panovvv
panovvv-
Dome modeling update
06/04/2018 at 10:01 • 0 comments![]()
![]()
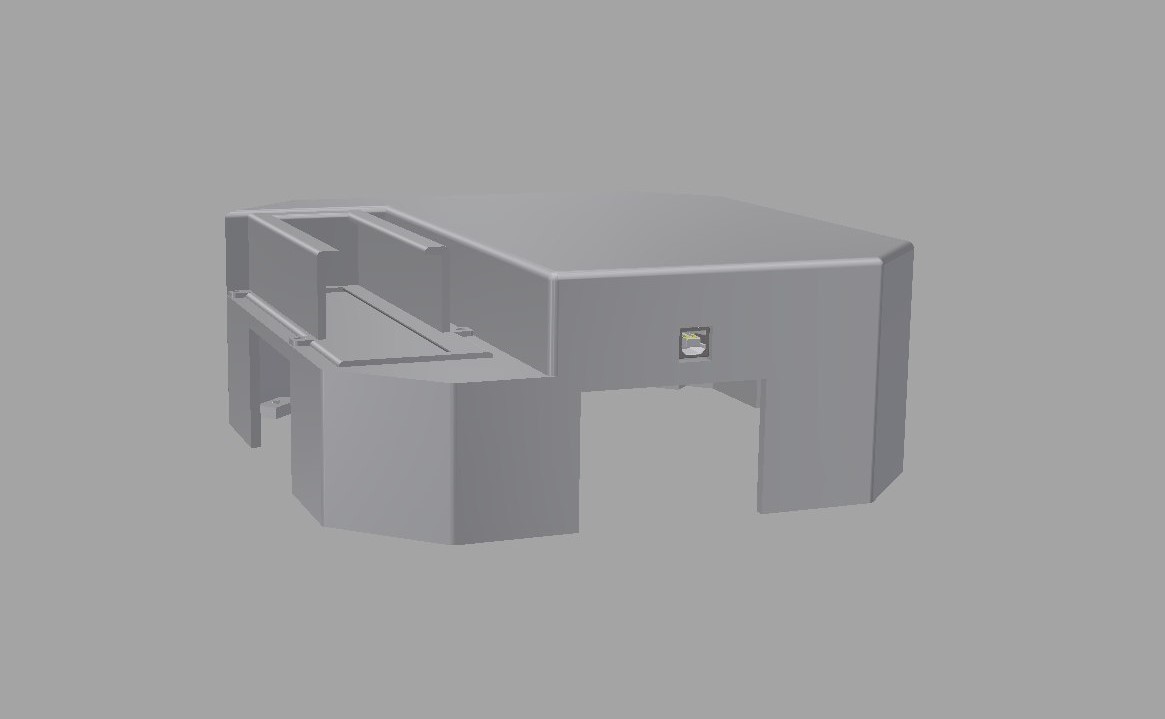
Here's the dome that's supposed to cover the aluminum plate and house the whole assembly. The thing is, it's way too big for printing. Battery holder can be (and already is) printed separately, but separating the dome itself into printable parts is still work in progress.
-
Deadline
06/04/2018 at 06:34 • 0 commentsWith Hackaday Prize 2k18 deadline approaching, I'd like to recap what's been done during the month:
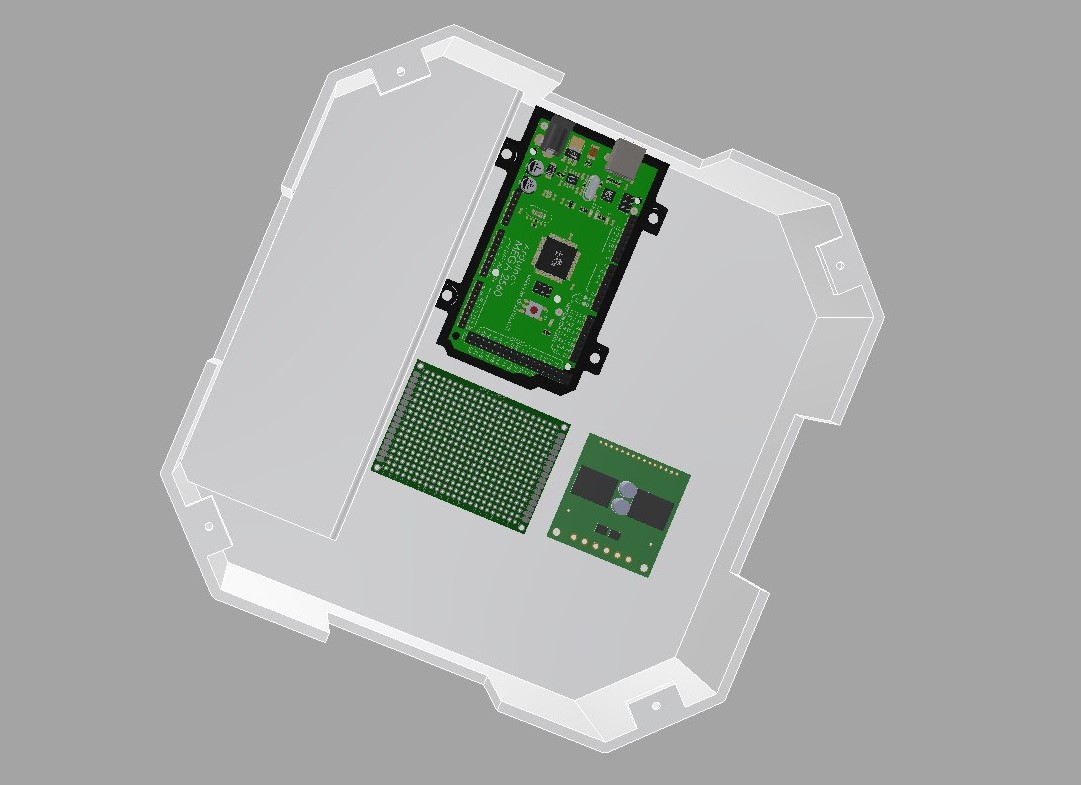
- Mechanics: base modeling is 90% finished. The aluminum base has been cut out, and small details like motor holders are already printed and fitted, but we still haven't figured out how to print the huge plastic dome atop the aluminum base that's housing the electronics.
- Electronics: the schematics is ready, soldering is postponed until the dome is ready, so that the assembly and soldering may happen in-place.
- Programming: it's been decided to reuse the existing firmware to the max, so this base will be compatible with Linorobot.
What's left to do:
- Mechanics: somehow splitting the huge dome and printing it, assembling the base and screwing on the electronics.
- Electronics: soldering the whole thing together according to the schematics.
- Programming: appropriating Linorobot firmware to make use of Arduino Mega's pin change interrupts to read encoder signals (2 encoders can be used with already existing, normal interrupt-based encoder library) and different model of IMU.