 Patrick Joyce
Patrick JoyceUpdate: Jan 2017. I have reluctantly decided to stop work on this project, because i've come to the conclusion that the basic premise is flawed. However, i've started a new bionic hand project on new principals. Raimi will still get a bionic hand - i'm determined. Project page coming soon.
Concept
To create an open source, low cost, high functioning, bionic arm and hand for children with foreshortened forearms. (Or grown ups. The hard bit is making it small. Making bigger ones will be simple)
The arm must;
- be entirely open. Open hardware - open source software.
- be capable of at least four different grip styles.
- have a rotating wrist joint.
- have adaptive grip in the fingers.
- be controlled by myoelectric sensors. (sensors that are placed on a muscle, elsewhere on the body)
- be capable of doing things human arms can't.
- be made from readily available, off the shelf parts.
- cost less than £300 to build at home.
- be developed for, and with, someone who actually needs it.
- be practical, durable and useful.
- be lightweight. (no one wants a brick on the end of their arm, regardless of how amazing the brick is)
- be reproducible and complete (not just a hand on its own).
My Design
The key elements of my design are as follows;
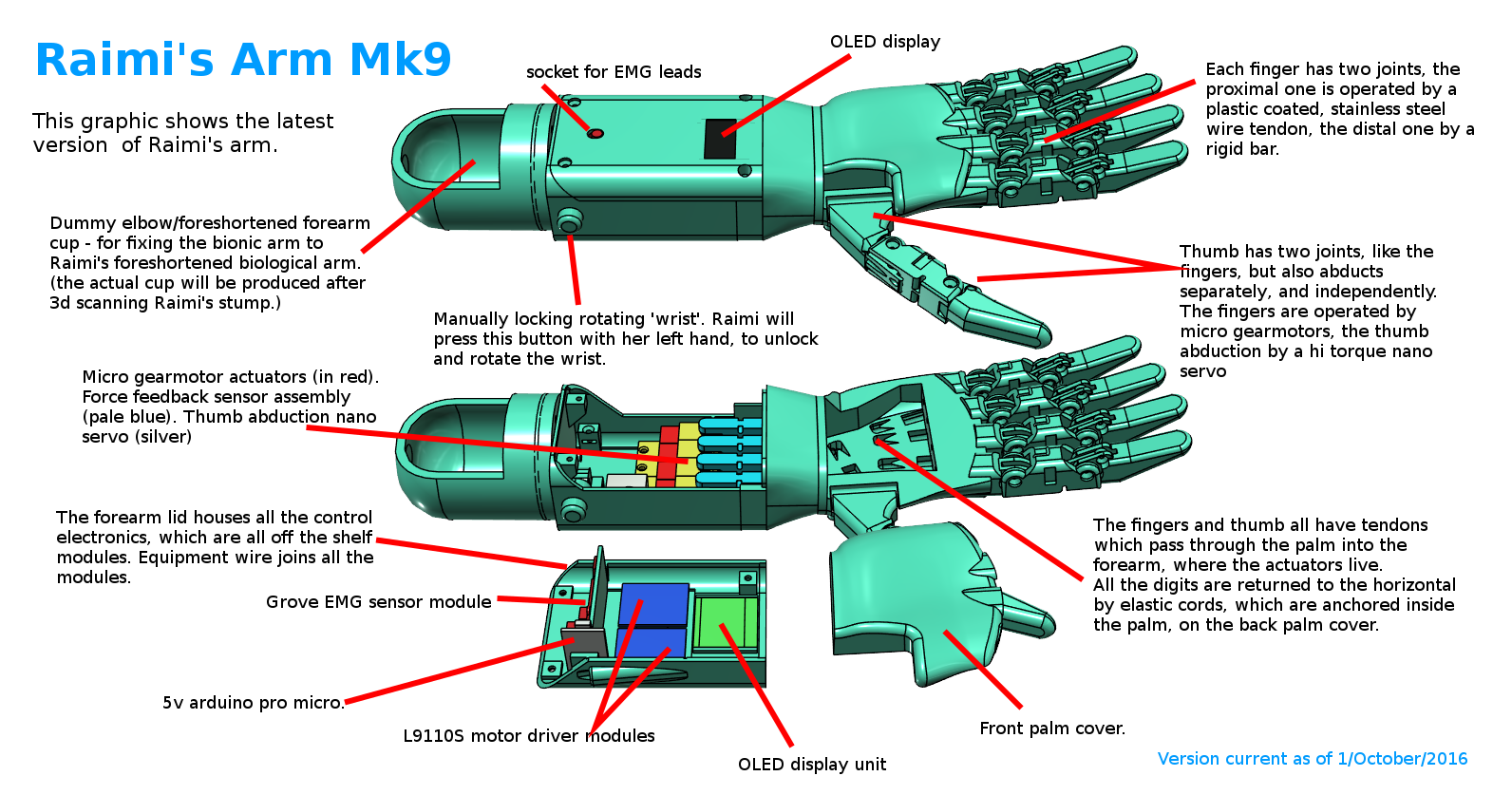
- The hand – a 3d printed, articulated hand. With tendons running through the wrist.
- The forearm front section – a 3d printed forearm containing the following;
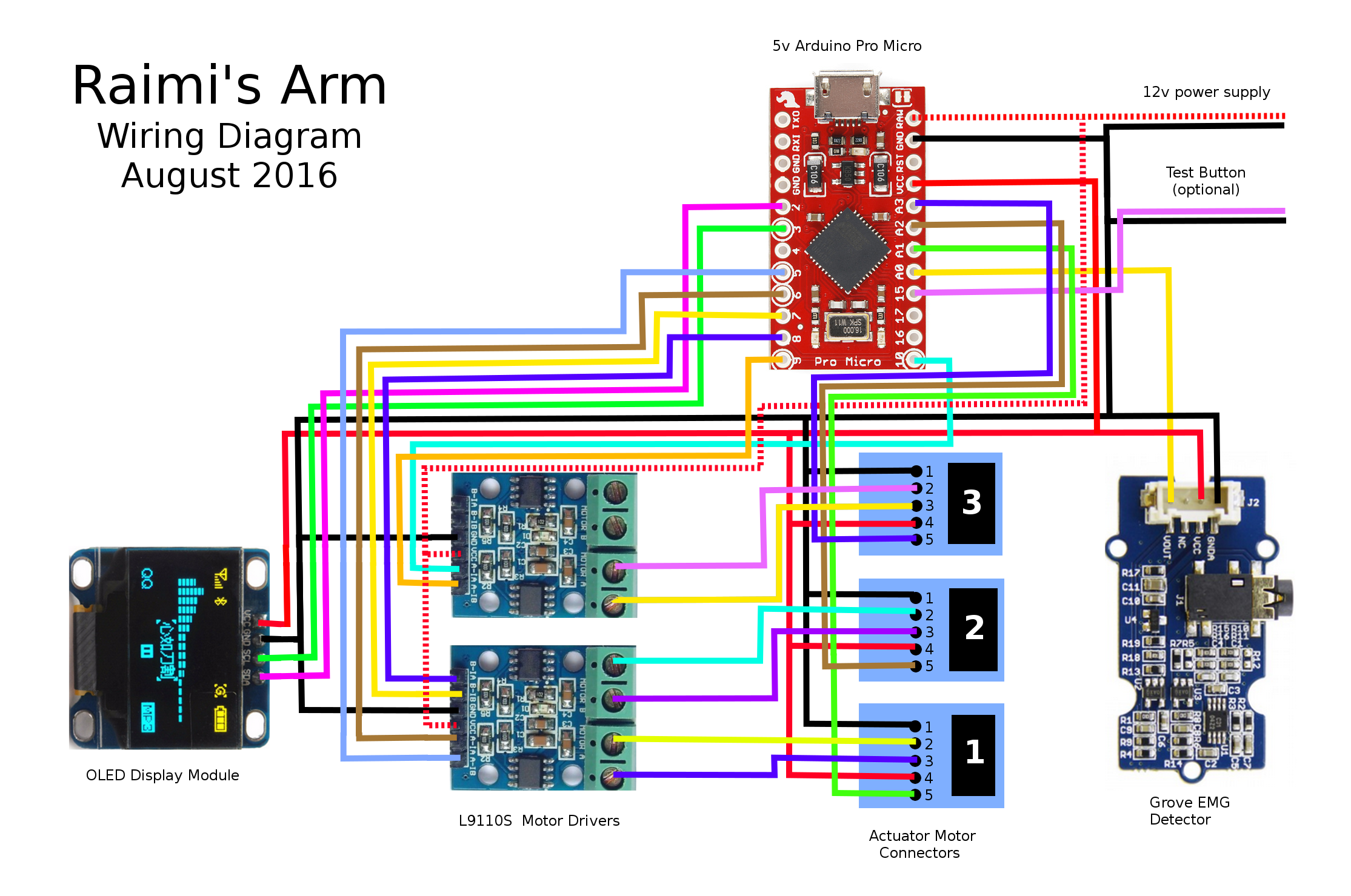
a) Arduino – main controller for the arm
b) Myoelectric control module – I intend to control the hand with myoelectric sensors, placed elsewhere on Raimi's body
c) Oled display – for showing system status to the user
d) Internal mounting points for actuators. - The forearm rear section – a 3d printed socket for Raimi's residual forearm, and a rotating 'wrist' section.
- The cable – a power supply cable, to connect the arm to the power pack.
- The power pack – a belt mounted, rechargeable, 12v battery. Off the shelf.
October 2016
The new style finger and thumb articulation is working well, and the forearm design is mostly done. But the not quite resolved actuator situation means I'm not going to get the whole arm prototype working in time for the finals. Oh well, disappointing indeed, but the important thing is making Raimi a bionic arm, not making the hackaday prize podium. So, the work continues apace.
The new force feedback actuator design is moving forwards at a terrific speed (more on that In the latest update), and is almost ready for integration into the forearm. I'm developing the firmware in parallel with the actuator, to simplify and compartmentalise it. Other than that, there's lots still to do. Oodles of programming work to get it working properly. Myoelectric muscle sensor - this is how Raimi will control the hand, open and close the grip, and cycle through the grip styles. I am yet to experiment with the sensors, despite having them for months. Way overdue. The problem is that I have advanced ALS and don't have any muscles left myself, to test it on! I'll have to experiment on my children instead. I also need to get to grips with the 3d scanner I bought to scan Raimi's residual forearm. This should enable me to make a closely fitting cup, to join Raimi to the arm.
Open Source
The entire Raimi's arm project is licenced under the Creative Commons licence,
Attribution-ShareAlike 4.0 International
(CC BY-SA 4.0)
Message me if you would like any of the in progress project files, software, CAD files, etc.
The Story so Far
I made contact with Raimi's dad in December 2015, and he kindly provided me with some measurements of her non foreshortened arm and hand, and her foreshortened forearm. Now I knew the parameters within which I would have to work.
I decided that the finger design would probably be the hardest part. So I'd better start there!
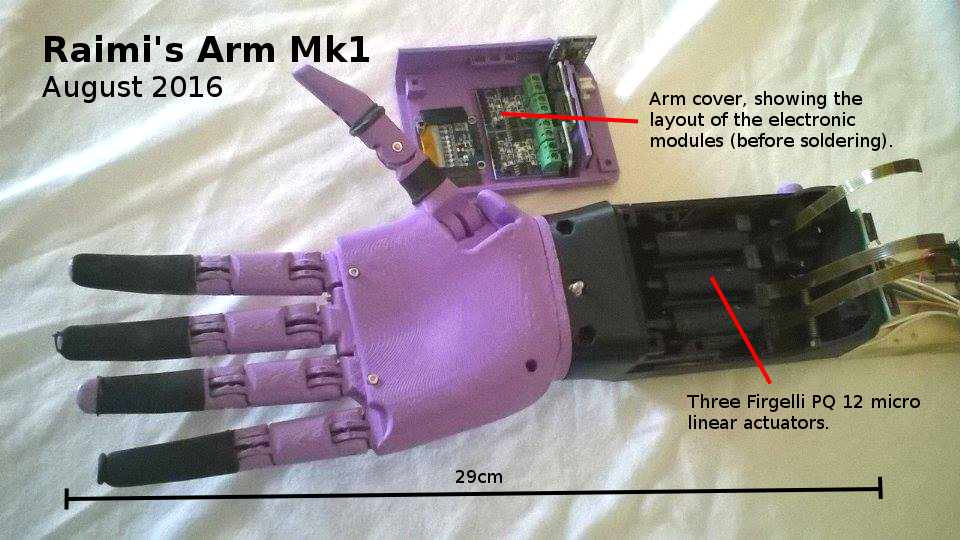
By mid January, the finger had reached the fourteenth prototype, and I was happy enough with it, that I was ready to start designing the hand itself. I looked at various small actuator options, Firgelli linear actuators (beautiful ...
Read more »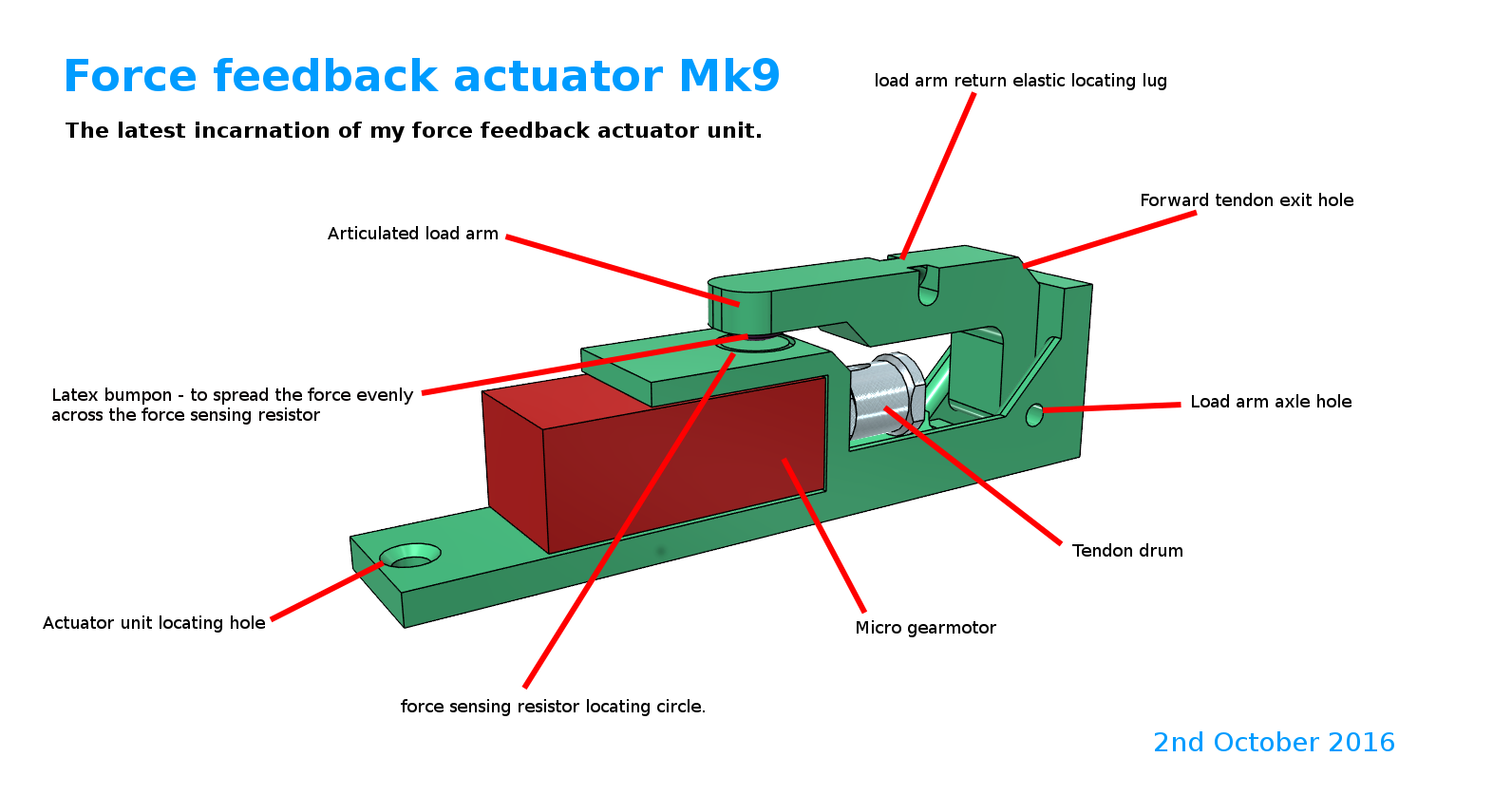












 Dan DWRobotics
Dan DWRobotics
 Nick Rehm
Nick Rehm

 Stryker295
Stryker295
Hey! Is it possible to get CAD files for this arm?