LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn off LEDs
digitalWrite(ledPin2, HIGH); // turn off LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn off LEDs
digitalWrite(ledPin2, HIGH); // turn off LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn off LEDs
digitalWrite(ledPin2, HIGH); // turn off LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
delay(50);
digitalWrite(ledPin1, HIGH); // turn on LEDs
digitalWrite(ledPin2, HIGH); // turn on LEDs
delay(50);
digitalWrite(ledPin1, LOW); // turn off LEDs
digitalWrite(ledPin2, LOW); // turn off LEDs
leverServo.write(95); // rotate the lever servo to 90 degrees
delay(1500);
rotateServo.write(165); // rotate the pod servo to 135 degrees
delay(1000);
leverServo.write(145);
delay(500);
podServo.write(155); // rotate the pod servo to 135 degrees
delay(2000);
leftflapServo.write(125); // rotate the left flap servo to 125 degrees- full up
rightflapServo.write(55); // rotate the right flap servo to 55 degrees- full up
delay(500);
leftflapServo.write(170); // rotate the left flap servo to 170 degrees- full down
rightflapServo.write(10); // rotate the right flap servo to 10 degrees- full down
delay(500);
leftflapServo.write(125); // left flap full up
delay(500);
leftflapServo.write(170); // left flap full down
delay(500);
rightflapServo.write(55); // right flap full up
delay(500);
rightflapServo.write(10); // right flap full down
}else{
Serial.println(tag); //read out any unknown tag
}
}
void lightLED(int pin){
///////////////////////////////////
//Turn on LED on pin "pin" for 250ms
///////////////////////////////////
Serial.println(pin);
digitalWrite(pin, HIGH);
delay(250);
digitalWrite(pin, LOW);
}
void resetReader(){
///////////////////////////////////
//Reset the RFID reader to read again.
///////////////////////////////////
digitalWrite(RFIDResetPin, LOW);
digitalWrite(RFIDResetPin, HIGH);
delay(150);
}
void clearTag(char one[]){
///////////////////////////////////
//clear the char array by filling with null - ASCII 0
//Will think same tag has been read otherwise
///////////////////////////////////
for(int i = 0; i < strlen(one); i++){
one[i] = 0;
}
}
boolean compareTag(char one[], char two[]){
///////////////////////////////////
//compare two value to see if same,
//strcmp not working 100% so we do this
///////////////////////////////////
if(strlen(one) == 0) return false; //empty
for(int i = 0; i < 12; i++){
if(one[i] != two[i]) return false;
}
return true; //no mismatches
} -
Build log 8- electronics
04/24/2014 at 18:58 • 0 commentsThe electronics for this suit aren't really that complex once it's broken down into separate systems. The reason I wanted to make the left side/right side and boots separate systems was so they could be run at the same time and if one system went down the rest of the suit would still operate.
The left side takes the RFID tag input from two fingers on the left hand and then the Arduino will operate either the helmet functions (via the XBee radio) or it will have the hip pods and back flaps run through a programmed sequence.
The right side takes the RFID tag input from two fingers on the right hand and then a second Arduino operates either the hip pods or shoulder rockets, depending on which tag is read. If the hip pods are selected then the WaveShield is also triggered to play a sound effect.
The IR sensor in the right boot sends a signal to another Arduino that operates the lights for the boots and triggers the WaveShield to play a sound effect.
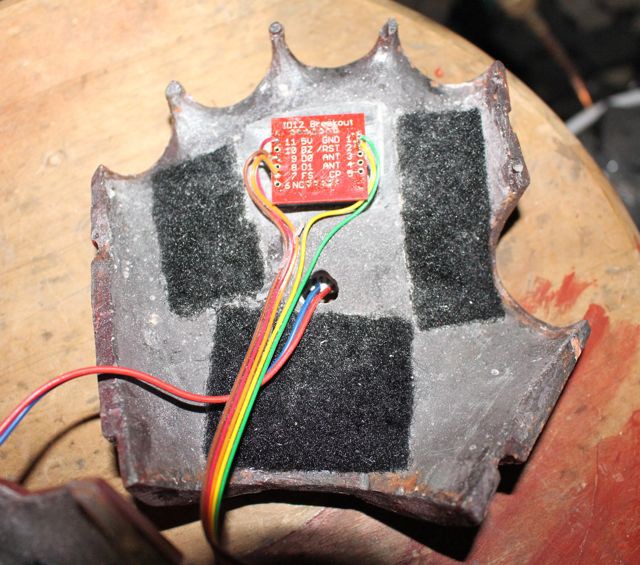
For testing purposes I glued RFID tags and a tag reader to a glove to get an idea as to how easy it would be to operate, since the tag reader can only read one tag at a time. Reading two tags at the same time gives zero output. I was worried that since the fingers were in close proximity to one another this could be a problem, but it turns out it worked just fine.
![]()
The tag reader was then mounted to the inside of the fiberglass suit glove shell using adhesive foam tape. The back side of the board was then taped over to protect it and the lead wires. The glove clam shells fit over a batting glove so the wearer's hand never comes in contact with the board.
![]()
The gloves have extension leads that connect to the gauntlets, which have Ethernet jacks for connecting to the Ethernet cables that run through the arms. The left gauntlet is pretty much empty while the right gauntlet has AA battery holders as well as a small connector board for the servo wires.
![]()
![]()
The servo wires are run through a hole in the gauntlet base plate.
![]()
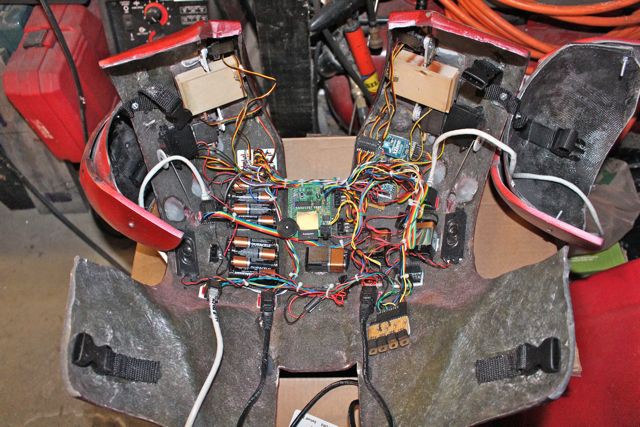
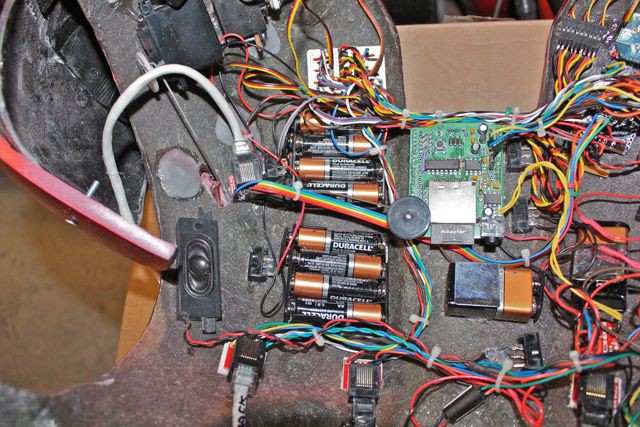
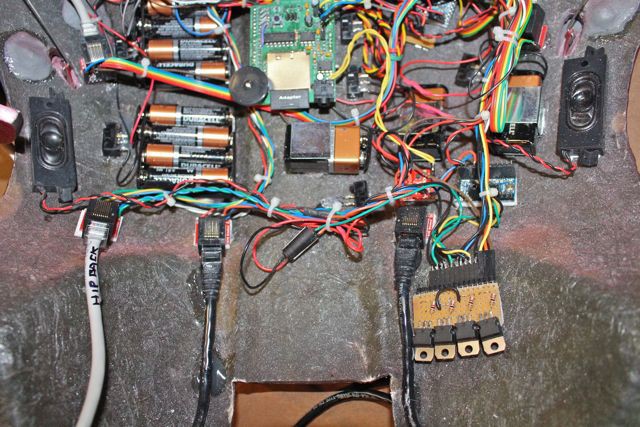
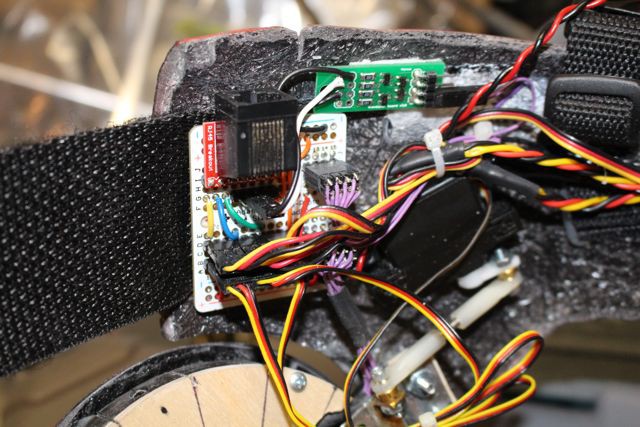
The three Arduino ProMinis are mounted in the back of the upper torso section along with batteries and power switches for each system. The WaveShield sits atop the Arduino Pro in the center. The transmitting XBee radio for the helmet is visible in the upper corner. There are also several Ethernet jacks visible- two for the arms, two for the legs and one for the Ethernet cable that runs to the hip section. Also visible is a board that has a few transistors on it- these take the signals from the Arduinos and turn on the boot lights and trigger the sound effects via the Wave Shield. THe WaveShield output is boosted by a small amplifier board. There is a small breadboard PCB in the upper corner that has connectors for the shoulder rocket servos and back flap servos. The two speakers were salvaged from an old monitor.
![]()
![]()
![]()
![]()
And that is a boatload of wiring! The boards are secured using foam tape as it holds them securely but they can still be removed and if wires get pulled nothing will get damaged. The Ethernet cables were also secured using hot glue a bit away from the connectors in order to provide some strain relief.
If I was to do it again I would probably create a single board down the center and have the Arduinos socketed along with a socketed transistor board using SMD transistors. I would also have the servo connectors on the center board. That would go a log way toward cleaning up the wiring.
The hip pod section uses a small breadboard PCB with an Ethernet connector to route the signals for the servos and LEDs in the pods. There is a small transistor board that is used to turn on the pod LEDs. The wires fro the LEDs were run through the back of the pods near the hinge and heatshrink tubing was used protect the wires from potential damage caused by hinge movement.
![]()
![]()
![]()
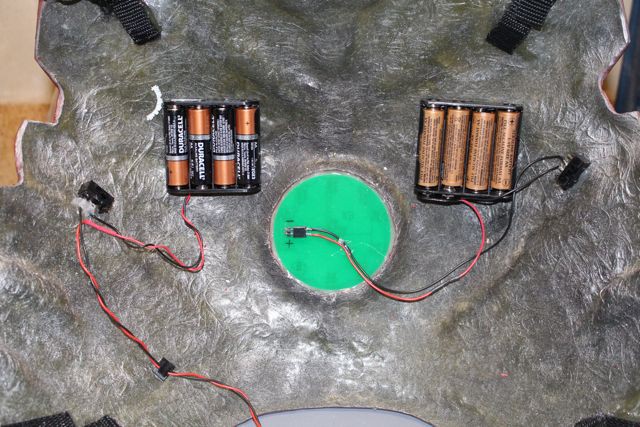
Finally the AA batteries that provide power to the hip pod servos were mounted to the inside of the chest section near the chest light along with a switch. A power lead with a JST connector was run to the hip pod section.
![]()
Much to my surprise, everything actually worked the first time it powered up (even though I had breadboarded the circuits for testing.) The only thing I had to do was make adjustments to timing and servo movements in the code.
-
Build log 7- boots
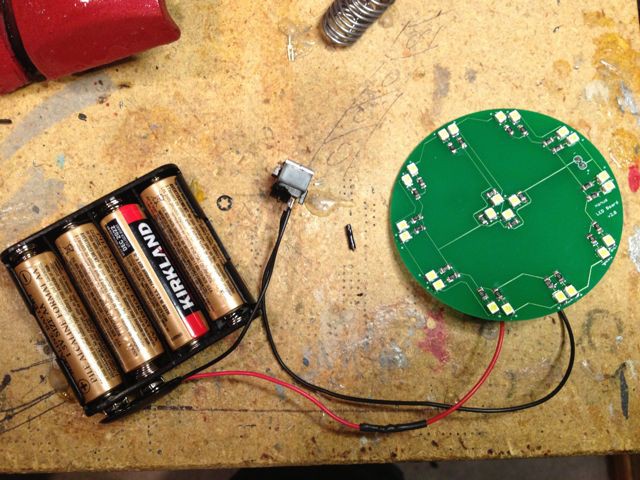
04/23/2014 at 04:52 • 0 commentsWe knew that we wanted to boots to light up and make a robotic clanking sound while walking. I figured the easiest way to trigger this effect was to use a distance sensor on the underside of the boot- in this case the Sharp GP2D120XJ00F IR sensor. The sensor reads the distance from the boot to the ground and then a threshold value is set in the code so when the value exceeds the threshold the sensor tells the Arduino to turn on the light and activate the sound. Simple!
A cavity was carved out of the bottom of the boot with a Dremel tool and the sensor was mounted in place. A hole was drilled through for the sensor wires as well as the wires for the high power Luxeon LED. The wires for these were bundled together and a connector was soldered on so they could be easily disconnected from the wires that ran down through the legs of the suit. Only one sensor is needed to trigger the Arduino so the sensor was mounted in the right boot since Greg begins walking with his right foot first.
![]()
-
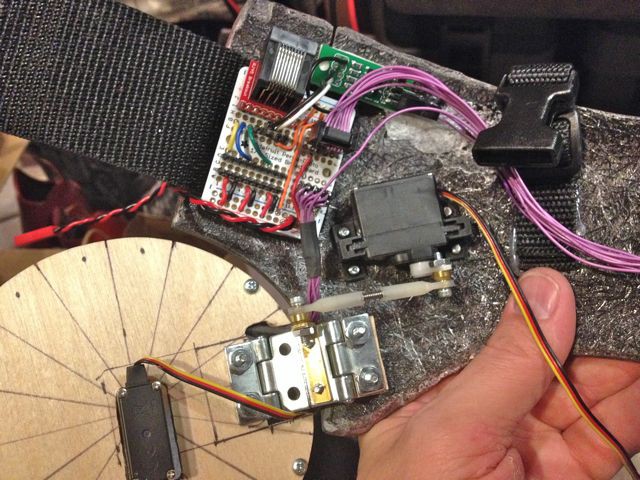
Build log 6- back flaps
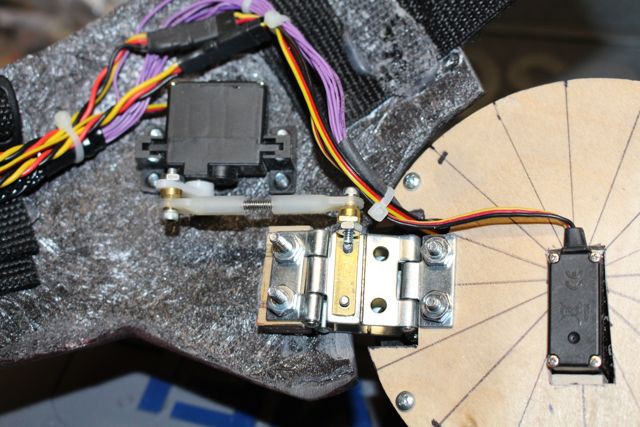
04/23/2014 at 04:35 • 1 commentThe back flaps were very straight forward to animate. The flaps were first held in place with tape in order to locate the hinges.
![]()
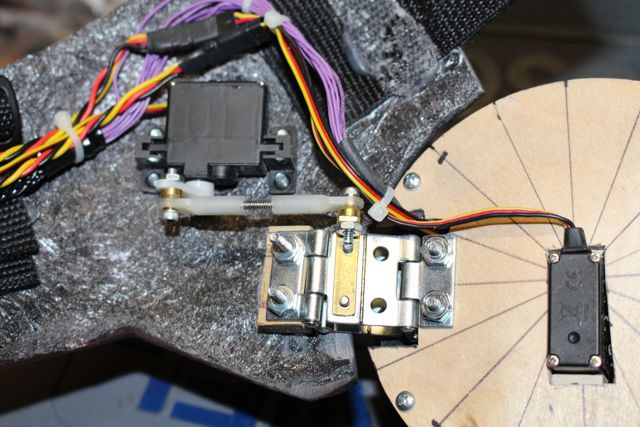
Hinges were constructed using brass rod and tube and they were epoxied to the back of the flaps. The hinges were then mounted to the back of the upper torso by drilling holes and using epoxy putty to bond them in place.
![]()
![]()
![]()
Control horns were mounted to the flaps and slots were cut in the upper back torso section so the control horns and connecting rods could fit through. The servos to move the back flaps were mounted to the inside of the upper back torso using high strength Velcro.
![]()
Finished!
![]()
-
Build log 5- lights!
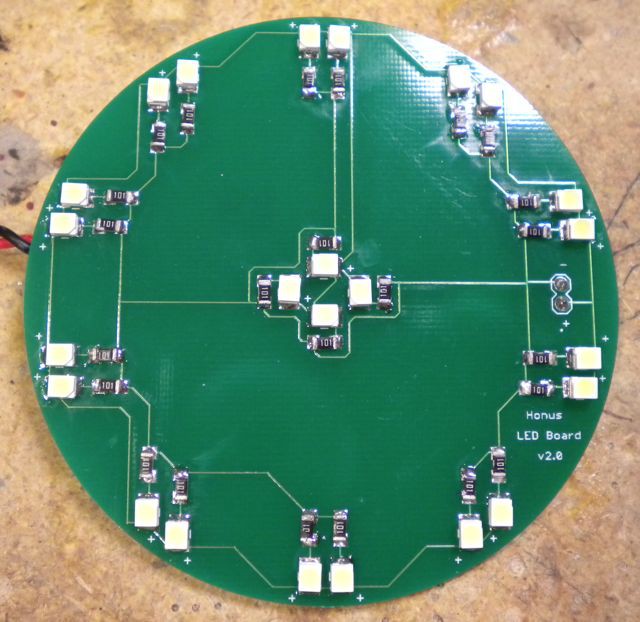
04/23/2014 at 03:11 • 0 commentsWhat Iron Man suit would be complete without lights? For the chest light I created a simple PCB in EAGLE and soldered on the surface mount resistors and LEDs. The finished PCB was wired up and mounted behind the translucent chest piece.
![]()
![]()
![]()
![]()
![]()
With the hands we lucked out and didn't need to build the lighting system from scratch as Greg already had a repulsor light and sound system that was donated by a friend.
![]()
![]()
-
Build log 4- hip pods
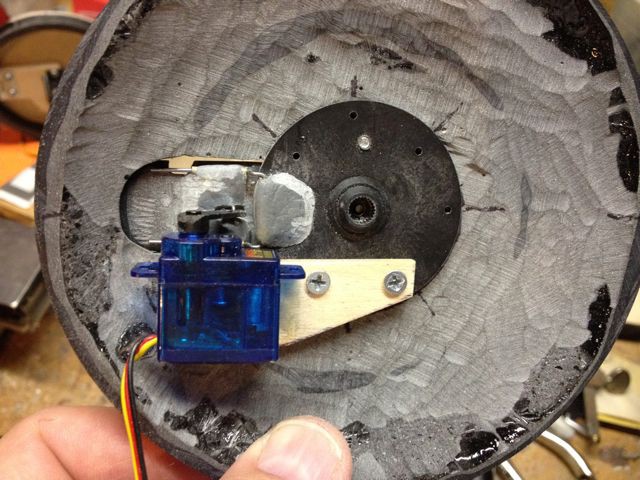
04/22/2014 at 18:55 • 0 commentsThe hip pods were something I kind of threw in- Greg wasn't expecting it. Heck, I wasn't expecting it! Greg now knows me well enough to know that I tend to first say it can't be done or isn't probable and then fifteen minutes later I figure it out- that's just my M.O. The hip pods are a perfect example of this. I first looked at the suit and said "no way." But of course it bugged me because it would be so cool to have them move... So first I figured out how to make them pop out of the hip section. Then I thought it would be great if they could rotate. Then I thought, well heck- might as well make the lever on the cover slide and have them light up!
To make the pods pop out I took two small hinges and welded them together to make a parallelogram linkage and then added a micro servo to move the linkage. The finished mechanism is very low profile. Getting the pods to fit right was tricky because the fiberglass hip section with was molded as one piece so everything had to be cut apart and reconstructed. The faceplate of the pod was cut away and hollowed out to make a shell and a housing was made from ABS pipe. A backing plate was cut from birch plywood.
![]()
![]()
![]()
Several ideas were tried for the pod rotation system but ultimately the faceplate was driven directly by a servo as that took up the least amount of space. The rotation servo is mounted to a piece of plywood that is bolted to the hinge assembly. LEDs were mounted in the ABS ring to simulate the flares.
![]()
A servo wheel is mounted to the rotation servo and it drives the pod faceplate. To make the lever on the faceplate slide open a sub-micro servo is mounted to a plywood plate that is attached to the servo wheel. The servo output arm has a small slot cut in it and it is attached to the sliding lever using with a small section of music wire that is epoxied in place. The lever slides on a small hinge made from music wire and brass tubing- the hinge is attached to the large servo wheel. As the servo lever moves the hinge rotates slightly outward and the lever slides open. This particular mechanism required a lot of trial end error fitting to get it to move smoothly with very little friction.
![]()
![]()
![]()
Since the suit hip section had been cut away in order to use the pods we had to reconstruct the flanges on the back hip section. Sintra sheet was cut and formed to shape and was epoxied in place and then the seams were filled in with Apoxie Sculpt. In the end the hip pods worked really well and I'm glad we went to the trouble of adding them!
![]()
-
Build log 3- shoulder rocket pods
04/22/2014 at 05:49 • 0 commentsWe really wanted shoulder rocket pods- in a big bad way. We just thought it would be so cool to see them open up and unfold like in the movie. The trouble was there was no way they could ever fit in there and perform in a similar fashion- the suit simply didn't have the necessary internal volume. There is about one inch of usable depth in the shoulder area. Those darn visual effects again...
Once I began taking measurements with Greg in the suit I wasn't so sure it could be done. I think I probably sketched a couple hundred designs trying to figure out a way to have the pod raise up and fold over. This was a key feature I really, really wanted. I didn't want to have a pod that opened like one of those flip up car headlamps. I knew I couldn't have it perform like in the film with the entire shoulder section moving but I felt I could get something that looked really cool.
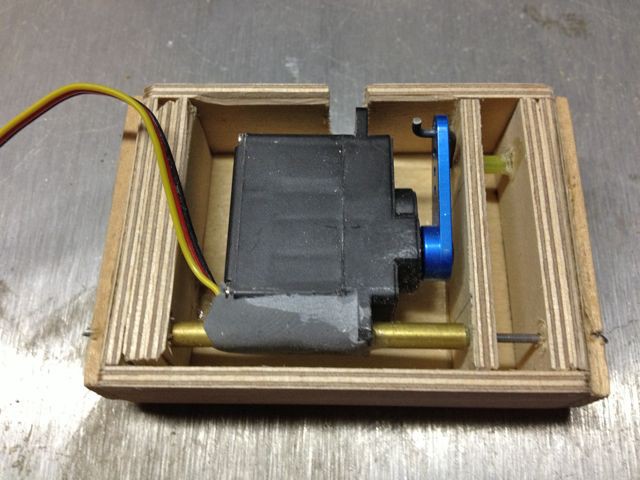
I finally settled on having a section of the shoulder split into two panels- one rotating forward and one rotating backward. This would give a decent sized opening for a proper size rocket pod. The big trick was making the pod an open box so the servo could hide inside it- without that there was no way it would ever fit in the shoulder cavity.
The pod is constructed of birch plywood and pivots are fabricated from brass tube and music wire. As the servo arm rotates the rear of the rocket pod is pushed away from the servo. The pod servo is mounted to an Aluminum plate that is attached to the forward shoulder panel servo. The rear panel servo has a similar Aluminum plate attached to it. The plates have threaded holes in them for attaching the shoulder panels to them with small brass angle brackets. The holes in the brass angle brackets are slightly slotted to allow for a small range of height adjustment of the shoulder panel.
![]()
![]()
There was an enormous amount of trial and error fitting as once the shoulder was cut out of the fiberglass suit there would be no turning back- we had to be right on the money the first time. The panel openings were taped off and cut out with a Dremel tool and then the servos were mounted inside the shoulder area using plywood mounts epoxied into place. Getting the panels to fit just right was a real challenge!
![]()
![]()
![]()
Animatronic Iron Man MKIII suit
RFID tags in the gloves control shoulder rockets pods, hip pods, forearm missile, back flaps and wireless helmet.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}