 JackRC
JackRC-
1Step 1
Build a robot with 1:16 RC tank platform and support the tablet with aluminum structure.
tank
-
2Step 2
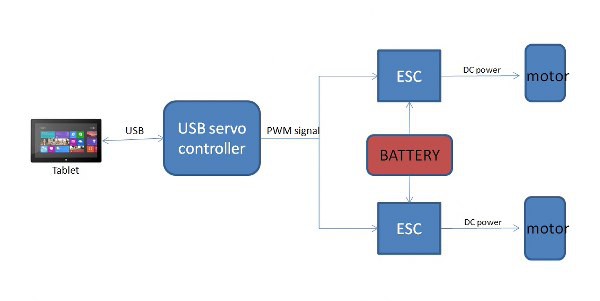
Plug-in the RC car servos and ESC (Electronic Speed Controller) to USB servo controller, write a C++ or C# program to control the USB servo controller and maneuver the vehicle.
![]()
-
3Step 3
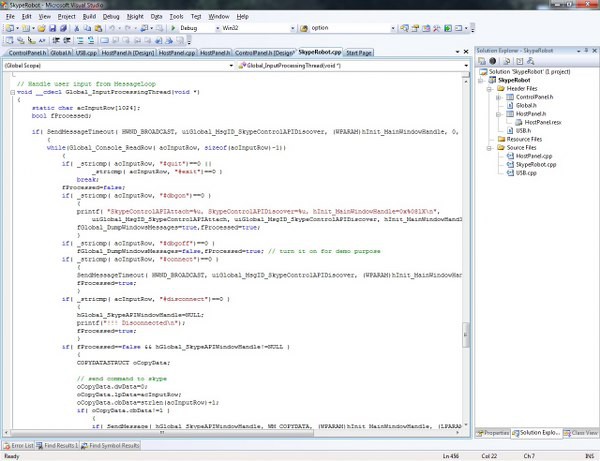
Integrate the previous USB program with Skype API. Skype API reference can be found here:
http://web.archive.org/web/20130607130426/http://dev.skype.com/desktop-api-reference#Windows
![]()
-
4Step 4
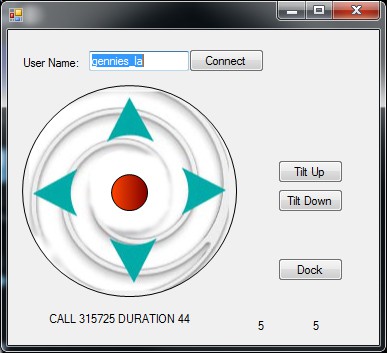
Create a C++ or C# user interface to send out the control signals with Skype "Application to application commands" (it's a type of message for Skype to communicate between machines)
![]()
-
5Step 5
Make a Skype call and maneuver the robot from other side of the world!
![]()

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no