Laio Athos Nevar Fonseca
Laio Athos Nevar Fonseca-
First points \o/
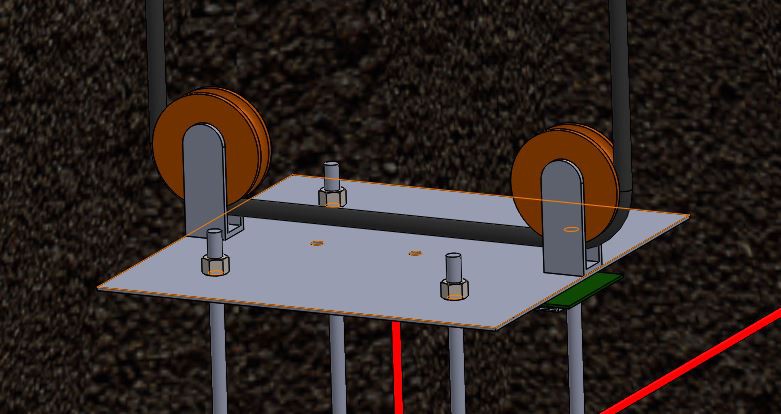
04/25/2018 at 05:18 • 0 commentsToday I'm writing the code and testing the integration of the Sharp sensor with the Stepper motor. Apparently, that's ok. I need to do more testing.
The conection it's simple and I don't want to keep a lot of wires now.
I need to verify the basic assembly.
![]()
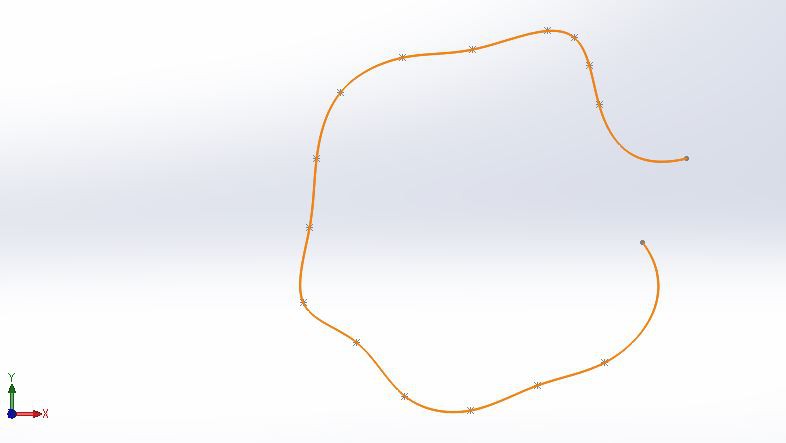
With this simple assembly, I get the first turn of points. And I inserted into a CAD program.
![]()
I'm devoting my time thinking about the concept of Taipei and how I'm going to solve the pendulum in my project.
-
THE PENDULUM PROBLEM AND THE TAIPEI 101 TOWER SOLUTION
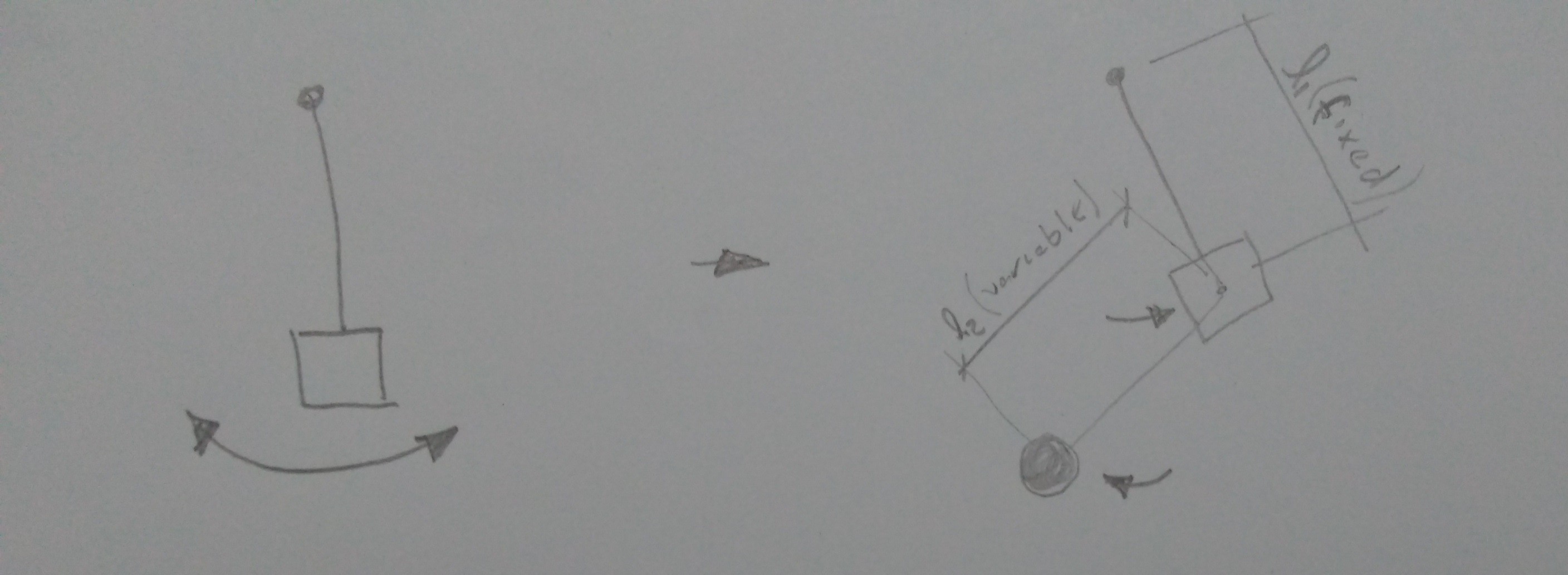
04/22/2018 at 22:59 • 0 commentsSo, when I tell to anyone about m project, they ask me about the pendulum and how I plan to solve it. Really? At fisrt I was not worried about this problem, I calculated all centers of gravity(CG), and it's ok. But now, when I think about the vibration and others interferences.... yes, I will solve this.
I begin with the idea of a pendulum and his lenght "L", and I considered to use a dual pendulum to make a opposite force. But I'm don't convinced that's will run well.
![]()
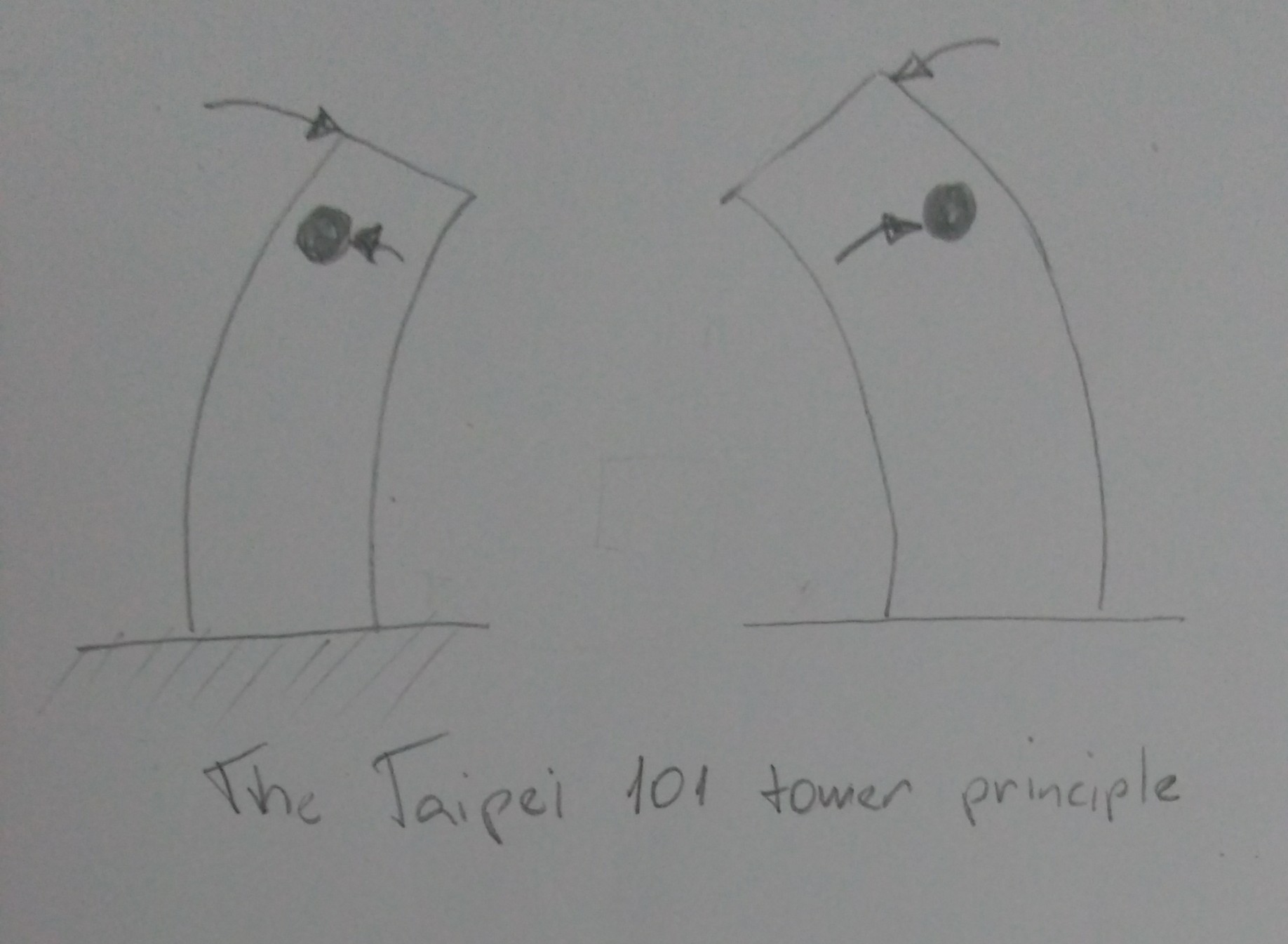
With this problem, I remembered of the Taipei 101 tower and his anti seismic system.
I have the same problem but upside down.
![]()
Now, I have a concept to how to do this.
-
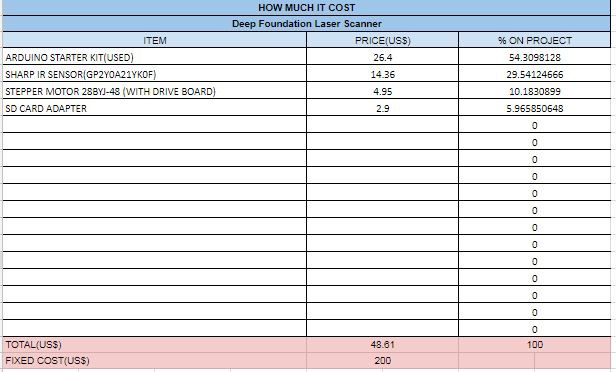
HOW MUCH IT COST(?)
04/22/2018 at 22:18 • 0 commentsOk, it's a important point: The price.
I'm fix the cost on US$200.00 today, the most heaviest participation on project is the arduino starter kit. I found it from a man that bought this kit but can't spent time to do anything arround the arduino. And the other items, I bought as new.
![]()
-
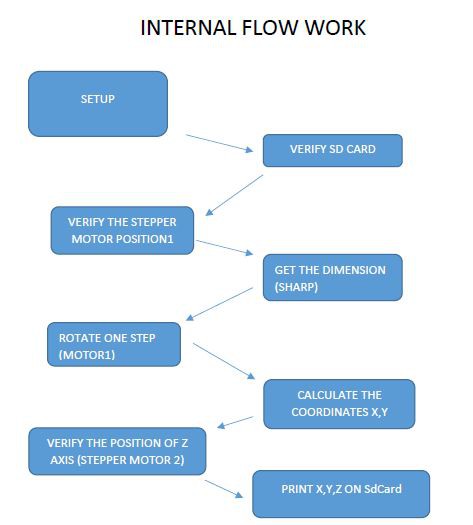
INTERNAL FLOW WORK
04/22/2018 at 21:26 • 0 commentsThat's the basic internal flow work.
It describes how I'm planning that it runs.
that's the first version of the flow work. I think that is not the last version of the flow work.
![]()
-
3D modelling and more problems in Z axis or solutions(maybe)
04/20/2018 at 04:49 • 0 commentsToday I'm modeling the basic 3D and making some tests with the Sharp sensor. My biggest doubt was about the deflection of the IR beam and now, its ok. It's a relief.
Now I'm working on the system that will make on Z axis movimentation.
Maybe I use a fixed point of the cable on level 0m and a reel to variate the elevation. To get this data, I can use a servo motor and convert his turns to Z axis distance.
![]()
-
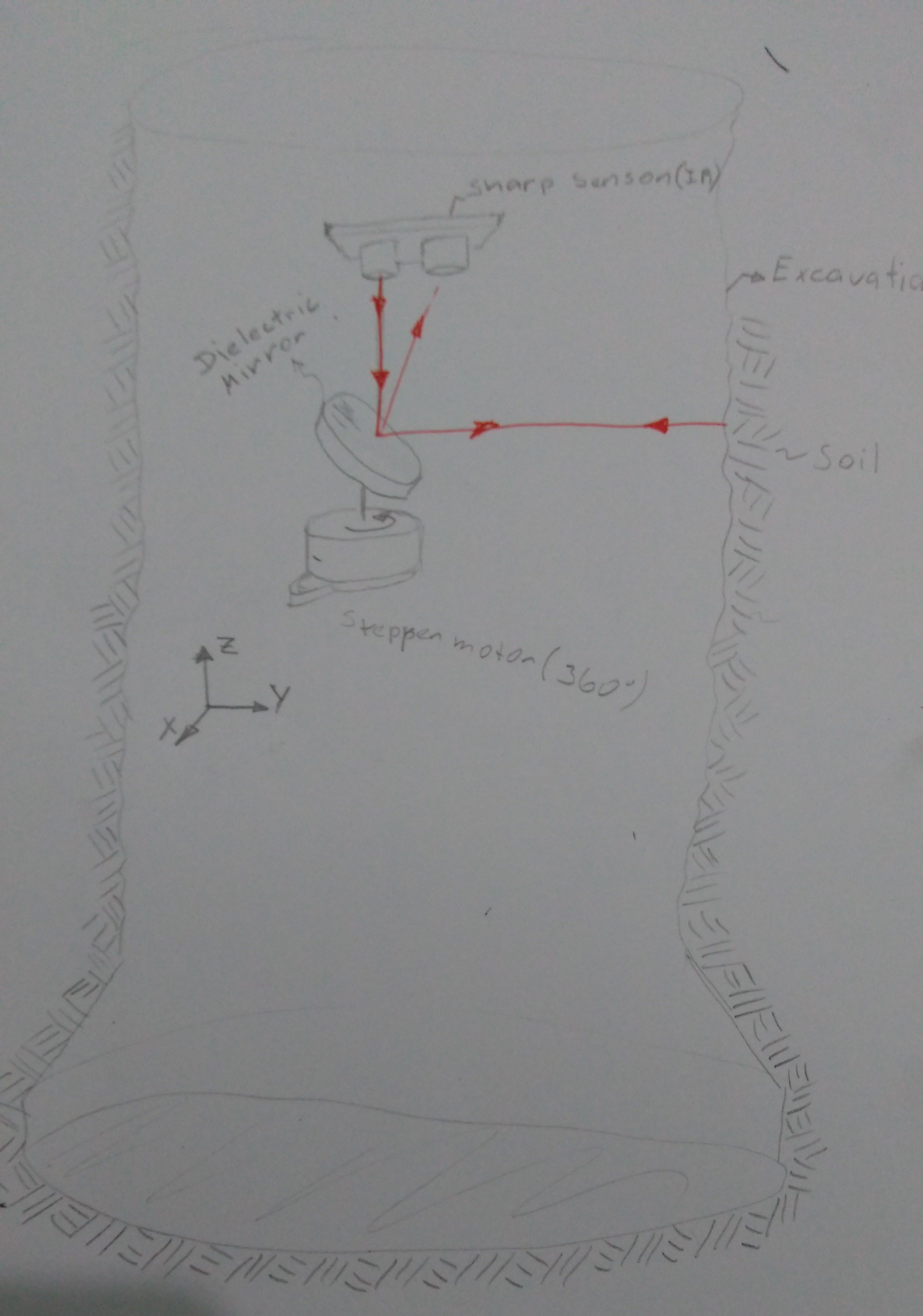
Definition about the main parts in internal work flow
04/19/2018 at 04:01 • 0 commentsYeap, it's on paper!
Here I show the main parts about the internal work flow.
The original idea was using a Kinnect sensor(Xbox 360) to make a point cloud but it's demmand a hard processing time. So, to do the simple, I changed this to a own laser scanner.
How it's run:
The IR(Sharp sensor) beam will be reflected on a rotating(stepper motor) dielectric mirror. The result is a meassure X,Y on 360º.Therefore, I have to solve the problema in Z axis. Maybe I use a servo motor or other stepper motor to control up and down on the hole.
![]()
-
Definition about the operation flow
04/19/2018 at 03:17 • 0 commentsIt's a simple definition about how I planning the steps to the operation on the data extraction. It's the main task: plan "HOW" and "WHAT" I am trying to do. The result is shown on the image below:
![]()
Deep Foundation Laser Scanner
This project try get the dimensions about a deep foundation without a danger to the responsible for the excavation survey.