Originally a product of Adept Technology, three decommissioned industrial assembly line robots combined into one. Closed Loop 400W AC Servos with 4096pt Absolute Encoders. 1394 IEEE (Firewire) based control system. 157Lb rated capacity at full speed. SINGLE PHASE 110VAC supply for the whole machine.
I have End Effectors that attach to the base robot for wood routing, 3D printing, 3D Laser scanning, Laser Cutting as well as the ability to automate basic hand tools with simple hardware mods.
Mechanically, The X and Y axis are identical, comprise of two supporting NSK linear ball bearing slides and a 20mm/Rev NSK ballscrew. The Z axis has a single NSK wide linear ball bearing slide and a 10mm/Rev NSK ballscrew, with brake. For the most part the entire machine is made of extruded aluminum with helicoiled threads. Total range of movement is currently 640mm x 640mm x 290mm.
With the current software configuration, 1200mm/s positioning is possible, but never seen due to limited travel distance. Individual servos are updated by the controller at 250hz, providing seamless high speed trajectory generation. The split X-Axis has backlash support, meaning the slaved (Left) axis is adjusted to maintain the Y-axis squareness to the Master X-axis (Right) as part of the main servo control loop.
Other modifications include my Tron-Esque styling; all individual axis have RGBW backlighting installed into the bearing guards. The entire electrical control system has been boiled down to a single ZipLoc Container. Bulkhead connectors allow the robot to be quickly and reliably connected, while maintaining easy of transportation.

 Adrian Prinz
Adrian Prinz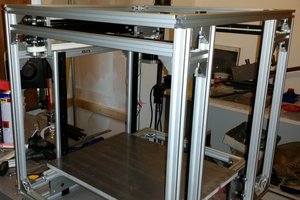
 mbasecnc
mbasecnc
 GOAT INDUSTRIES
GOAT INDUSTRIES
 sporkius
sporkius
Howdy,
After a lot of hemming and hawing / looking at the various router kits available I decided to pursue a similar setup as these are nicely made systems. I picked up some older Adept / NSK stuff. Mechanically the slides are very similar, but with different servo motors. I'm assuming you are using Yaskawa servos as opposed to the Tamagawa motors I have.
Did you put together a more modern controller? I am attempting to do all of this with the older Adept MV controller and still wondering how best to set up a split axis. As it is right now, I have the original xzy machine's specification, and a separate spec / robot profile for the additional Y axis. Was thinking maybe to just write some code that asks robot # 2 to match all the positions of the primary y axis.
What did you end up doing? I'd really appreciate any info you might share about your split axis setup.
Best,
David