-
Ready for action
05/05/2016 at 00:32 • 0 commentsThe arm position code is now scaled to support all of the different joints. The arduino I have sort of fell apart, so I am looking forward to the next meeting with Jeff to test with a working arduino.
I removed the neck, resized, and repositioned the arm to make it more lifelike through the google cardboard. Although the arm can cause vibrations based on angles, I added the ability to also cause vibrations when it collides with objects. The only object in the scene currently is the block that shows connectivity, but I have tested it with a arm movement test script I wrote and triggers are being called appropriately to cause vibrations. I have support to trigger both front and back vibrations depending on the position of the collision on the limb, which will be cool when we eventually have multiple arduino vibrators devices for each limb.
The viewport from the cardboard is tricky. I added a floor with a wood texture so that the arm doesn't seem completely in space, but the scale of the arm is a bit off. The shadow from the arm looks much to small on the floor. I am going to have to tweak it much more. I thought it would be cool to create a pagoda training room around the player. Maybe we could make a fruit ninja game for people to play once we get this working! Ninja training ftw! -
Status and Next Steps
04/19/2016 at 19:55 • 0 commentsAs of today we have the Unity app connecting and parsing bluetooth data from the Arduino. It has support for storing angles of the complete arm, but is only using feedback from one sensor to rotate the angle of the 3d arm in virtual space. We also have been able to send a message to the Arduino to trigger a vibration. The next couple steps for the Unity application are to send vibrations when the arm collides with objects and to start using the scaling structure for multiple sensors. From there I will go about repositioning the arm so that it extends from a location and at a length that makes sense from the perspective of the user wearing the google cardboard. Right now the arm is suspended in space in front of the user for debugging purposes.
-
Getting the hardware going
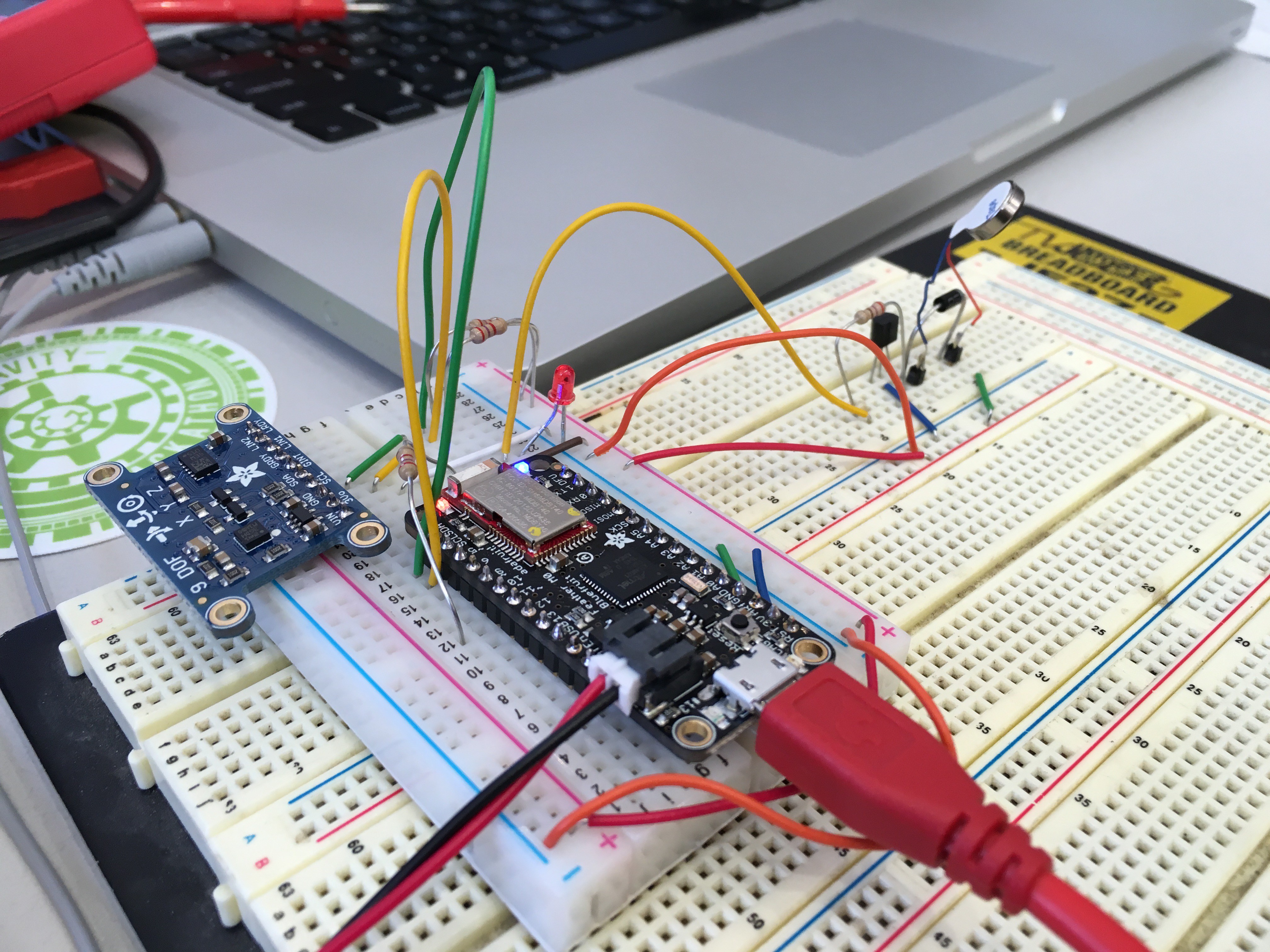
04/16/2016 at 23:29 • 0 commentsI've broken down the hardware aspect of the project into a few steps.
- HelloWorld (blink LED 13) on the Adafruit Feather Bluetooth LE - complete
- Communicate via i2c with the9dof IMU via i2c - complete
- Create a circuit to drive the vibration motors - complete
- Communicate with an iPhone via bluetooth - complete
- Relay data from 2 to the iPhone via bluetooth - in progress
![]()
As far as the software goes Matt is working on connecting with and receiving data via bluetooth in Unity 3d. We couldn't setup the Bluetooth module as a keyboard since we needed bi-directional communications. Instead we setup the module as a BLE server and the phone as a client. In order to send angular data we have to use at least a 2 byte package (360 degrees). We're going to have the overall calculations done on the device and have it send back whether the motors should be on or off.
VR Training Feedback
For the TVCOG VR Hackathon my teammates and I decided to create a haptic feedback system to help with task training.