 Jim Shealy
Jim ShealyNote that this is a LARGE project! I am working on writing up what I've done so far, as I'm a few months behind on documentation... But, here's a video with the current progress level!: https://www.youtube.com/watch?v=mwVzRYI0Vrk
0%
0%
RoboBarista: A Coffee Brewing Robot
A flexible, open source robot arm that grinds, pours, and serves only the best robotic brewed Coffee.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 Crypto [Neo]
Crypto [Neo]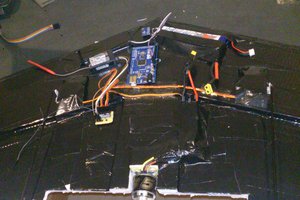
 cb22
cb22
 Rudolph
Rudolph
 Alex Brown
Alex Brown
It's truly perfect engineering! It's been very baffling to "graduate" from Arduino, yet I'm wanting to do an entire instructional exercise on the fundamental do's and don'ts. Whenever I've made it work,flat white coffee is really flawless how much documentation they give you with every part!