 fullyanalog-programmer
fullyanalog-programmerMPU-6050 is sort of a black box w/ its motion processing unit being closed-source. However, my challenge was overcoming its constant lock up from the boot-up. Eventually the issue was solved w/ 10k pull-up resistors connected to I2C data and clock lines. No more lock-ups! This is initial version w/ planar stabilization on roll and pitch axis.
I intend to add some predictive logic for motion commands in the future.



 Hari Wiguna
Hari Wiguna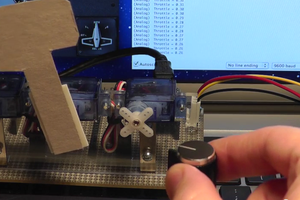
 Paul Stoffregen
Paul Stoffregen
 Forrest Bao
Forrest Bao
 Marcin Saj
Marcin Saj
I love your servo mounting strategy!