EK
EK-
Robot AHRS Magnetometer Testing (with snow!)
11/13/2016 at 18:18 • 0 commentsIn order for the robot to follow along a straight compass heading, we use AHRS with the 10 DOF IMU onboard the robot. This means the magnetometer is tilt compensated, and that the gyro sensor is fused with the magnetometer.
We were using the Madgwick AHRS algorithm. The code for the robot is here
Here you can see the tests in action:
Results
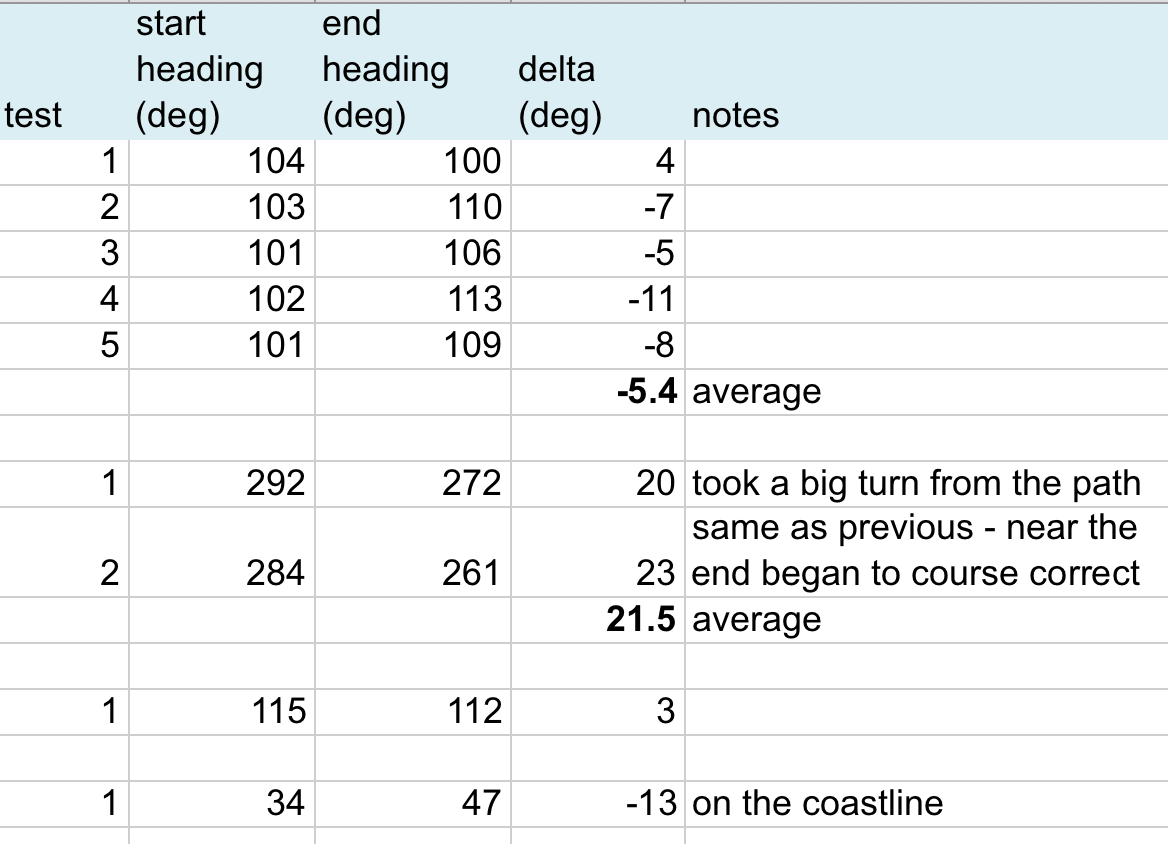
Over the length of approximately 12m, here is what our results were:
![]()
The robot performed better going east than it did south. This might be due to improper hard-iron and soft-iron calibration of the sensor.
Observations
![]()
Given how cold it was, the robot had good traction in the snow. After going forward for some time, snow would build up on the outside of the wheels.
![]()
It's cold near the water in the winter, but all of this for collecting new information on the robot to improve it
![]()
Outcomes
Next time we improve the robot, we will be using a Kalman Filter instead. This will allow us more control over what sensor is listened to, and how it is corrected, to get the compass heading.
-
FIELD TEST: Hackaday Edition
10/31/2016 at 01:06 • 0 commentsOur next Field Test is a special Hackaday edition as a workshop during the SuperConference!
![]()
Saturday, November 5th 2-5pm
Central Park (just near the DesignLab)
in Pasadena, CA!
Tickets available here
Facebook event here
We hope to see you there! Big thank you to the volunteers and participants who will be there!
AGENDA
2:00pm - walk from DesignLab to Central Park
2:05pm - Field Test in Central Park begins
3:00pm - break
4:00pm - debrief session
4:30pm - Field Test wraps up
WHAT TO BRING
- notebook and pencil for taking field notes
- your cameras for taking videos / snapshots
- water
- gloves for collecting debris
- shoes on your feet
- sunscreen
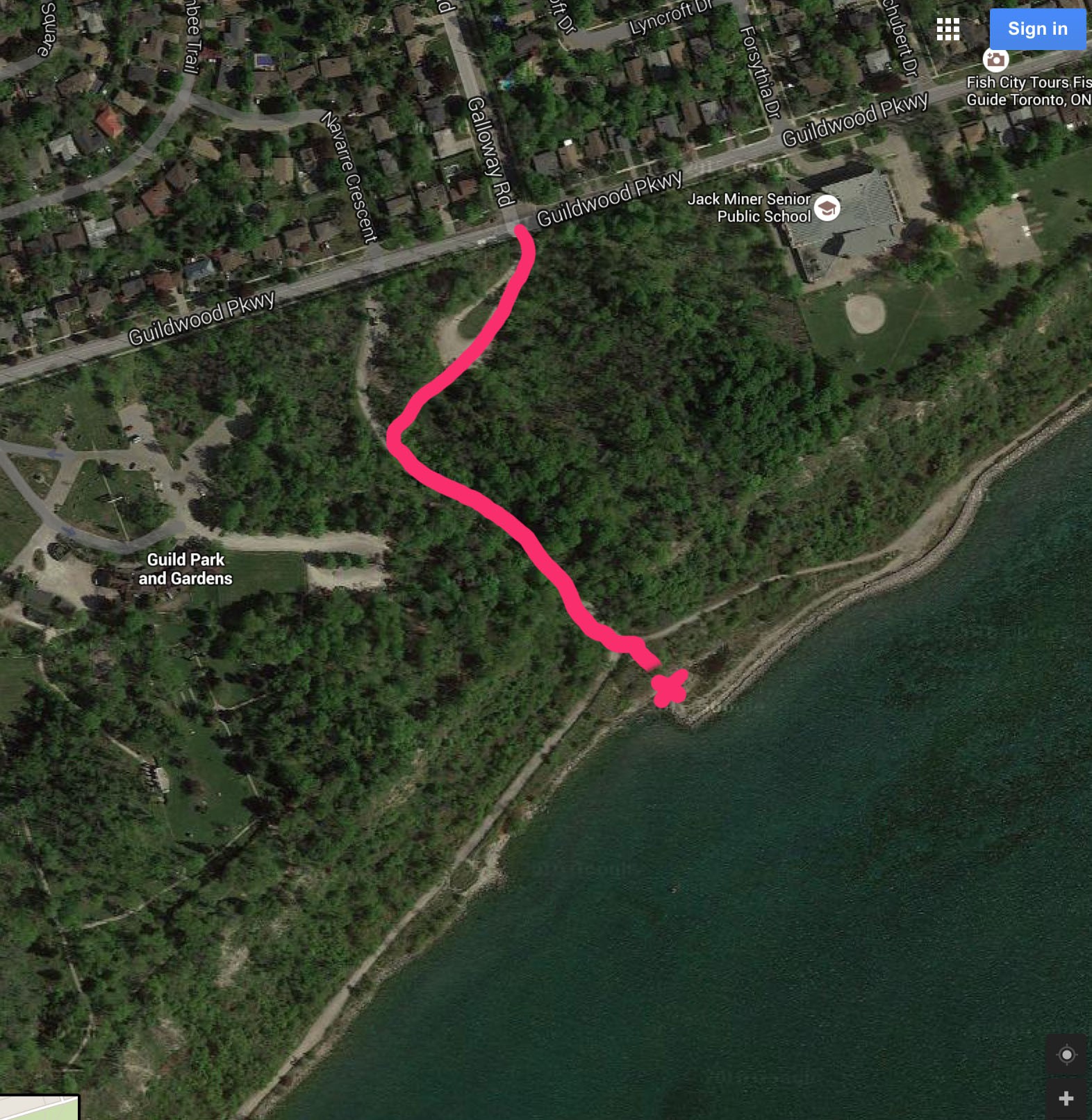
DIRECTIONS
url: https://goo.gl/maps/An9LHK3xY292
DISCLAIMER
This field test involves being in the outdoors. Robot Missions is not responsible for any injuries that happen during the field test. Robot Missions is not responsible for anything bad that happens. If something looks dangerous, please inform one of the Robot Missions crew leaders. -
The Experience
10/10/2016 at 12:22 • 0 commentsMission #1 is just the beginning. Here's a video of the Robot Missions experience to date
-
Exploration and Mud Craters!
10/09/2016 at 02:48 • 0 comments![]()
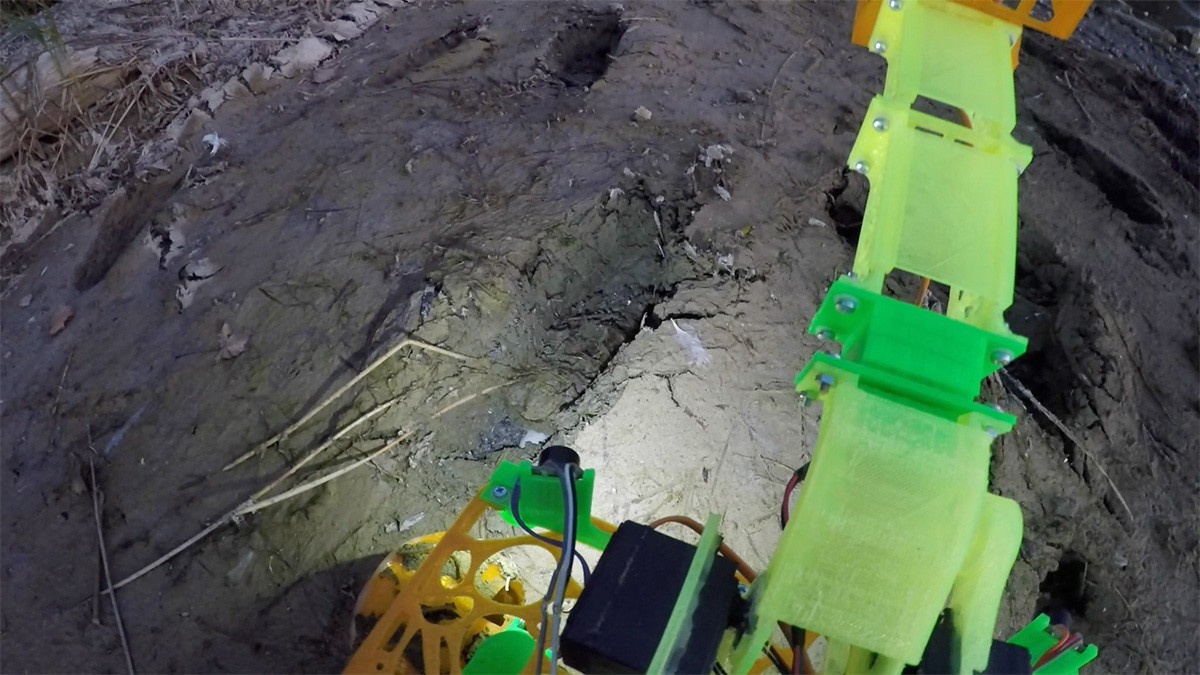
There was an area of this shoreline that was tricky to access because of all the mud. Someone before us did try - as evident from their deep foot prints! We were able to explore using the robot, carefully navigating around these mini craters in the mud
Check out the video:
The green and yellow spec with the two white lights is the robot - you can also see a portion of the flag extending:
![]()
Using this robot for exploration is valuable as we are able to observe natural spaces from a different perspective, and deploy the robot to go to areas that are less accessible to humans
-
Robot finds a fish washed ashore
10/09/2016 at 02:39 • 0 commentsWhile exploring with the robot yesterday, we unfortunately found a fish washed ashore.
Watch the video here:
Seeing this was saddening. It is evidence of the environmental issues, even at this nice location.
-
Flexible Suspension — Multi-material 3D Printed Wheel Assembly
10/06/2016 at 05:10 • 0 commentsIn order to dampen the forces that are applied to the motor axel from the wheel, there needs to be a suspension system.
During instances of forces that are applied quickly - the suspension system will reduce the 'shock' (mechanical shock) that would be taken by the motor axel and the gears in the gearbox.
The application of this design will be useful along shorelines that are more rocky than soft sand.
![]()
Assembled wheel on the robot being tested in dry / slightly damp sand
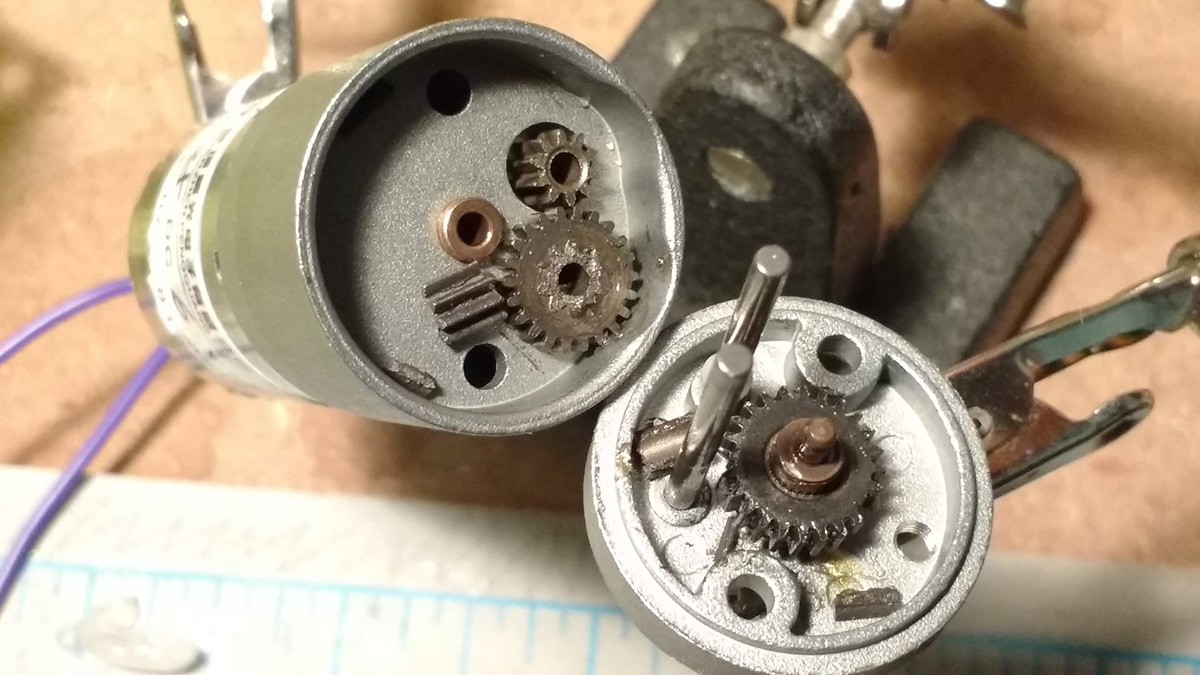
The need for this was noticed in an extreme case where the upper portion of a gear was completely sheared off, and teeth were shattered within the gearbox.
![]()
Broken gears within the 75:1 gearbox
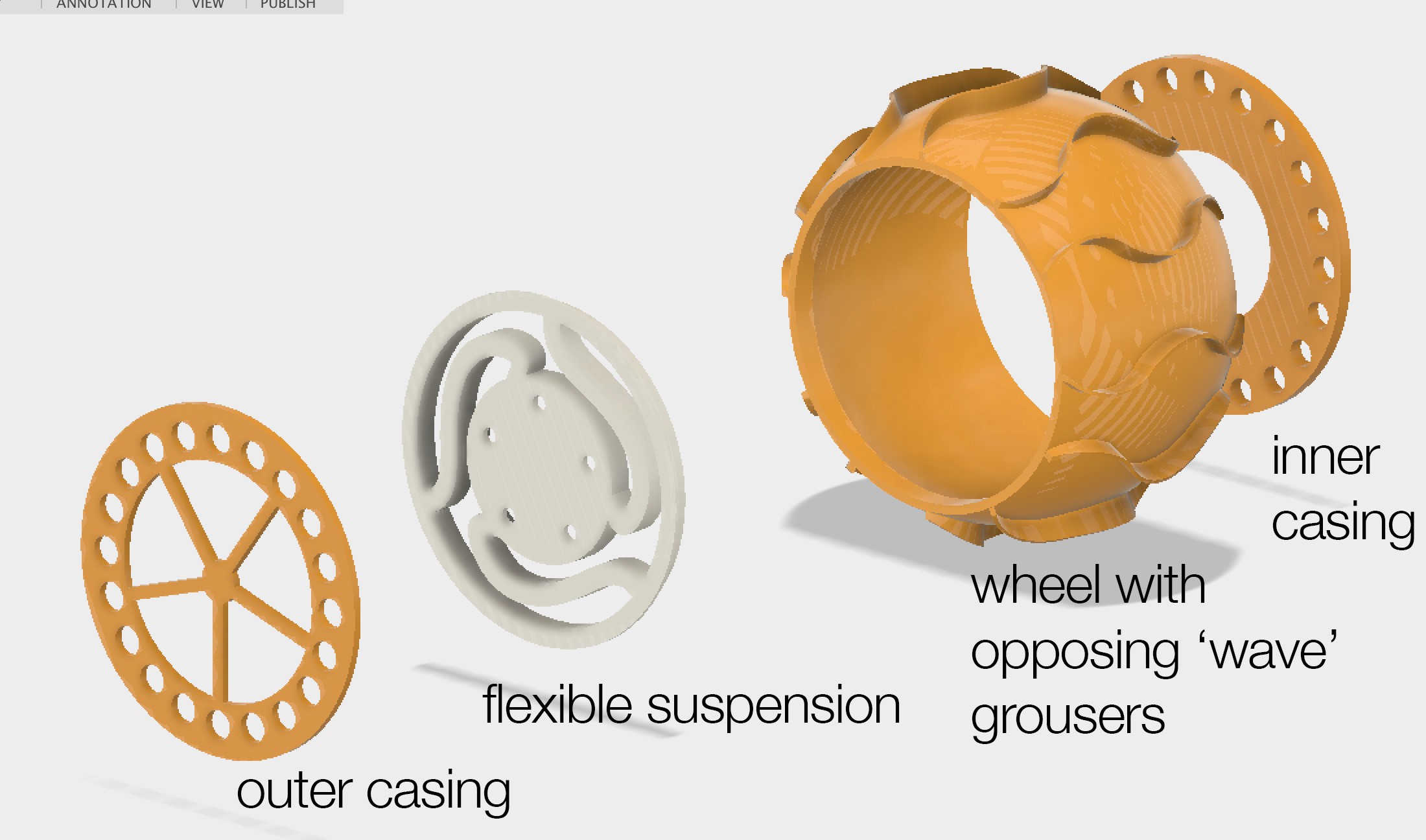
Design
The wheel is comprised of 4 pieces:
![]()
Watch this video to see the assembly:
The flexible piece was printed with 3 perimeters and 30% infill. To increase the resistance, the width of the spline shapes can be increased, as well as the infill percentage. The material is a Thermoplastic polyurethane (TPU), rated at 91A shore hardness.
Results
Slow-motion video of the new wheel assembly in action:
With this design, we were able to use the same motors - avoiding an increase in cost if the motors were to be larger.
The benefit of this approach is that this can be fabricated on a 3D printer. No need for custom parts with springs that could break and be tricky & expensive to source. The inner flexible piece is customisable to dampen larger or smaller forces according to the terrain the robot will be used on.
-
SUPER Field Test Video
10/04/2016 at 00:19 • 0 commentsWe had a blast at the SUPER Field Test! It was inspiring to see the engagement of people on the beach to learn more about how we are using robotics to improve the environment.
Collected a hamburger wrapper using the robot, thanks to the driving of a dedicated young lady! Plus, a 3 year old was able to operate the robot!
Check out the video to see parts of the experience:
-
In the Environment: Plastic Nurdles
10/02/2016 at 03:37 • 0 comments![]()
During the shoreline cleanup at Guild Park & Gardens, our attention was turned to the plastic nurdles that are near and within the frog pond. Nurdles are the pellets that are used as the raw material for manufacturing other plastic products. They are rather tiny (about 3-8mm), and can be noticed by their somewhat spherical shape.
![]()
The park is situated on Lake Ontario. The frog pond itself is behind a path and tall stone embarkment that separates it from the lake. How these ended up collecting in the frog pond is still unknown exactly - it is possible it was washed in during the winter or spring.
Observations
![]()
There are pieces of plastic on the shores of the frog pond, and also floating in the water caught within the plants.
We tried to collect as many plastic pieces by hand in 99 seconds. Collecting these tiny pieces of plastic is tricky and somewhat exhausting:
Here are our sightings of the nurdles:
![]()
Near the frog pond - Notice how scattered the debris is (top). The round, white circles are nurdles (bottom)
![]()
Edge of frog pond - fragments of plastic, including colourful nurdles
![]()
Inside the frog pond - Nurdles and pieces of polystyrene mixed in with the natural plants and water
In addition to this, we of course observed frogs in the frog pond. Apparently in the spring time, this pond is so full of tadpoles that it is black! It is a thriving area.
Effects
This TED-Ed video explains more about nurdles and their effects:
Animals ingest the nurdles as they mistake it for food. The nurdles can contain toxins, which might poison the animal. It will lead to eventual starvation, since the plastics cannot be digested. This can rise through the food chain, leading to foods that we as humans might eat.
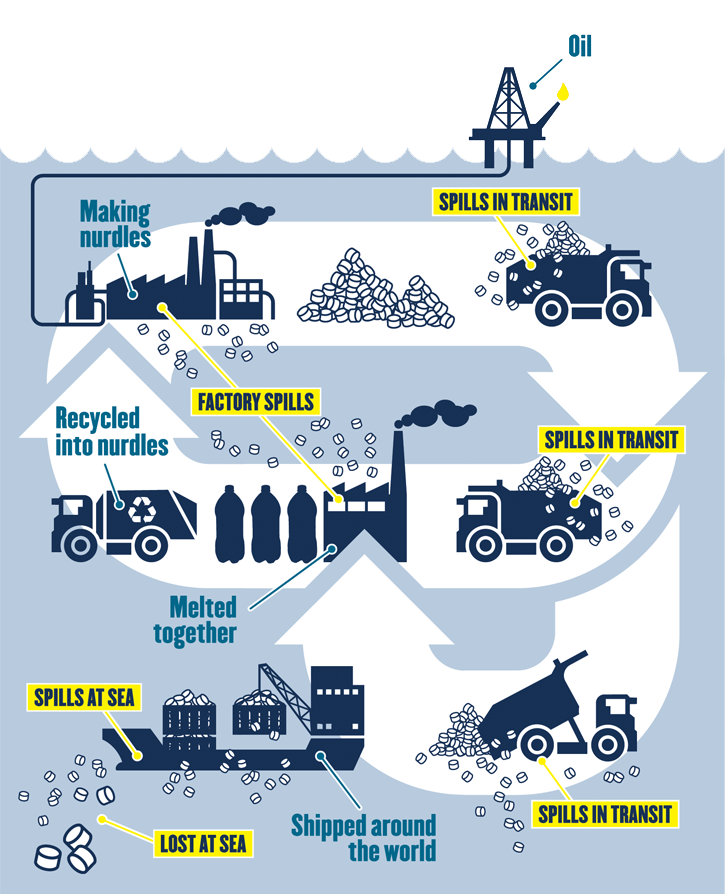
Nurdles end up released into the environment through spills in transit. Since they are small, light, and float - they end up making their way into the sea. See this diagram from NurdleHunt.org.ug:
![]()
Image credit: NurdleHunt.org.uk
Eventually the nurdles end up washed ashore, where they remain, or are swept out to sea again. Once they are on the shore, then other animals are exposed to these, and can also mistake it for food.
Conclusion
With more plastics washing ashore each day, the need to preserve our natural spaces and protect the environment becomes evermore important.
We need a more efficient way of collecting these, and a way to monitor the problem autonomously. This is what we are working towards with Robot Missions.
![]()
Robot Missions and nature, unite!
-
Robot Missions at a Great Canadian Shoreline Cleanup
10/01/2016 at 20:47 • 0 commentsSeptember 17th marked the International Coastal Cleanup Day. Groups from all around the world collected debris on our shorelines to help keep them clean. Robot Missions participated in the Great Canadian Shoreline Cleanup at Guild Park & Gardens in Scarborough (near Toronto). A total of 200lbs of debris was collected!
![]()
Great Canadian Shoreline Cleanup volunteers (with the robot!) at Guild Park & Gardens, Scarborough, ON
![]()
Starting the trek, here we are all collecting debris and tallying the results
A group of students from the local high school volunteered to help with the cleanup, and they had a great time operating the robot. It was fantastic to see the connection between the environment and robotics happening in action!
![]() Students operating the robot and observing its functionality
Students operating the robot and observing its functionality![]() Operating the arm to collect debris that was buried in the sand
Operating the arm to collect debris that was buried in the sand![]() Always inspiring when younger kids operate the robot and learn more about it!
Always inspiring when younger kids operate the robot and learn more about it!We saw a variety of debris - ranging from a tire, to an old transmission, and many pieces of tiny trash near the frog pond. The tiny trash is what initially caught our attention about this location. They posted a photo of all of the debris that was collected from the frog pond in the spring. It was countless amounts of fragmented plastics, including nurdles.
Robot Observations
1. The variety of sizes of debris will mean the end effector on the robot will have to be defined for a specific type. The current version of the scoop would need a finer mesh to be able to collect the plastic nurdles.![]()
2. The wide area that the pockets of debris are will mean the robot will have to traverse distances - perhaps in a specific pattern, or randomly- similar to a Roomba. The usage of GPS will assist with this, especially for setting waypoints where the robot can navigate to.
3. We did encounter difficulties with the wet sand accumulating on the wheels and reducing traction. More dramatically, we are seeing gears shearing off within the gearbox of the motor. We would probably only have experienced in the field, since trying to drive the robot over a fallen tree is difficult to reproduce in the lab setting. This gives us new data to design an improved iteration for these situations.
Overall Experience
The experience of the cleanup was compelling - to see how everyone worked together collecting the debris and tallying the results. When your eyes are focused on debris, you quickly notice it. In some areas it collects in pockets, though the pockets seem to be dispersed along the entire shoreline. It was great to have the opportunity to discuss the role robotics will play in improving our environment with the local MP.
Many thanks to Rose for organising the cleanup and her endless work cleaning up the frog pond. The enthusiasm of the volunteers was contagious, showing the collective appreciation we have for nature.
-
Mass Distribution on Wheels
09/28/2016 at 01:57 • 0 commentsIn order to optimize the design of the robot and make better simulations, we need to find the maximum and minimums of the mass that is distributed to each wheel.
For example, if the robot is carrying a payload in the front, there will be more mass distributed to the front wheels.
We created a physics model to calculate the max & min masses, as well as 3 additional scenarios. Spreadsheet for the calculations is available here.
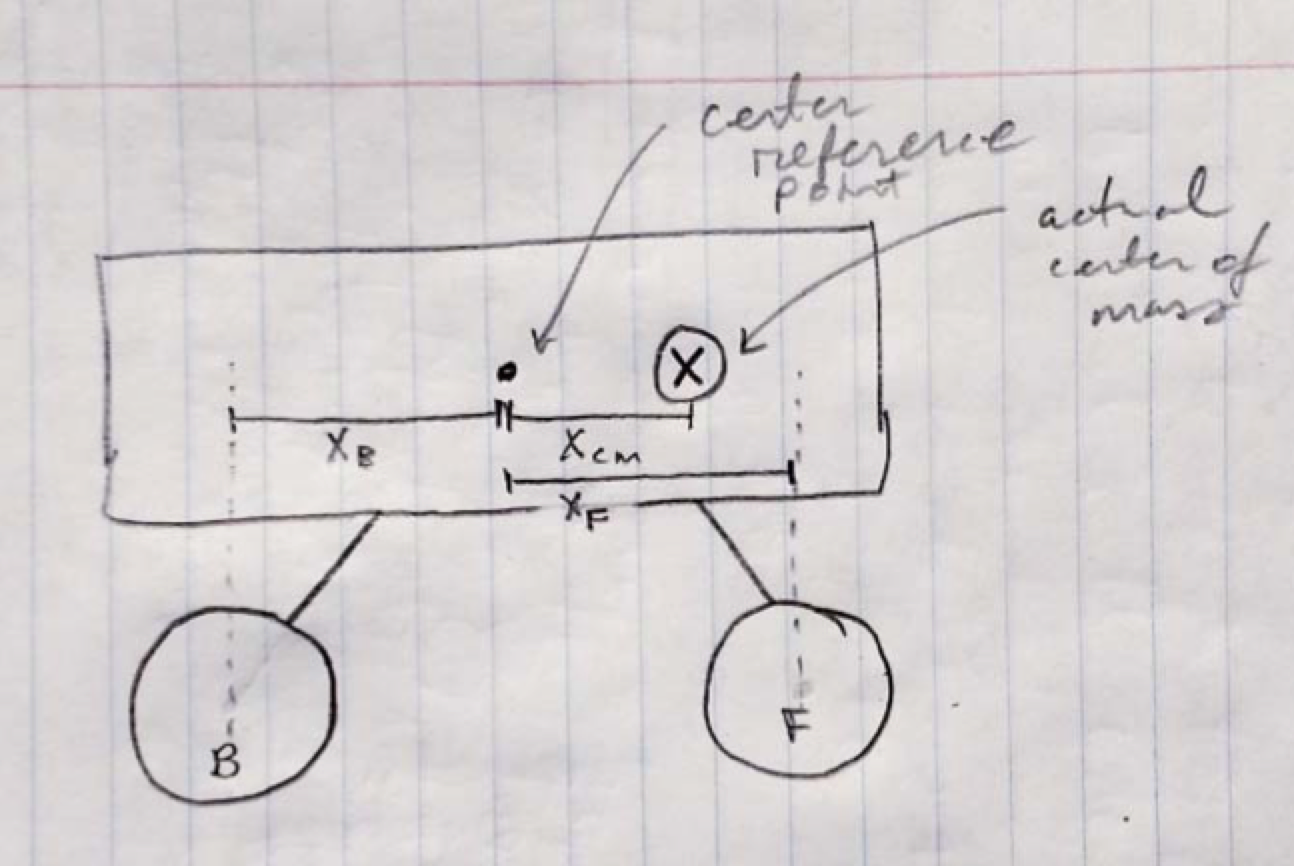
Diagram and Parameters
Here is a diagram showing the reference point, in the middle of the robot, and the distance to the actual center of mass.
![]()
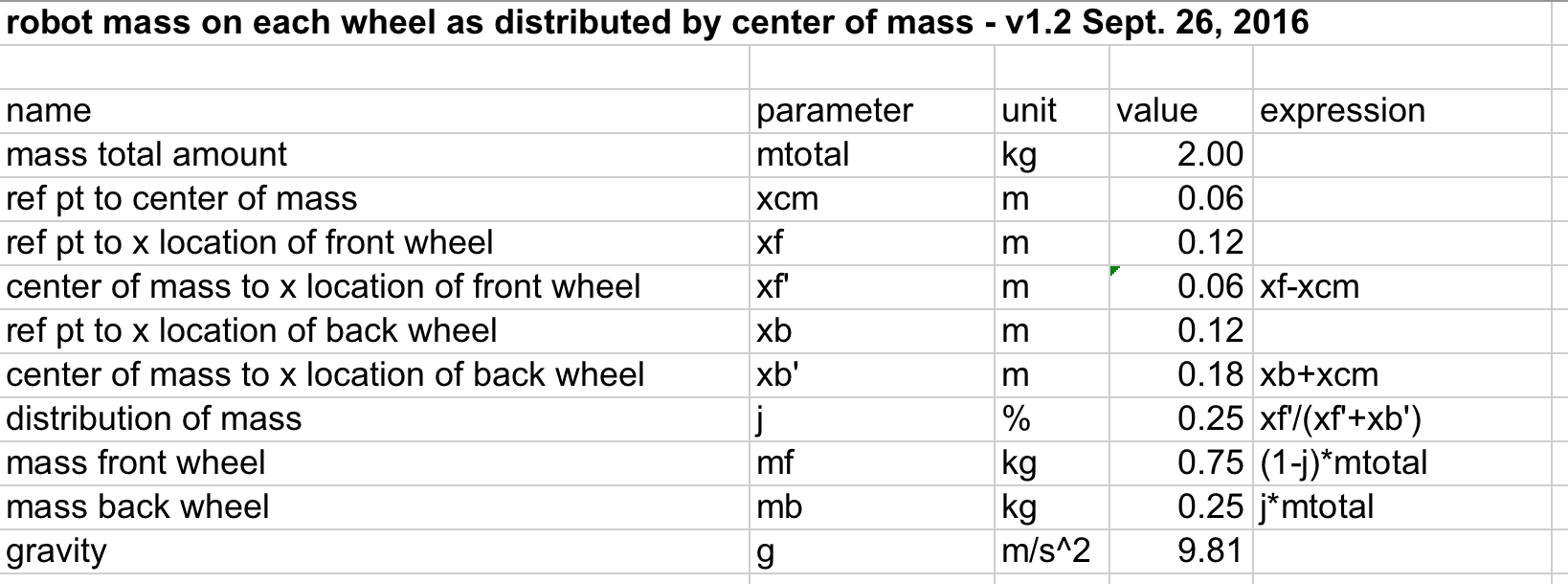
The parameters involved are listed below. The ones that we focus on varying are:
1) Total mass of the robot, mtotal
2) Reference point distance to the center of mass, xcm
We calculate the distribution of mass, j, then distribute half of the total mass to the front and back according to j.
![]()
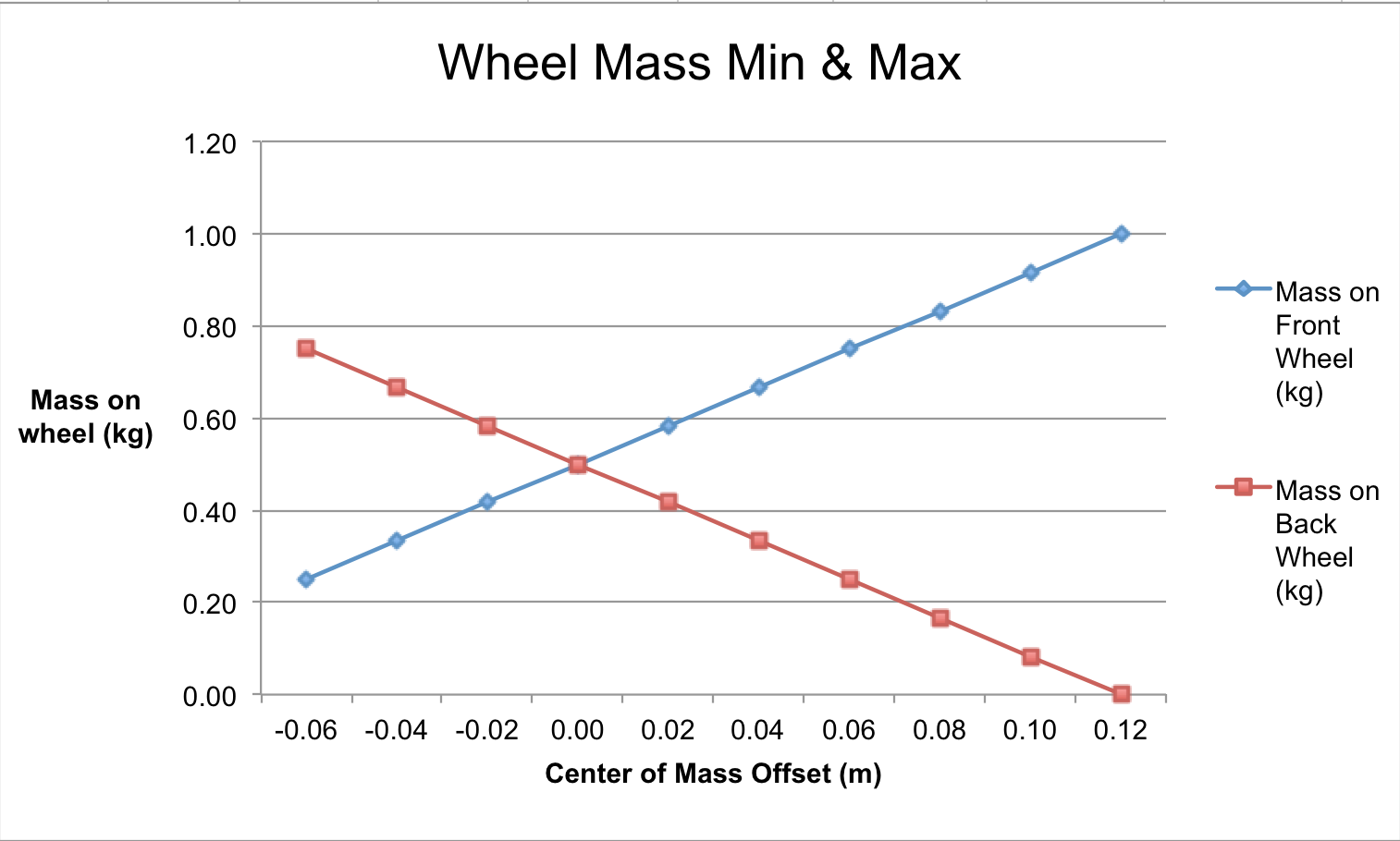
Results - Min & Max
In this graph the mass on wheel vs the center of mass offset for the front wheel and back wheel
![]()
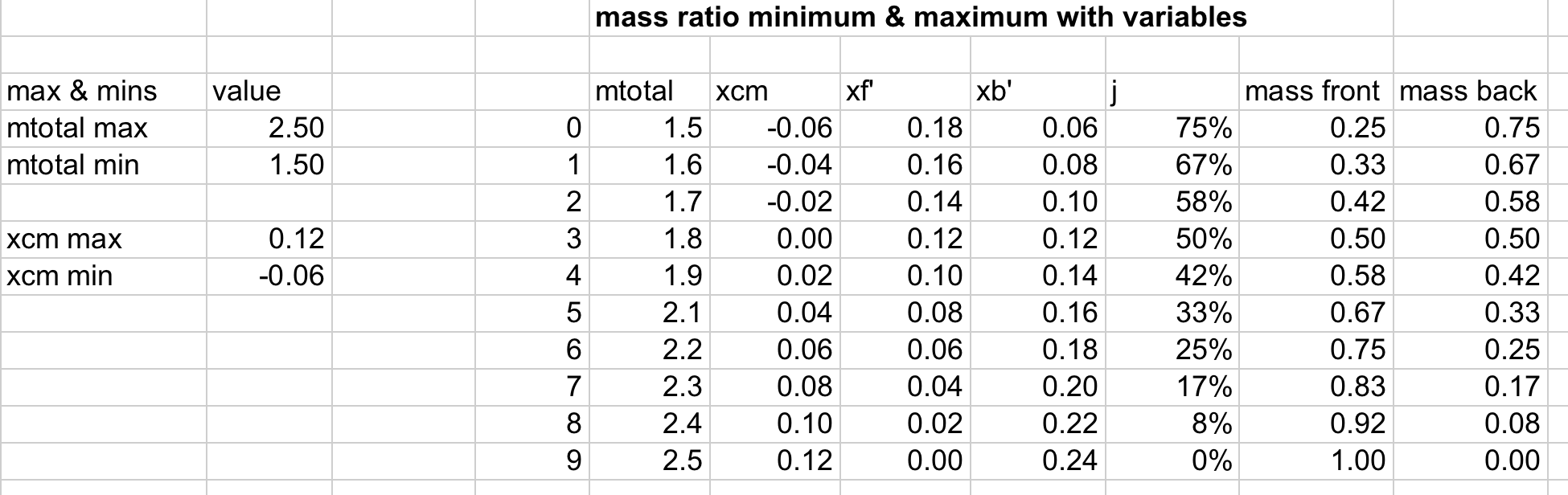
To generate the above graph, the offset is incremented from being a bit behind the reference point, to the very front of the robot. The total mass is also incremented from a minimum of 1.5kg to a max of 2.5kg.
![]()
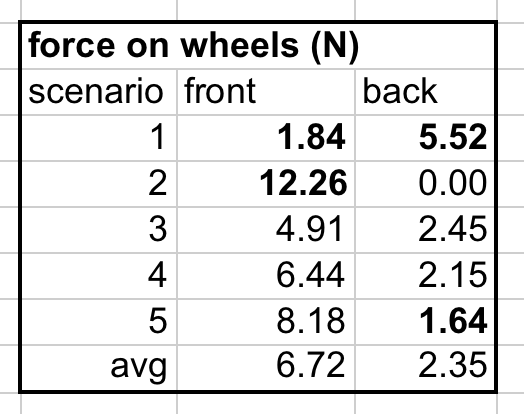
Results - Scenarios
There are 5 scenarios that pertained to these results:
1) Wheel front global min
2) Wheel front global max
3) Ideal
4) Typical robot, distribution towards front
5) Robot carrying payload on arm
The results are multiplied by gravity
![]()
The maximum force for the front wheel is 12.26N, compared to 5.52N for the back wheel. It will be best to keep scenarios 3 and 4 in mind for the what we usually encounter with the robot.
Conclusion
The main result is that now we know ranges of force that we can apply to the wheel in simulation. This will lead to better design where we can balance less material usage with strength.
Creating this physics model will be useful to experiment with other wheel designs. (We have some ideas that we can't wait to try). Futuristically speaking, this is the starting point for using generative design.
The results from this will be used for the mass of the wheel to calculate the output wheel force, given the rated torque of the motor, while travelling up a sand dune (aka incline) - and determining if it will slip or not.
Robot Missions
Makers and Environmentalists collecting shoreline debris using a robot platform