Michael Roybal
Michael Roybal-
Making Zizzy Tetherless
10/02/2016 at 18:53 • 0 comments![]()
Two small 12 volt air pumps are now hooked in series and mounted in a backpack, to get 24 PSI of pressure. This eliminates the hose tether to the offboard pump. It is working fine but is still somewhat noisy. Work has begun on making a quieter pump that would work by compressing an artificial muscle with a gear motor cam.
-
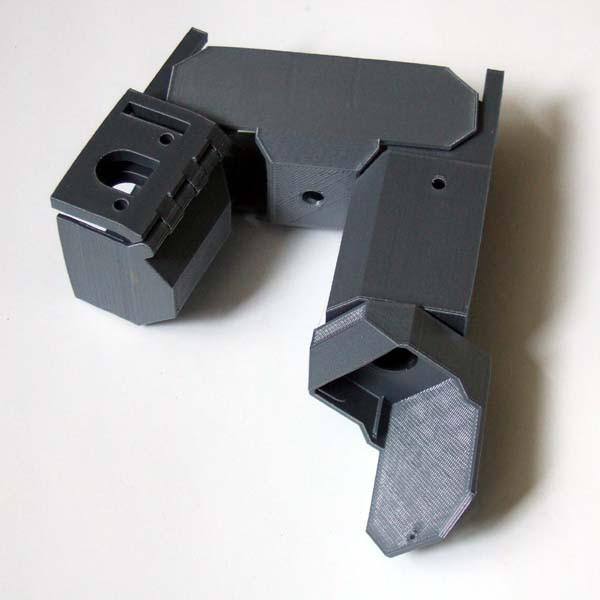
Testing The New Arms And Grippers
10/02/2016 at 18:48 • 0 comments![]()
![]()
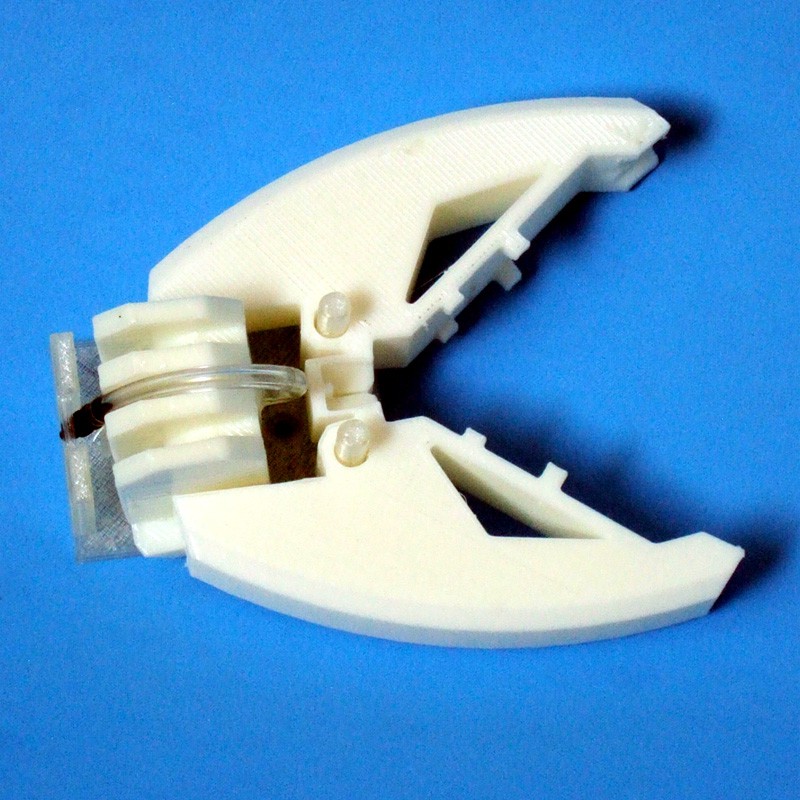
The two new arms and grippers have been installed and tested. They are much stronger and can now carry a water bottle or can of beverage. They can also manipulate small items like a stylus or medical pill.
-
Improving The Artificial Muscles And Arm Exoskeleton
08/21/2016 at 18:37 • 0 comments![]()
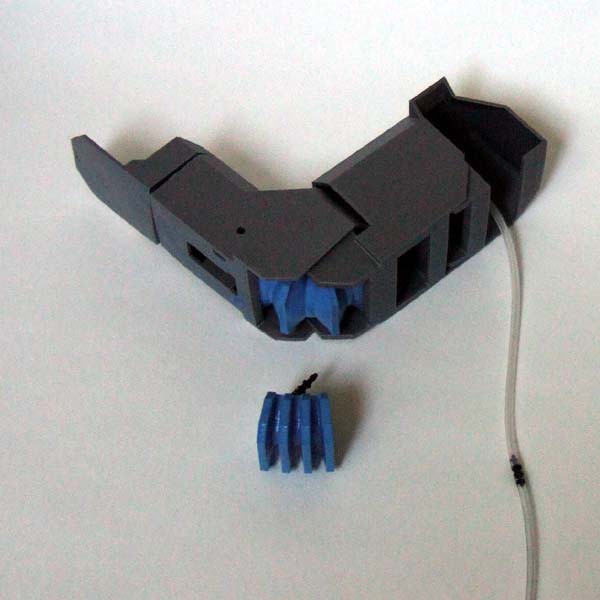
I have just finished designing and testing new 3d printed artificial muscles to replace the previous ones. They occupy a slightly larger volume and are considerably stronger than the previous versions. In addition, the plugs that held them in place have been removed and they now slot into a shelf in a redesigned exoskeleton.
The new arm exoskeleton with the new artificial muscles now can rotate about 82 degrees which is an improvement over the 47 degrees of the previous arm configuration. For some reason, after many tries, I have not found a way to get a full 90 degrees of rotation with the muscles and hinge joints currently used.
I will post the STL files for the new muscles and arm exoskeleton as soon as the new arms have been fully installed. -
Parts That Are Being Improved
07/21/2016 at 16:05 • 0 commentsTo finish this robot and make it fully functional, here are some more things that need further development:
Finish Face And Voice Phrases
The face is not yet fully functional and new words and phrases need to be added to the vocabulary.![]()
Full Remote Control
At this point, only minimal remote commands have been programmed. A new high speed valve will be added to increase precision.New Arm Joints
A new arm exoskeleton is being designed that allows for 80 degree movement of each joint. The current hinge joints and muscles only allow for 48 degrees of motion.
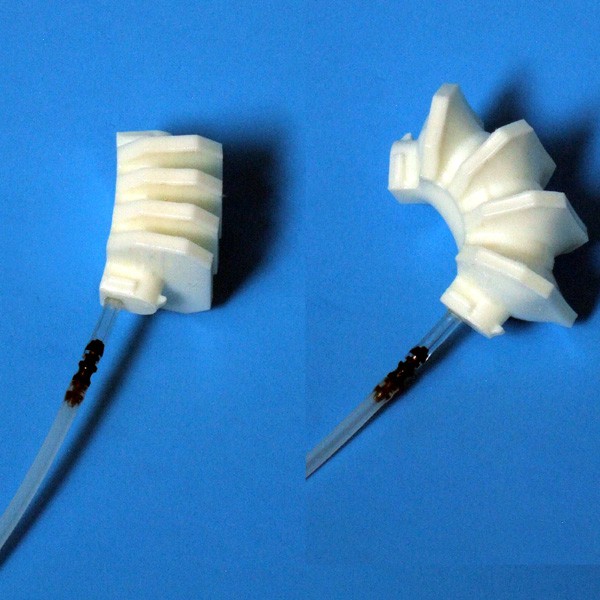
Improved Gripper
I have designed a slightly larger and much stronger muscle that will be integrated with a new and stronger gripper design.![]()
Add Sensors
At some point, I am hoping to add infrared sensors to a scanner on the head that will locate a human face to orient the robot. -
Improving The Robot
07/21/2016 at 15:45 • 0 commentsNoise Problems
As the video reveals, the air pump is fairly loud. I am trying to find small battery operated compressors that are less noisy. If anyone knows of a good source for small and quiet air pumps, please let me know.
Power Problems
Since testing the robot I have designed some new, slightly wider muscles that are considerable stronger. Small changes in the geometry of the artificial muscles can significantly effect the power output. I may redo the arm exoskeletons to incorporate the new muscles.![]()
Removing The Tether
For now, the artificial muscles are powered by a 1/8 inch hose tethered to an off board air pump. To make it tether-less, I am working on adding a backpack containing two small battery operated air pumps. They will to be hooked in series and mounted in a sound deadening enclosure on the back of the robot. -
Testing The Robot
07/21/2016 at 15:37 • 0 commentsThe robot as tested so far is fairly strong and quite reliable. The 3D printed valves are fully functional but the muscles and arm joints could be improved upon.
The video shows the robot in a pre-programmed sequence--picking up a water tube and power bar and taking it to the edge of the table. From there it could be remote controlled to feed the operator. -
Building The First Prototype
07/21/2016 at 15:20 • 0 commentsIt took over a year to make the first working prototype of the personal robot. During that time, I 3D printed and experimented with over 240 designs for artificial muscles. The most powerful muscles with the minimum volume were eventually used to power the arms and gripper. Pic shows a few of the designs that were tried.
![]()
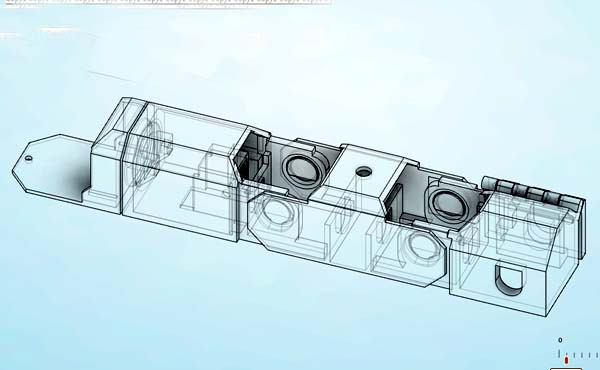
3D Printing Valves
Solenoid air valves are quite expensive and heavy. They also take up too much volume to fit in a small robot. So I also experimented with 3d printing servo controlled valves using micro-servos. One servo can control 3 valves.You can download ready to print STLs and see details on making the valves here: http://www.instructables.com/id/3d-Printing-Servo-Controlled-and-Other-Valves/
![]()
3D printing the arms and body
The robot arm is printed in one piece using PLA. It contains four built-in hinge joints. The air powered artificial muscles are printed in Ninjaflex and after they are sealed, they simply pop into the sockets built into the arms. One bolt holds a micro servo in place to rotate the wrist joint.![]()
![]()
Zizzy: A Personal Robot Assistant
Zizzy is a personal robot prototype for people with limited mobility. It can talk, show emotions, and manipulate desktop objects.