Beaglebreath
Beaglebreath-
steel table under construction
10/30/2014 at 17:43 • 0 commentsAll righty, it has been a while since I posted an update. As of this morning, I've got the zipit and it's electronic hardware more-or-less operating and sending speed of light information back to the interferometer. The zipit is displaying sensor data and interferometer readouts on a simple web page. I will style up the web page in the near future. This is reliable enough for me to start working on the layout table.
I have ordered a 500 pound, 45"x16" steel layout plate with 5 t-slots running the length of the plate. Once it gets here, I have hired a machinist to cut a 1/2 inch wide slot through the middle of the plate. He will also build a steel table to place the plate on.
On the underside of the steel plate I will place the moveable optics of the interferometer. They will be mounted to moveable jaws. The moveable jaws will be shaped similar to the jaws of a caliper. The measuring points of the jaws will be inserted through the 1/2 inch slot from below the plate. The two measuring points will be able to be moved in the slot and will provide the ability to make inside and outside measurements.
-
holy guacamole! it actually works...
09/03/2014 at 16:26 • 0 commentsI've been busy as a one armed hat rack for over a month now and haven't taken much time to work on this project. Finally, I was able to spend some quality time with the interferometer over the three day weekend. I have created a new flowchart of how the software will interact with the interferometer, and I rewrote some of the older i2c code, now that I have learned some new tricks.
Anyway, last night after writing c code and a shell script, I was able to have the Zipit calculating the index of refraction of light once every six seconds. after a little more scripting, I was able to transmit the updated index of refraction to the interferometer.
To my delight, I saw that the interferometer began to agree with my digital caliper across it's total range.
-
Overview Video
08/20/2014 at 19:08 • 0 comments -
html server
07/14/2014 at 07:43 • 0 commentsthe primary reason I chose to use this distribution of openwrt is for the node.js scripting, which will allow me to provide an html server and be able to run shell scripts.
![]()
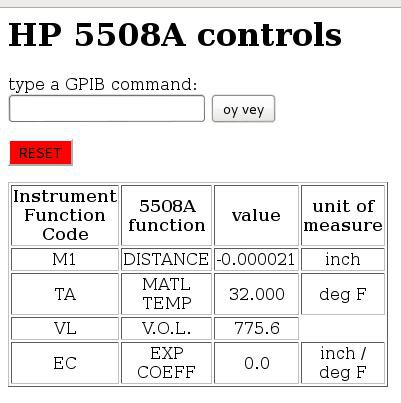
Here is what the web page looks like so far.
This is my first journey into java script, and here is what I have so far;
- When a client accesses the web page, and makes a POST request, the server sends the client the web page shown above.
- Then a couple of shell scripts are executed.
- The first script runs some i2c commands to get the latest data from the environmental sensors and calculates the speed of light.
- The second script communicates with the HP5508A over the GPIB adapter.
- The third script knits together a new HTML file to send to the client the next time it makes a POST request.
There are a bunch of problems with this approach, but it at least has given me a first step toward accomplishing something.
-
pcb's for the temperature sensors
07/11/2014 at 08:00 • 0 commentsI will use a total of four MCP9804 temperature sensors. They will provide the temperature of the object being measured and the air temperature.
Sensors on an i2c bus have addresses to differentiate one sensor from another. The MCP9804 can be addressed by changing the wiring on three of the pin connections of the sensor's case. Applying voltage to a pin sets a bit high for the address logic in the sensor. I have designed a set of circuit boards which have set the address pins to different values for the sensor attached to the circuit board.
This table shows the name of the sensor, description of it's use and the i2c address.NAME DESCRIPTION i2c ADDRESS TA Air Temperature
0x1c M0 Material Sensor 0 0x1f M1 Material Sensor 1
0x1e M2 Material Sensor 2
0x1d
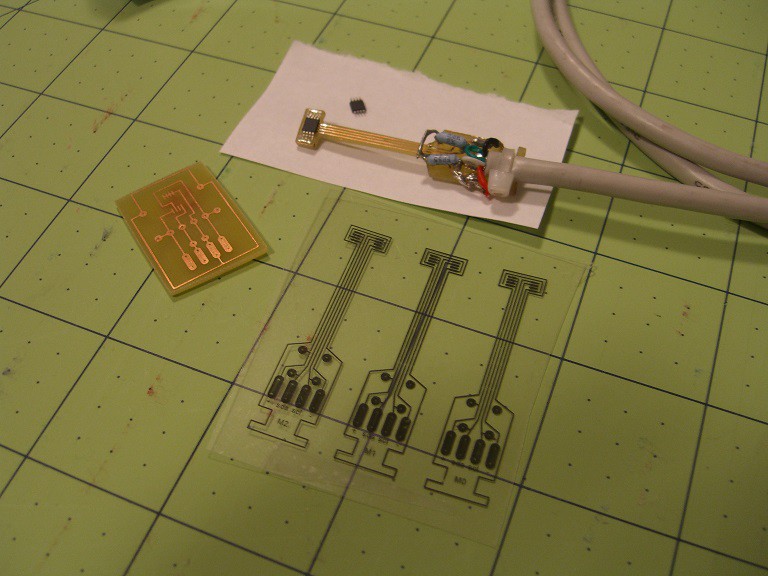
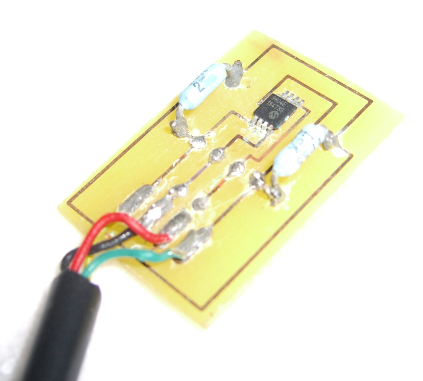
The following picture shows some of the evolution of the temperature sensor pcb design. The rectangular pcb is the first design built. This circuit layout works well for testing, but doesn't look as cool as the guitar shaped design I came up with next. However the boring rectangular design works correctly. The second design has been a failure so far.
![]()
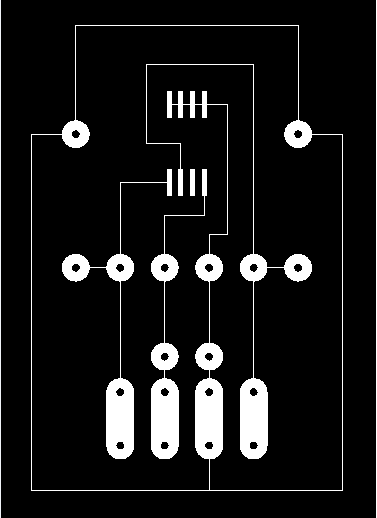
The following is an AutoCAD drawing of the original pcb. Solder pads are provided for the two pull-up resistors, a decoupling capacitor and the temperature sensor itself.
![]()
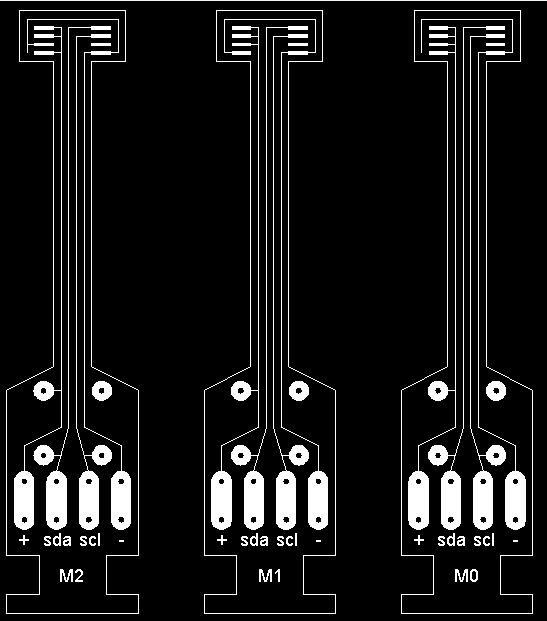
Finally, this is the next revision of the temperature sensor circuit board. it allows the sensor itself to be placed into a tighter area. The differences in the three circuit boards establishes the i2c addresses. But after etching a set of these circuit boards, and assembling the circuit, I have not been able to establish communication with the sensor.
![]()
Each of these will be wired in parallel.
-
howto i2c with Zipit
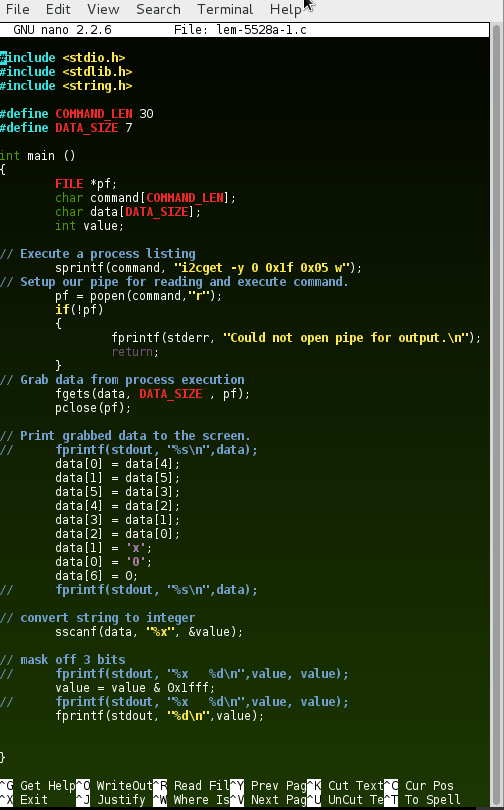
07/09/2014 at 07:49 • 0 commentsThe following code controls a Microchip Technology Inc.'s MCP9804 digital temperature sensor.
The following was developed on a Zipit Z2 running openWRT. The distribution includes the nano text editor and picoc c language compiler. Some of the following code was blatantly cut and paste from other peoples web sites and from many many internet searches.
The first half of the code executes a user command and pipes the output of the command into an array of chars. The user command that gets executed is:
i2cget -y 0 0xlf 0x05 w
- i2cget is a program which reads data from an i2c device
- -y option disables user intervention
- 0 designates which i2c bus to use for communication
- 0xlf is the chip address of the temperature sensor
- 0x05 is the memory address location of the temperature data
- w specifies that a word length of data is to be retrieved.
The second half of the code rearranges the order of the chars since they are received from the i2c sensor in a funny order. After rearrangement, the array of chars is converted to an integer. The most significant three bits are masked off. The remaining integer can take a value from 0 to 8192 representing temperatures from -40 °C to 125 °C.
![]()
-
Zipit Z2 Docking Connector
07/08/2014 at 17:25 • 0 commentsOn the rear of the Zipit Z2 is a 36 pin docking connector which gives you access to great things. The connector is a 36 pin which will connect to a Hirose ST40X-36S-CV(80). These are usually available from Digikey and Mouser. The connection provides:
- DC power input ( 5 V dc and ground)
- +3.3 Volt output
- 1.8 Volt output
- audio speaker output
- audio microphone input
- USB data + data - and power
- i2c connections, sda, scl, power
- and 16 gpio connections
The connector is the greatest thing in the world to solder when you have had too much coffee. I got frustrated with the tiny tiny wires on my cables breaking so I designed and built a breakout board to connect to the Zipit Z2.![]()
This breakout board makes life much easier when experimenting with the Zipit. The circuit board is a double sided board. I drew the layout using AutoCAD and printed using 0.5 mm wide traces. I ended up mass producing a bunch of boards at once, with the hopes that at least a few would survive my DIY etching process.
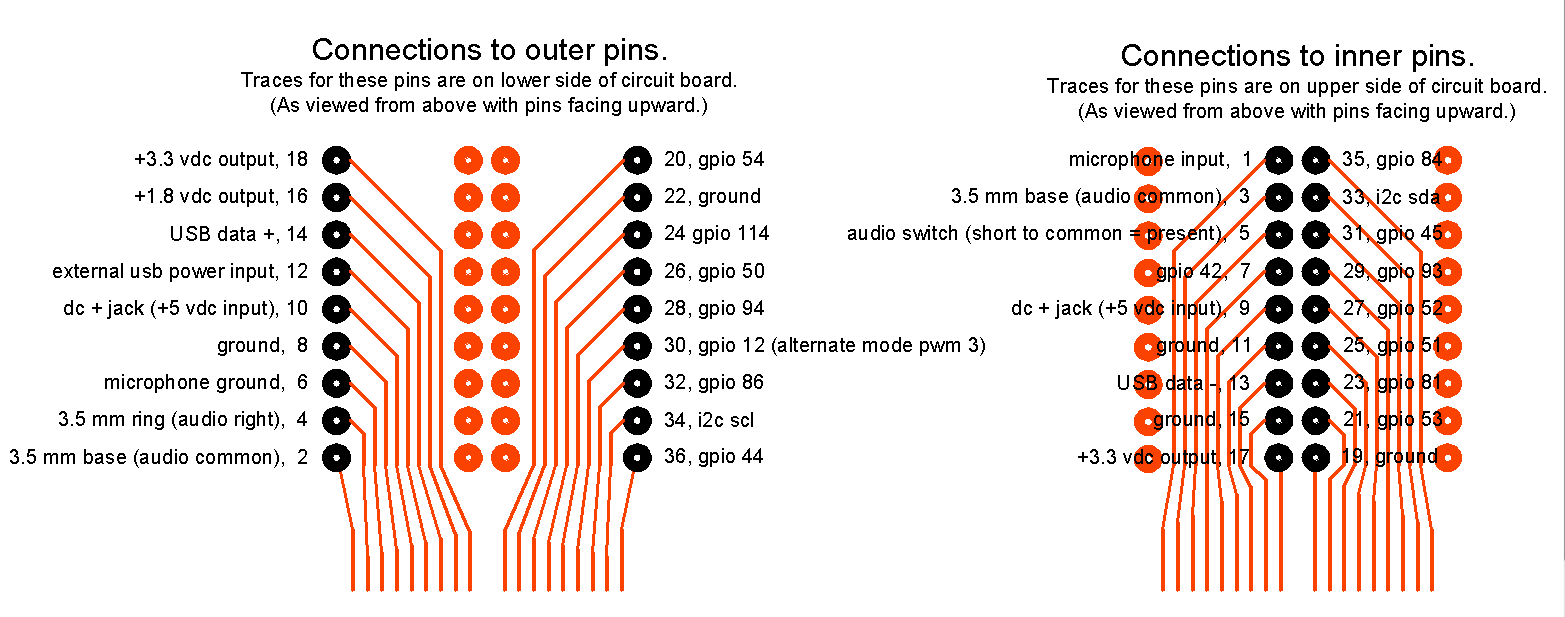
Here is the pinout
![]()
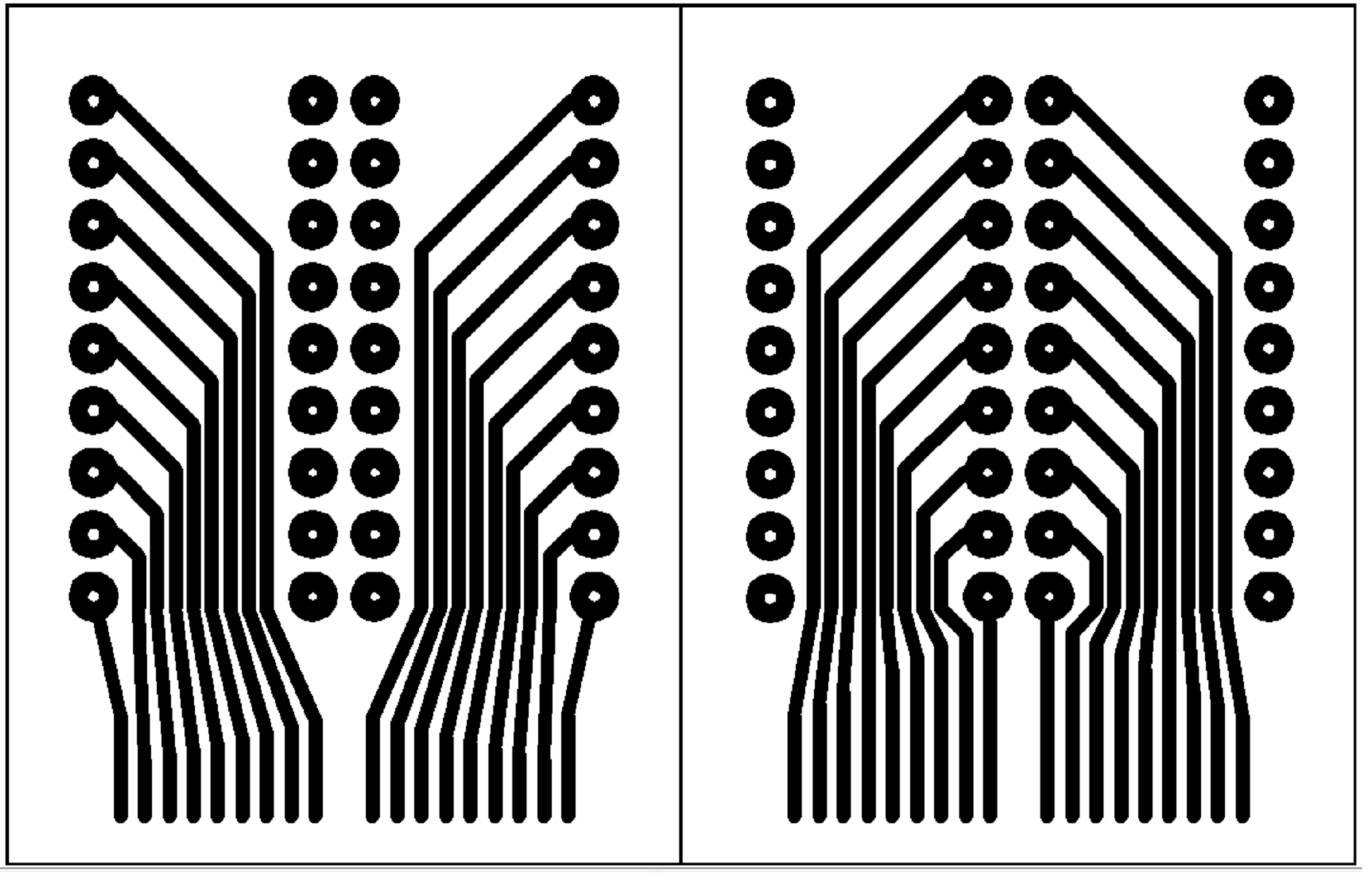
Here is the layout of the double sided circuit board.
![]()
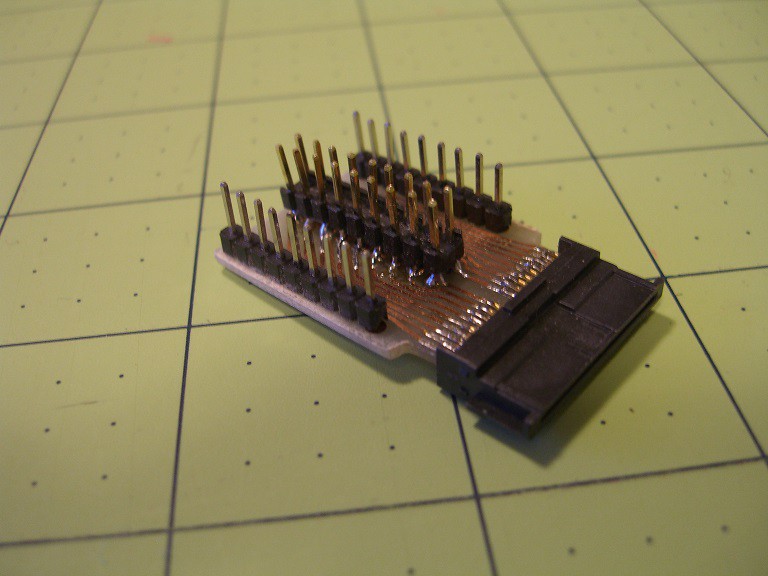
The picture below shows off the docking connector with a USB cable soldered to the 0.1 inch header, as well as a 4 conductor cable for the i2c connections.
![]()
The umbilical cord that is shown above is a god-awful mess. I am going to redesign a connector board which will provide 4-pin connections to the the zipit for i2c sensors. I will stack the circuit board of the USB hub on the new circuit board, and I will integrate the power supplies into a more compact solution.
But at least this way I can get this project functional, until I am able to make it look pretty.
-
how the electronic stuff is connected
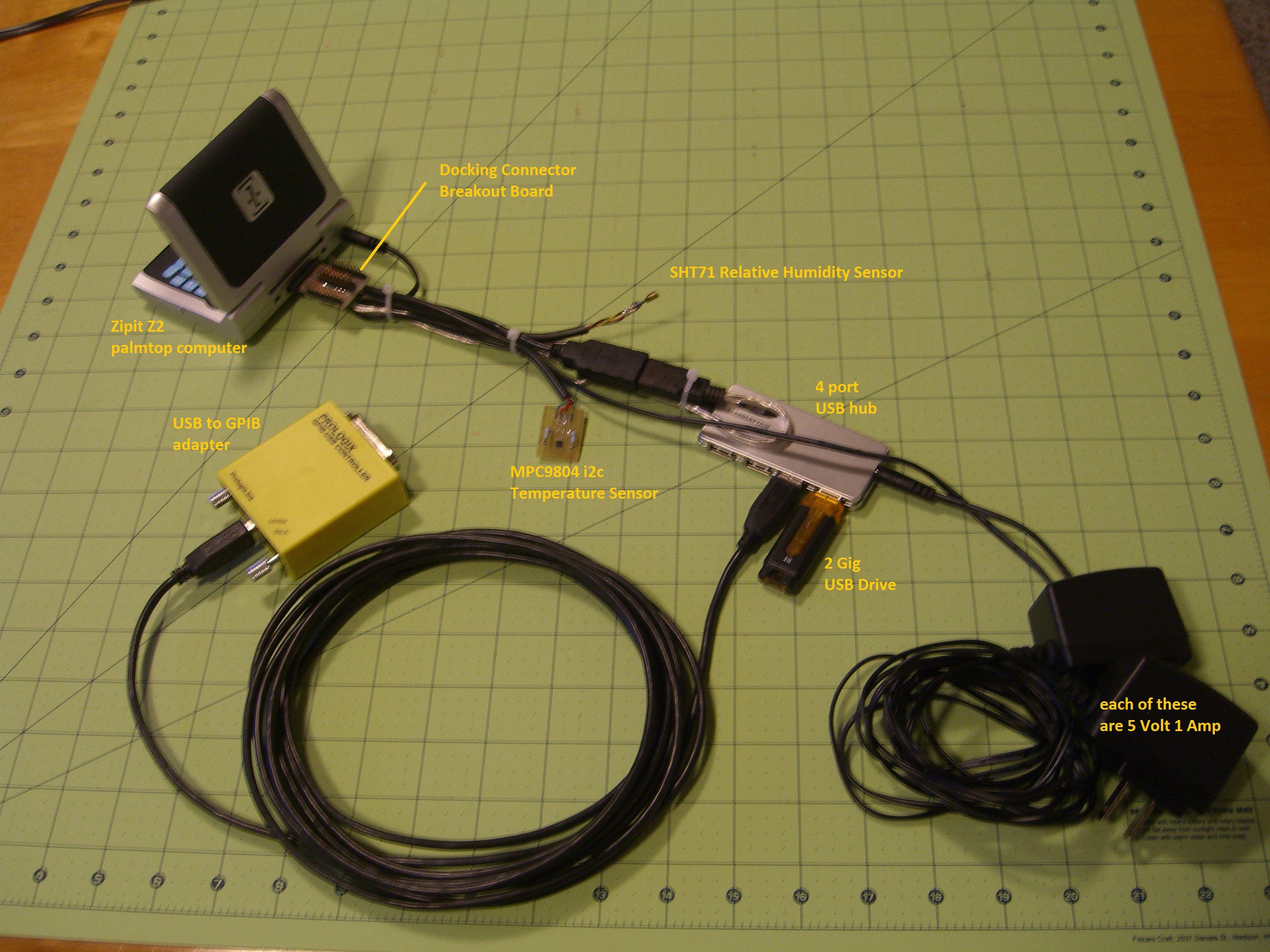
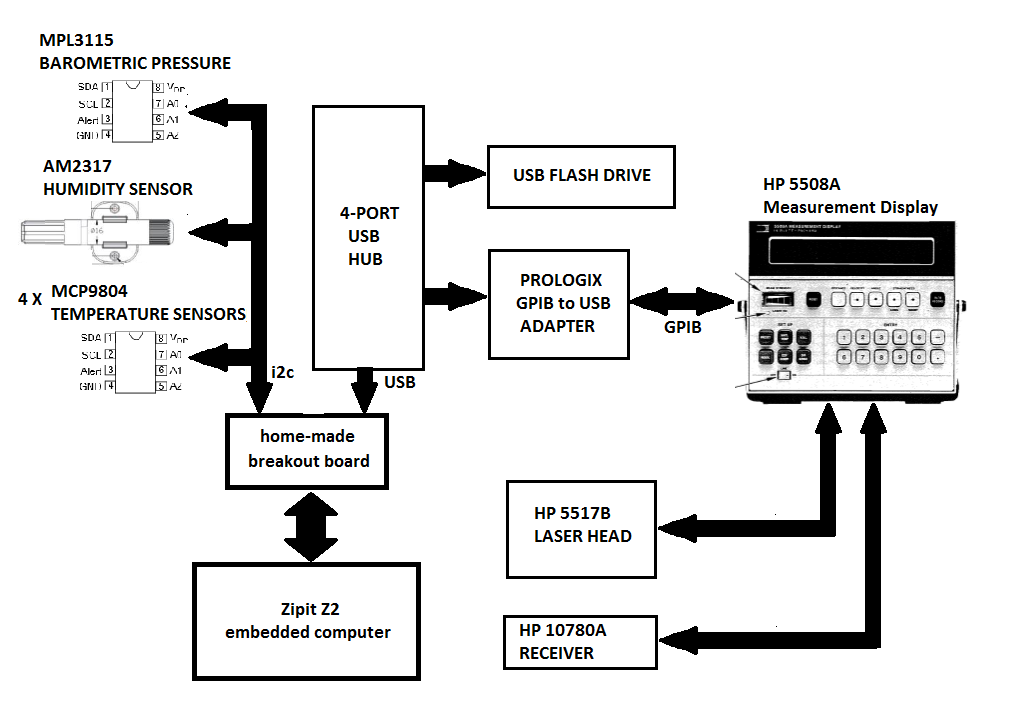
07/02/2014 at 08:47 • 0 commentsHere is a picture of how everything will be connected
![]()
The Zipit Z2 is a tiny clam shell computer. It was originally designed to be an messenger device for tweens. it is easy to reflash the internal memory with openWRT. I have been using a distribution which was put together and compiled by slug_ on a #zipit irc channel. The distribution was downloaded from here http://blog.engine12.com/?p=340
after installing configuring openWRT, I installed i2c_tools so that I can operate the environmental sensors.
![]()
The Zipit will be used for the following purposes;
- Controlling the i2c sensors
- An HTML server will provide web page control of the interferometer system
- Communicate with the HP 5508A measurement display
- Provide a means to calibrate the sensors
- Datalog sensor data and GPIB communication data.
![]()
I made a breakout board for the docking connector of the Zipit Z2. The docking connector is 50 pin connector with impossibly small 0.5 mm wide connections separated by the same distance. I brought each of the connections out to 0.1 inch pins. From these connections I wired four conductor cables to the i2c sensors and the USB hub.
![]()
I am easily able to communicate with the HP 5508A by using a Prologix USB to GPIB adapter. The adapter uses a FTDI USB to serial chip which is automatically recognized by openWRT. a file //dev/ttyUSB0 is automatically created. I then simply echo and cat with the //dev/ttyUSB0 sending plain text GPIB commands and plain text responses.
![]()
The i2c sensors include three MCP9804 temperature sensors which will be used to measure the temperature of the object being measured. A fourth MCP9804 will measure the air temperature, while a AN2317 humidity sensor will be used along with a MPL3115 barometer will be used to measure the speed of light.
-
measuring thermal expansion
07/01/2014 at 17:12 • 0 commentsAnother significant source of error in length measurement is from the effect of temperature on the length of an object. Materials have a physical property known as the Coefficient of Thermal Expansion. This property numerically describes the amount of length an object will change of a given change in temperature.
The Coefficient of Thermal Expansion value can be programmed into the 5508A either from the
- Manually typed in from the front keys on the 5508A
- Programmed in from the GPIB interface on the 5508A
The temperature of the object being measured is then input from either
- Manually typed in from the front keys on the 5508A
- Electronically input from sensors attached to dedicated rear connections
- Programmed in from the GPIB interface on the 5508A
The temperature input and the Coefficient of Thermal Expansion are then used in an equation to provide a measurement display of how long the measured object will be if it were at a standardized temperature of 20°C (or 68°F). This consequently allows the operation of the interferometer at different temperatures.
![]()
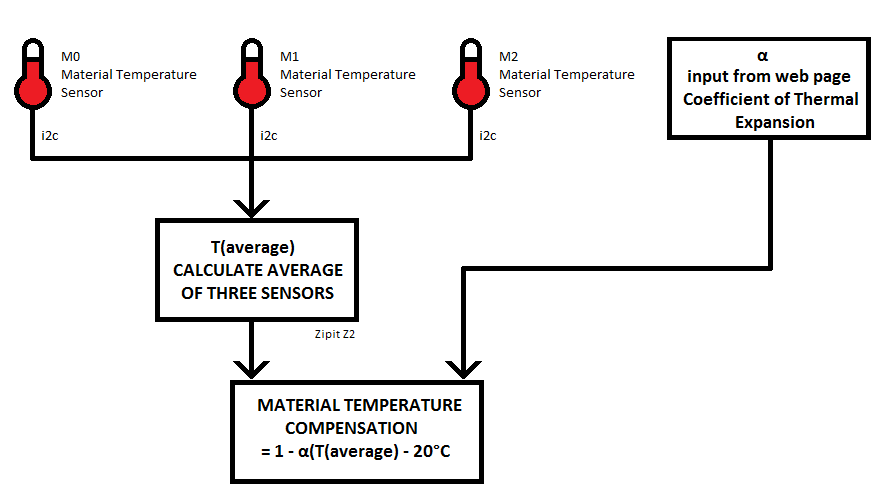
The 5508A is originally intended to have up to three electronic sensors attached to the rear connections.The 5508A would then calculate the average of the three sensors.Apparently it is smart enough to know how many sensors are attached and takes the average value of the sensors.
Optionally the average value can be typed in from the front key pad or the average value of some external sensors can be programmed through the GPIB port.For this project I will be using a Zipit Z2 embedded minicomputer to control a set of i2c temperature sensors.The sensors eventually will be built into V-Block clamps that will be used to hold the object being measured in a consistent manner.The temperature will hopefully represent the real temperature of the object being measured.The i2c temperature sensors values will be averaged by a compiled program in the Zipit Z2, just as the wavelength compensation was described in my previous post.The average temperature value will then be transmitted to the HP 5508A through a USB to GPIB adapter which will provide communications between Zipit Z2 and the HP 5508A.Finally an HTML server in the Zipit will provide a way for a user to input the Coefficient of thermal Expansion value.
-
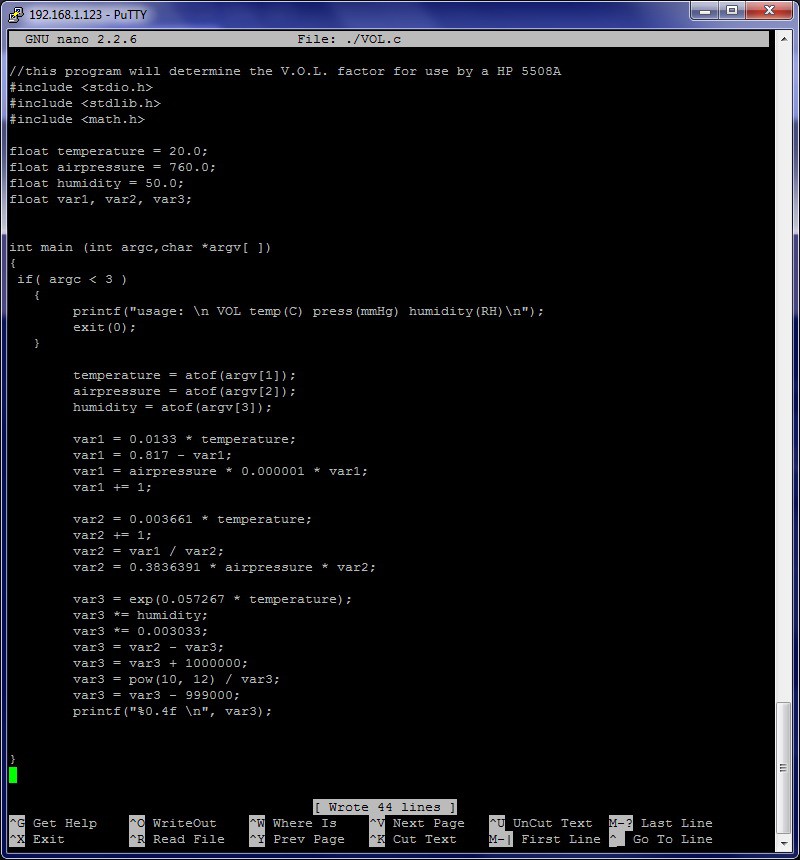
Edlen's equation in c
07/01/2014 at 07:10 • 0 commentsI wrote the following program to follow the arithmetic worked out in Hewlett Packard Laser Measurement User's Guide Manual Part Number: 05528-90022 revision date March 1992 page 19-6.
![]()
repurposed luminiferous aether detector
over the last few years, i've build up a functional laser interferometer. now i want to use it to accurately measure distance.