Dan Royer
Dan Royer-
Sorry, Mario. Your princess is in another castle.
04/04/2019 at 17:53 • 0 commentsThis project is now retired as I have moved (Since November 2018) to a 6 axis model. Please follow this link to find out more: https://hackaday.io/project/164755-sixi-2
-
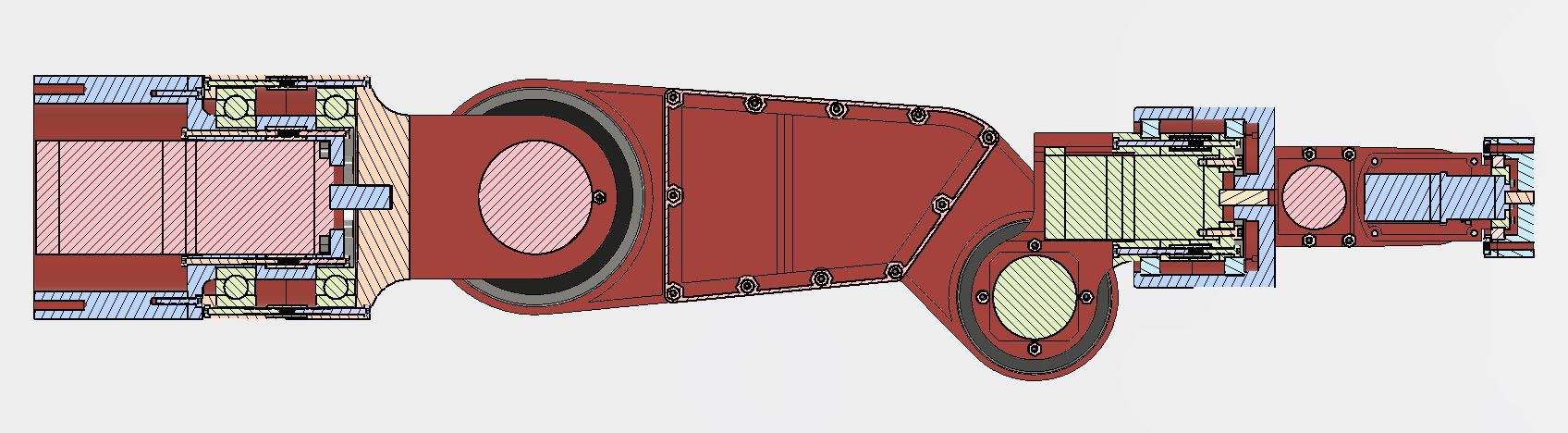
Updated Render of Sixi 2
03/09/2019 at 00:24 • 0 comments![]()
Thirsty for robots? Say no more! This is a render in Fusion360 of our up-to-date model of the Sixi 2 robot arm. All the Fusion360 files are available through my Patreon so you can get started making it today.
Also the Robot Overlord app has been updated to do IK and FK calculations on the arm, meaning it will be easy to train it for various applications. My first goal is to make it pour a beer. My second is to work on self assembly. If I can get these arms to assemble their sisters... it's the last time I'll build a robot by hand.
You can follow my weekly progress reports on my blog or through my youtube channel.
-
Machine Learning for path finding, part 1
07/20/2018 at 01:51 • 0 commentshttps://www.marginallyclever.com/2018/07/can-machine-learning-improve-robot-kinematics/
I'm trying to use Machine Learning for robot path finding. Read all about it at the link above.
-
Study number 5
10/26/2017 at 06:59 • 5 comments![]()
I was up until 4:30am last night working on the fifth attempt to design the arm. Previous post on HAD.io were of (at best) study 4. I reached a point in the design where I'd found enough mistakes that it was easier to restart and use the existing design files as a reference to do a better job. I believe that - after three days of work - I've got something that solves all my previous issues and has fewer prints.
![]()
With lessons from the previous attempts, this time I built things in large passes:
place all the things that can't be negotiated (bearings, motors, screws in motor faces)- build the bones to hold the parts together as rough blocks
- plan where to cut the bones for printing
- add the screw holes, screws, and nuts to each block
- cut the bones into pieces
- calculate bill of materials
- order missing mechanical parts
- adjust each piece for printer tolerance and print. <-- I am here
- the rest of the Gantt chart
Speaking of BOM, here are some stats:
- 218 fasteners
- 34 mechanical parts off the shelf, including the drivers and the controller
- 35 printed parts using ~1.8kg of filament at 20% infill will take 65h of continuous printing.
Cost for raw goods and DIY printed parts is matching my expectations. The long pole is the 8 larger bearings. I got them from VXB.com and they're about $250+shipping. Ugh!
So for day to day updates, follow me on Instagram.
Become one of my Patreon supporters today and you get early access to the Fusion360 files. Build this yourself! Contribute ideas! Automate all the things.
-
shoulder printed
10/22/2017 at 06:17 • 0 comments -
Bicep printed
10/16/2017 at 21:44 • 0 comments![]()
Bicep parts are all printed. I have to collect a number of missing fasteners and wait for bearings to be delivered. In the meantime I'm going to assemble the circuitry for the controller and run some tests on a rotation sensor idea that's staying under wraps for now.
-
6 axis model progress
10/14/2017 at 22:02 • 0 commentsHere are some pics from the 6 axis model I'm currently working on.
https://www.instagram.com/p/BaPQChtgkqp/?taken-by=imakerobots
https://www.instagram.com/p/BaK56pIg09m/?taken-by=imakerobots
https://www.instagram.com/p/BZuFjqrAWwr/?taken-by=imakerobots
As I print and assemble each part I check it against the model. More efficient than building an entire model in a vacuum and finding I made mistakes. Maybe it couldn't be done without an existing, purely-vacuum model as a reference. Hard to say from the other side!
The design files for this version are on Patreon. https://www.patreon.com/imakerobots
You can wait until it's for sale or chip in a little now, get the files early, and support development. Your call.
-
Hiatus
03/28/2017 at 17:59 • 0 commentsI'm always thinking about building the arm and life laughs at my plans.
I'm currently building several robots as commissions; running Marginally Clever.com; and spending a lot of coding time on Robot Overlord. I've got newly designed AS5045 sensors that work well, they now need to be integrated into an updated arm design. I may actually repurpose those sensors in another project first: A new Stewart Platform being built for a local science museum.
-
Rotation sensor AS5045 upgrades
12/28/2016 at 17:10 • 0 commentshttps://www.instagram.com/p/BOim_CBjiaU
The biggest problems with the last arm design all stemmed from poor sensor construction.
- the wires were exposed to users where they could catch, fall off, etc.
- the sensor and magnet have to be held in perfect alignment or the arm loses sensation and goes nuts.
To fix that I'm working on a single sensor unit that I can test independently and use as needed in my next arm.
-
When will there be more news?
09/22/2016 at 22:51 • 0 commentsI'm deep into preparing for a new product launch, and then finishing the Jigsolve. My winter project is to make a new arm and integrate it with Robot Overlord, which still needs a way to record/play back every robot it supports. I'm also putting together a team to build a new game based on my design doc, which should eat ~6 months and cost ~100k.
All of which is to say I'm really busy and I need all the help I can get. I'm looking for talent everywhere.
There is a growing number of open source robot arms, which is super. I only build one because I can't get one at an affordable price. So if you're making an arm, please let me add Robot Overlord support and together I hope we can achieve greater things.
5+ Axis Robot Arm
Building an open source robot arm for makers and small businesses