 JLAM
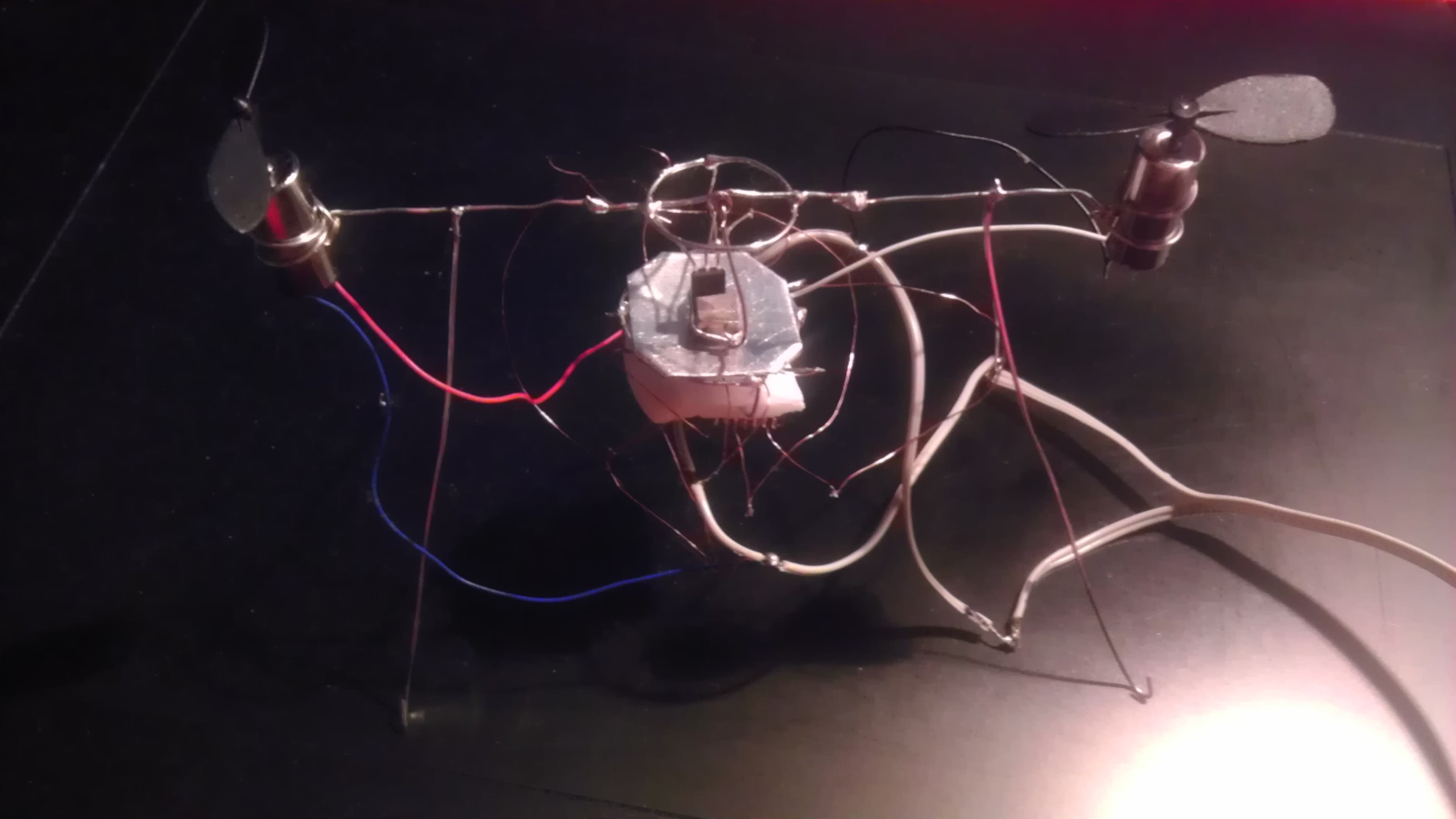
JLAMThe basic idea is to perform a PID (or maybe just a PI or just an I) control loop in opamps. Then use the analog values to control a PWM generator to drive the motors. The final form is aimed to be 50x50mm or less. Powered by the original mini Li-Po pack from the helicopters, it should be entertaining for a few mins.
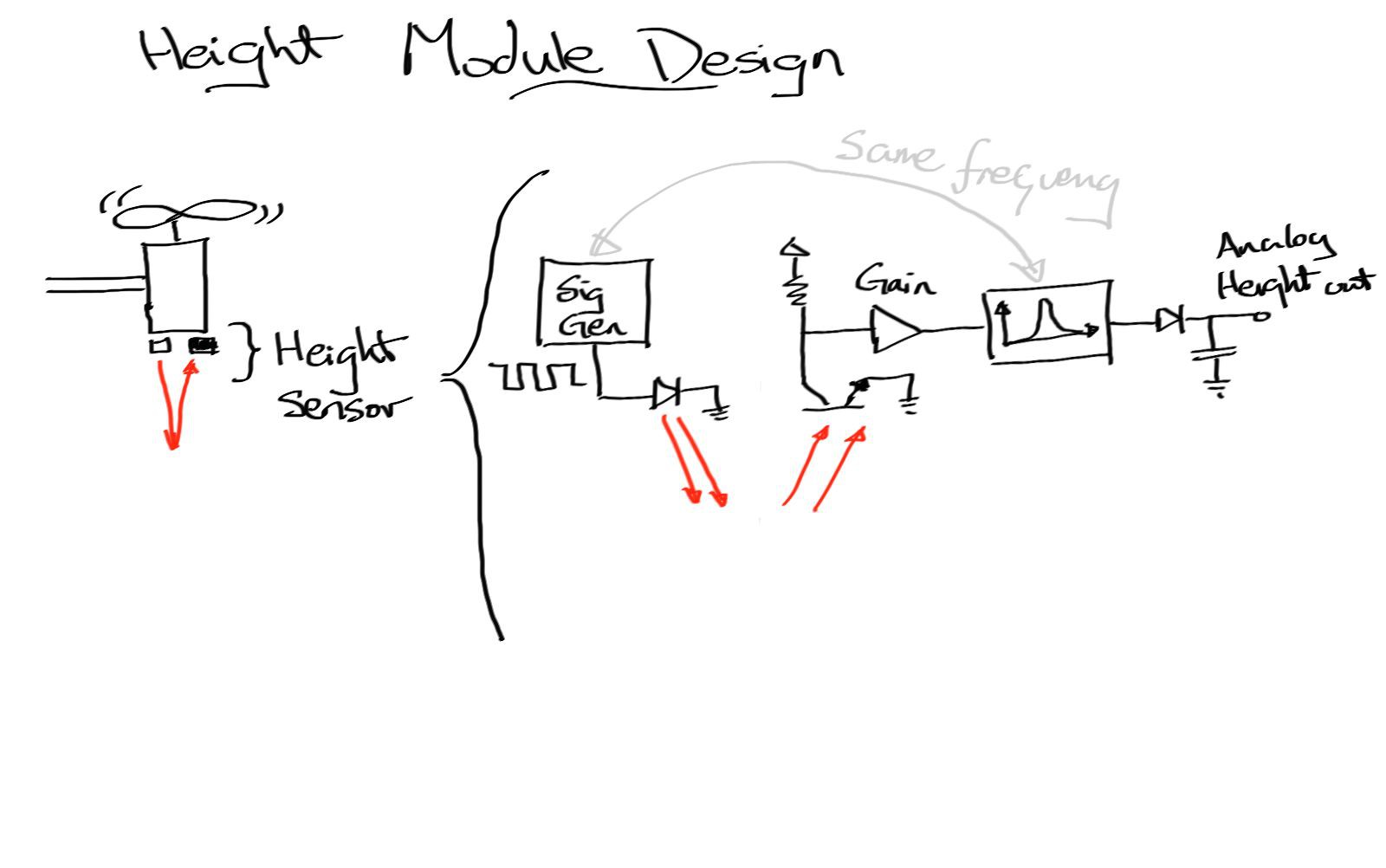
As this is purely an exercise in analogue electronics, it makes sense to focus on the control loop. After much thought, it seems easiest to make independent drive modules that will maintain a certain parameter such as altitude or velocity. I hope to add a purely analogue FM controller if the project persists.
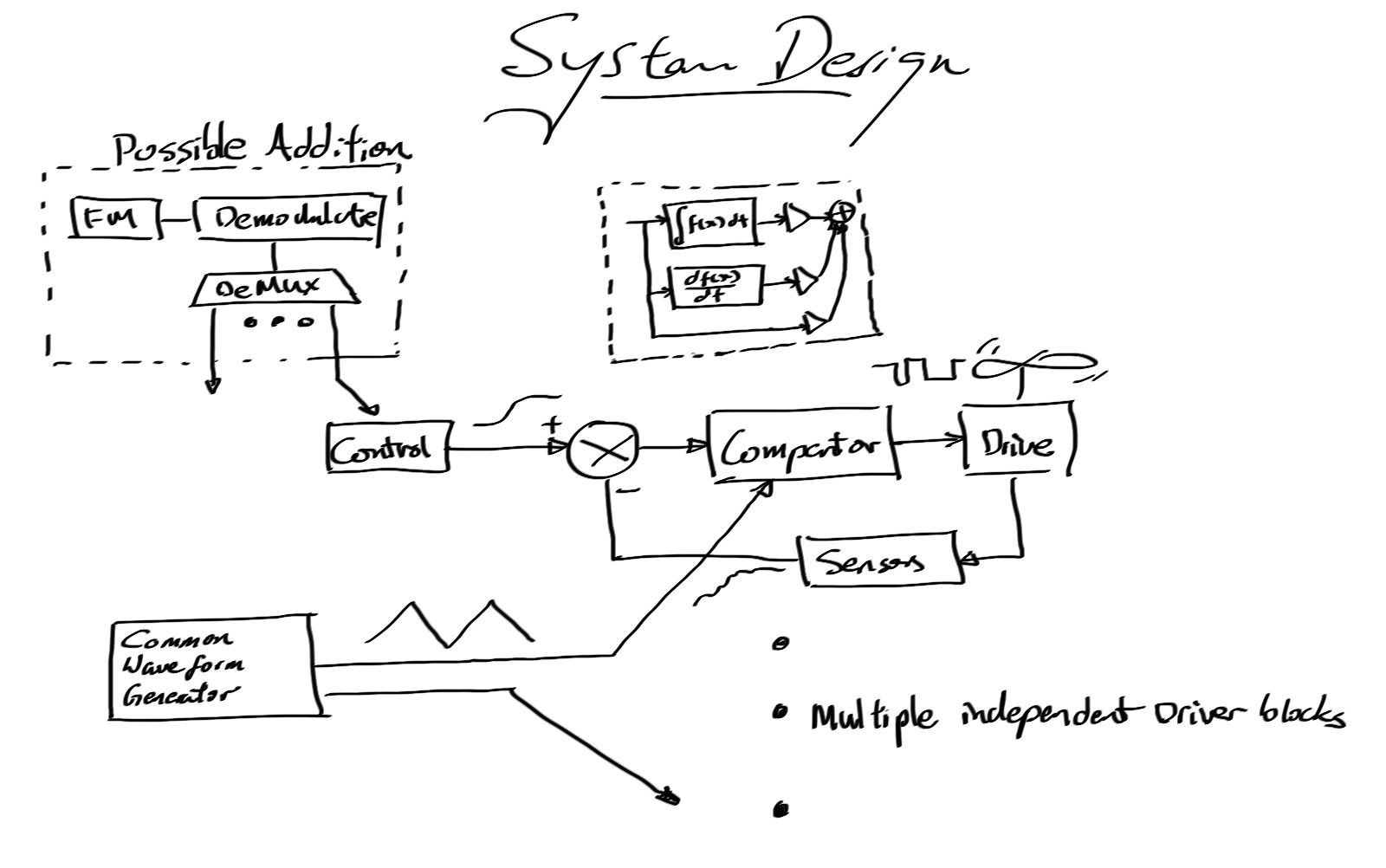
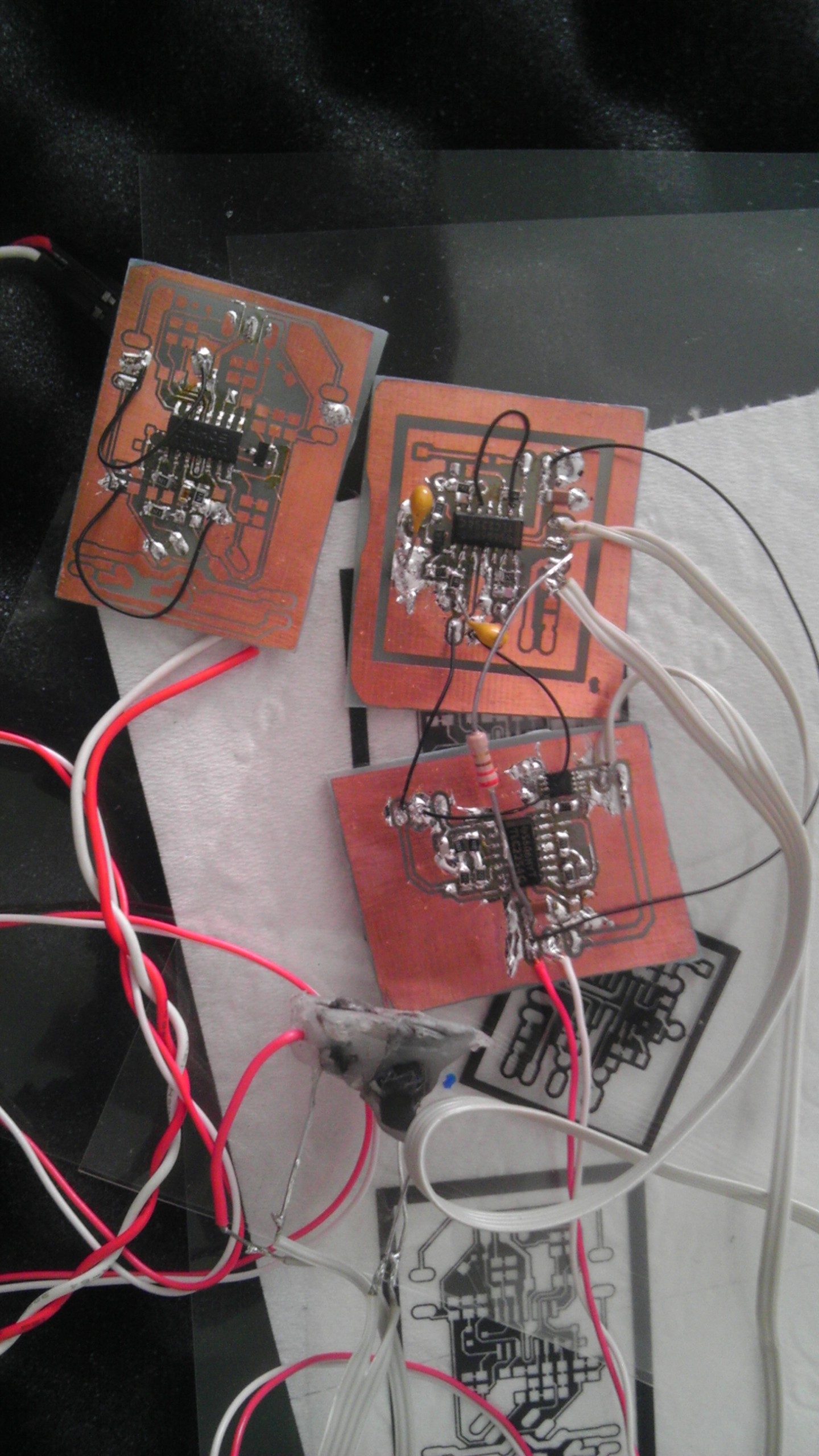
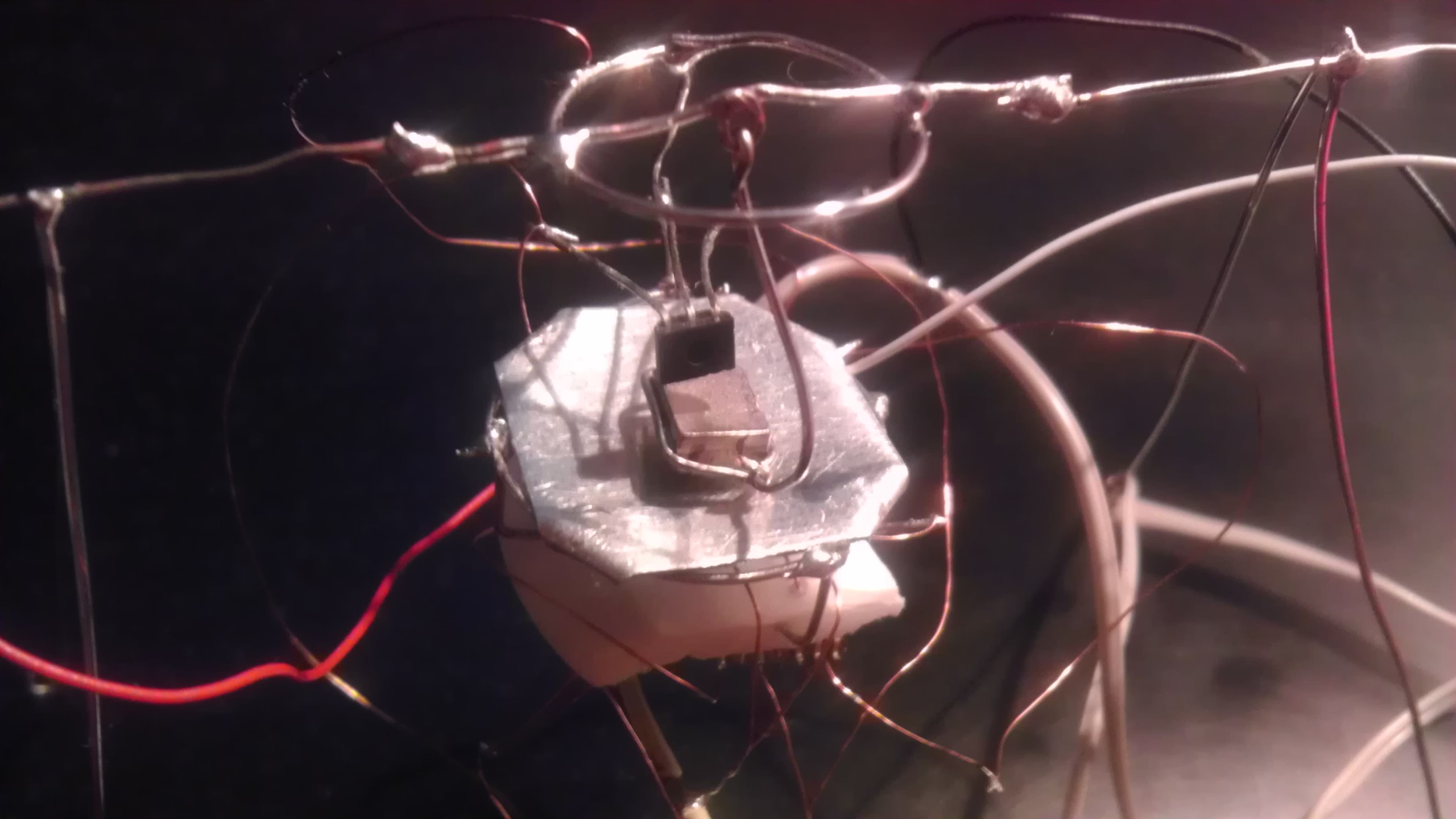

 So the idea behind the motor drive stage is a triangle wave generator with a op-amp acting as a comparator. The voltage reference signal will determine the PWM duty cycle. All this fits onto a quad opamp package. And to save weight I just soldered it dead bug style with SMDs. I also had dual N&P channel FET packages and had to drive one motor with a N and other with a P channel. It all worked out.
So the idea behind the motor drive stage is a triangle wave generator with a op-amp acting as a comparator. The voltage reference signal will determine the PWM duty cycle. All this fits onto a quad opamp package. And to save weight I just soldered it dead bug style with SMDs. I also had dual N&P channel FET packages and had to drive one motor with a N and other with a P channel. It all worked out.





 ridonkulus
ridonkulus
 Paul Gould
Paul Gould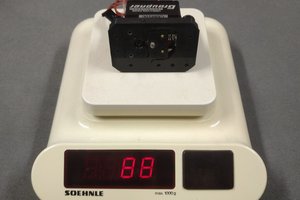
 Matthias Hasenfus
Matthias Hasenfus
Don't quit unsterstand what you are trying to achieve with the "pendulum" but just in case, I'll leave this here: https://www.dronependulumfallacy.com/