Danny FR
Danny FR-
Control modes comparison
09/26/2018 at 19:07 • 0 commentsIn the following video you can see two available control modes in the Smart Motor Driver, the first one is direct pwm control. So the motor reacts immediately to any change made by the user. In the second one is PID control mode, here the controller calculates acceleration/desacceleration to achieve a better and safer control of the motor. The changes are not immediately but are better suited to prevent damages like flipped robots, stripped gears or even battery cut-outs due to overcurrent.
See by yourself the improvements, the best of all you don't have to do anything complicated thanks to SAMI capabilities.
-
Arduino library now available
09/20/2018 at 17:30 • 0 commentsToday the Arduino library for SAMI got approved and added to the library manager in the Arduino IDE. The project is moving forward to be successful, just a little bit more testing.
Tomorrow I will be receiving more motors and other stuff to build a new robot with 4 independent wheels. Using tracks was not a good idea, they have to much friction and turning with the robot precisely is almost impossible because the tracks slip on the floor. I also need to add a IMU in this case, but for my demonstration that is not valid. Robot must be capable of moving perfectly just by using the Smart Motor Driver.
![]()
-
Beta prototype ready
09/17/2018 at 19:59 • 0 commentsLast weekend I have been testing what it's seems to be the first fully working prototype and fixing some bugs. Now SAMI is alive and fully capable of what I promise. In the next weeks I am going to do more test and after I have confirmed everything is as it should be I will sell some units on Tindie for beta testers. I would like to hear your thoughts and how we can make it better.
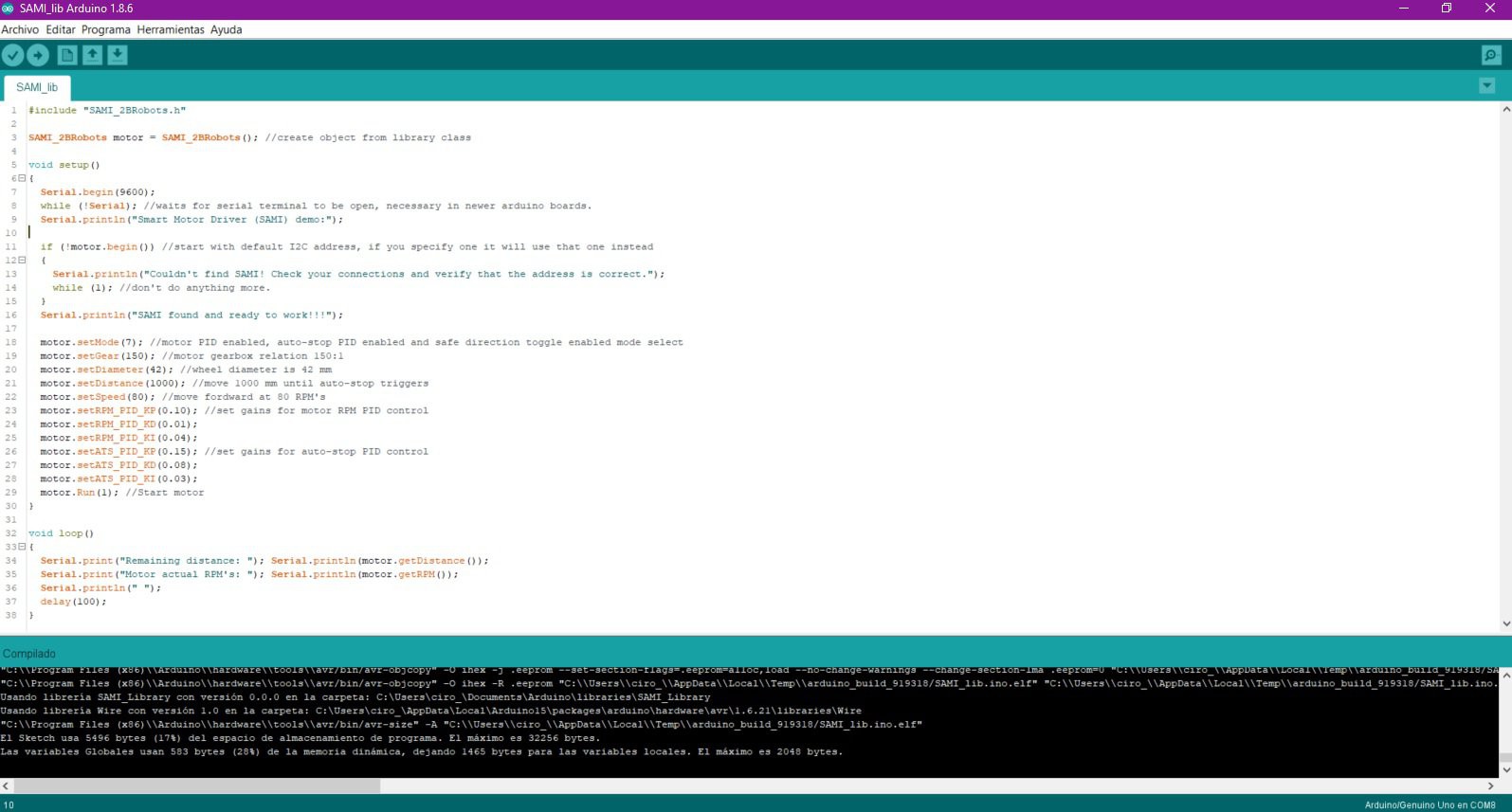
In the video I show SAMI - Smart Motor Driver moving 1 exact meter in a practically perfect straight line at exactly 80 RPM with just 10 lines of code(thanks to the Arduino library). You can connect everything in a couple of minutes and you can have up to 128 motors in the same I2C bus:
-
Releasing Arduino Library
09/09/2018 at 18:42 • 0 commentsGood news the Arduino library for SAMI is here, it is still on beta testing but it works. The Github link is now added to this project documentation and will be released on Arduino Library Manager in a few days after some more testing. Enjoy!!!!
![]()
-
Final module functions
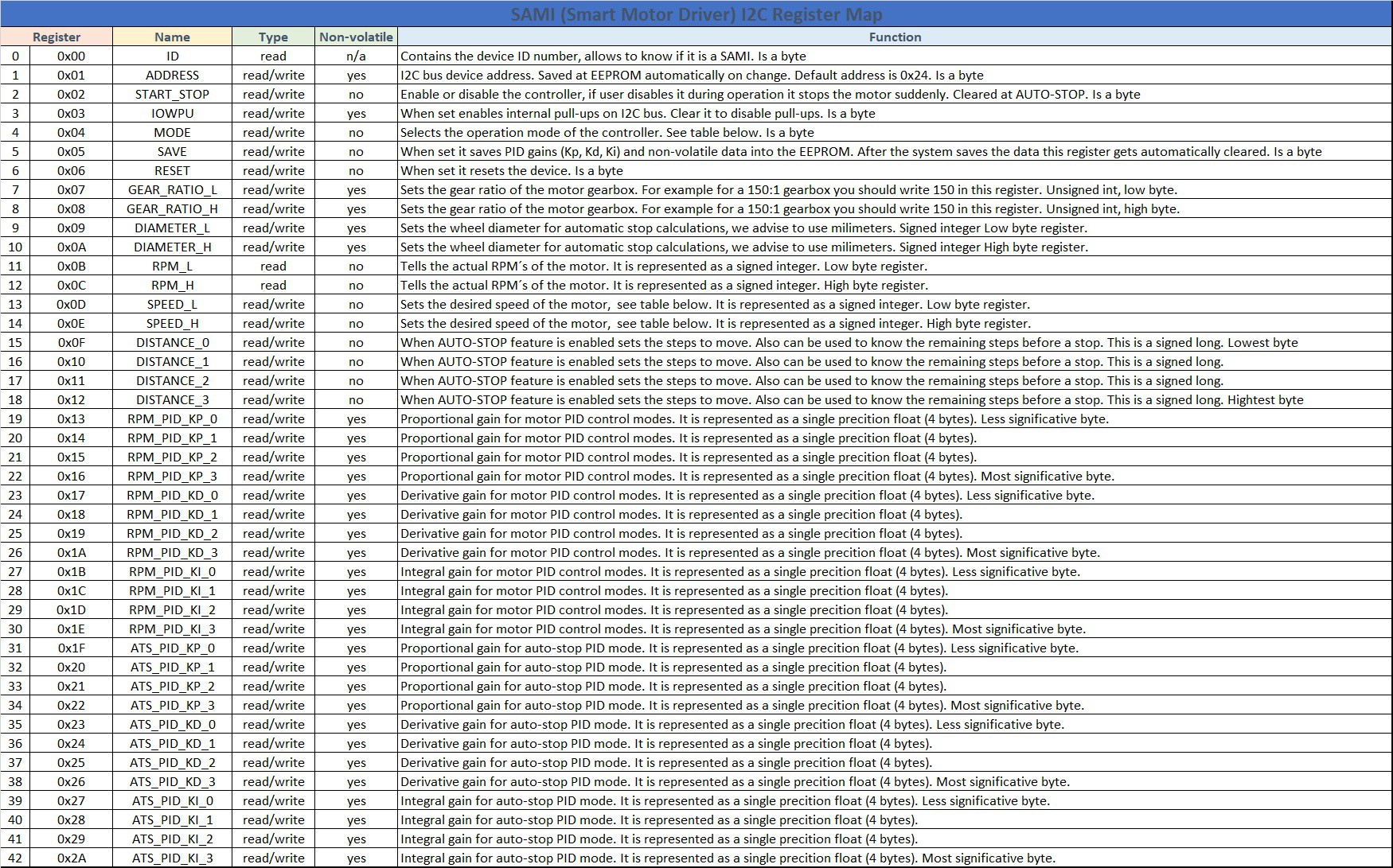
09/08/2018 at 20:00 • 0 commentsToday I have finally done analysing what functions will be the most popular and common in almost any application scenario. And i have got this, the I2C register map listing all possible configurations and required parameters in SAMI:
![]()
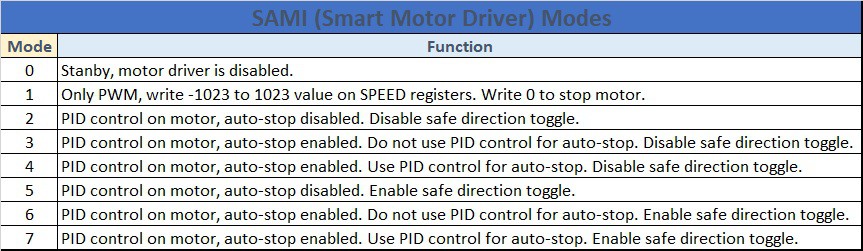
And also this are going to be the driving modes:
![]()
Of course there will an Arduino and Python libraries for easy using of SAMI. Also a full datasheet will be released when testing phase is done. Please be patient, I am the single person working on this in my free time.
Next week I will show you the finished project, so keep tuned in!!!
Thanks :) -
Putting all code together
09/05/2018 at 00:55 • 0 commentsFor some time I have been experimenting a lot with I2C communications and PID motor control, however I was running this experiments by separate. But now it's time both worlds meet and live together. Today I proudly present the prototype working all together as promised.
There is still things to do and a few tweaks before I can say it's done, but I am almost there. Just a little bit more of patience. In the next video I have attached two SAMI's for showing you that it works and also ask your opinion about the two different ways to do a direction toggle. Which one do you think is better? Please leave a comment with your opinion.
Thanks.
-
Make your own SAMI!!!
08/20/2018 at 03:56 • 0 commentsHi, I want to share with you this video. In it I explain how to assemble the pcb, is not a high quality video but you will get the idea.
PD: sorry for the bad pronunciation and some drafting errors, I got nervous :/
-
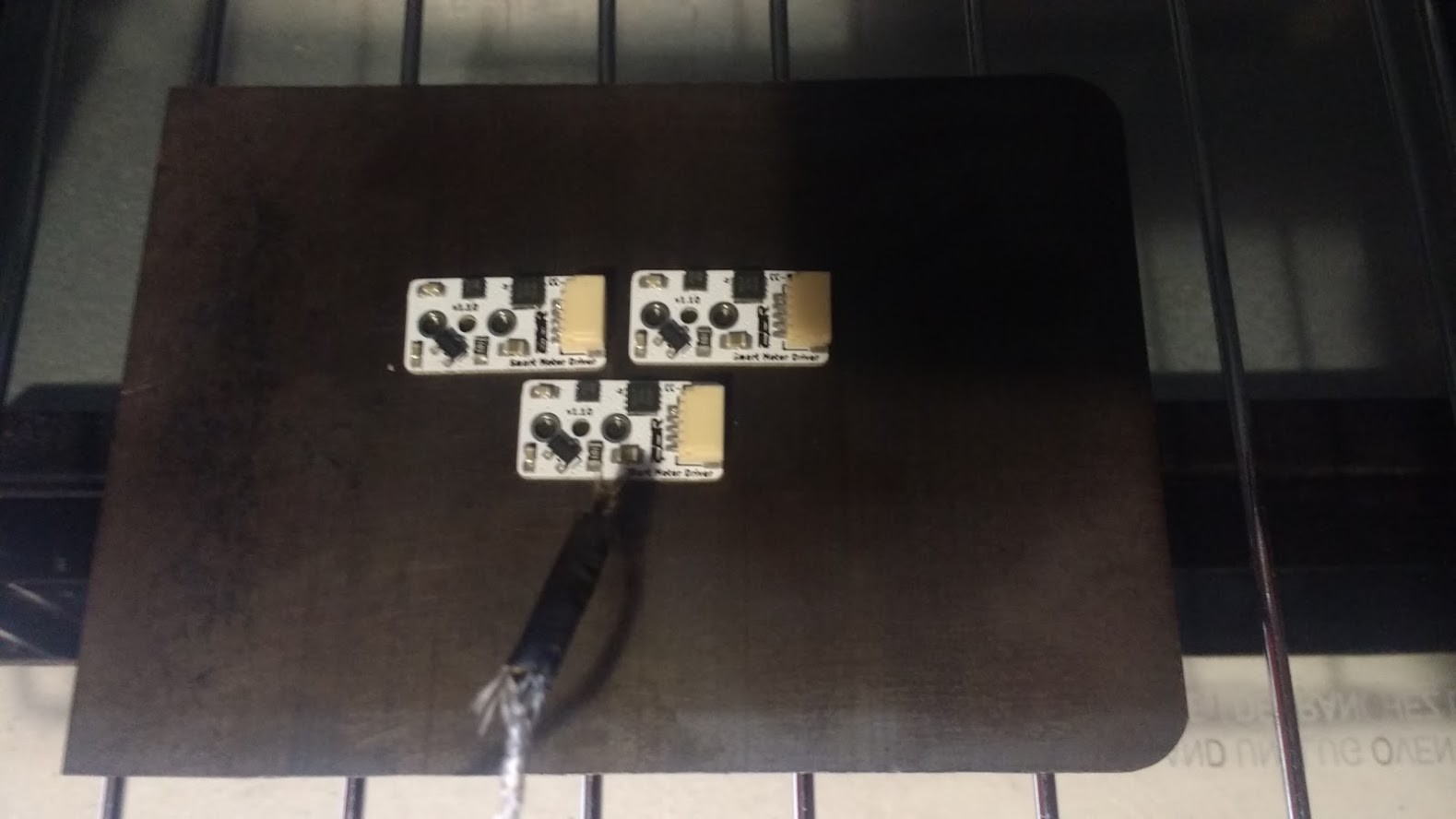
More components, more boards
08/14/2018 at 22:30 • 0 commentsFinally after almost two months waiting for the parts they have arrived. So I am making more boards with the PIC 12F1840 update. So no more space limitations and I can continue developing the software. Also I am working in a video showing the assembly process for the curious!!!
![]()
![]()
![]()
![]()
-
Thinking about manufacuring
08/05/2018 at 22:43 • 0 commentsWell, one of the purposes of this project is to make it available to the public. However it may be so difficult to ask everybody to make their own board. Because some parts are pretty small and require a little bit of experience doing SMD soldering before trying to make this boards.
It will be a waste if I let that happen, I want that everyone can use this in their robots and all kinds of projects. So they can benefit from the advanced control available for motors in this board put right in their hands in an easy to use and practical way.
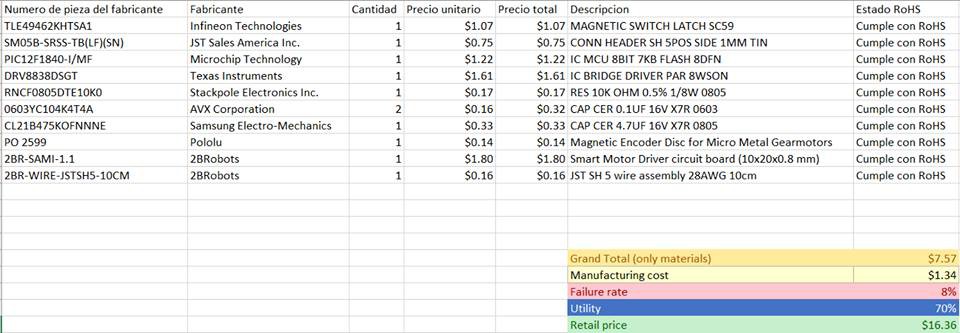
I make a quotation on Digikey and some other providers in order to calculate the selling price of this. In the table below you can see the price for each part and some other costs. However it will be some more cost hidden, but for now this will give us an idea.
![]()
This prices are only for a small batch of 25 boards, the cost is per board. So $16.36 selling price seems cheap enough, but surely it can be improved building at least 1000 boards!!!
I will need to do my best for making it as cheap as possible and make it available for everyone :)
-
Demo robot finish
08/02/2018 at 22:35 • 0 commentsIn the past log I started working on a robot that would be used for my video and also demo the Smart Motor Driver (SAMI) in a real life application. Here are the results :)
![]()
I am using a Pololu track set, a custom made laser cut chassis an a bit of cardboard.
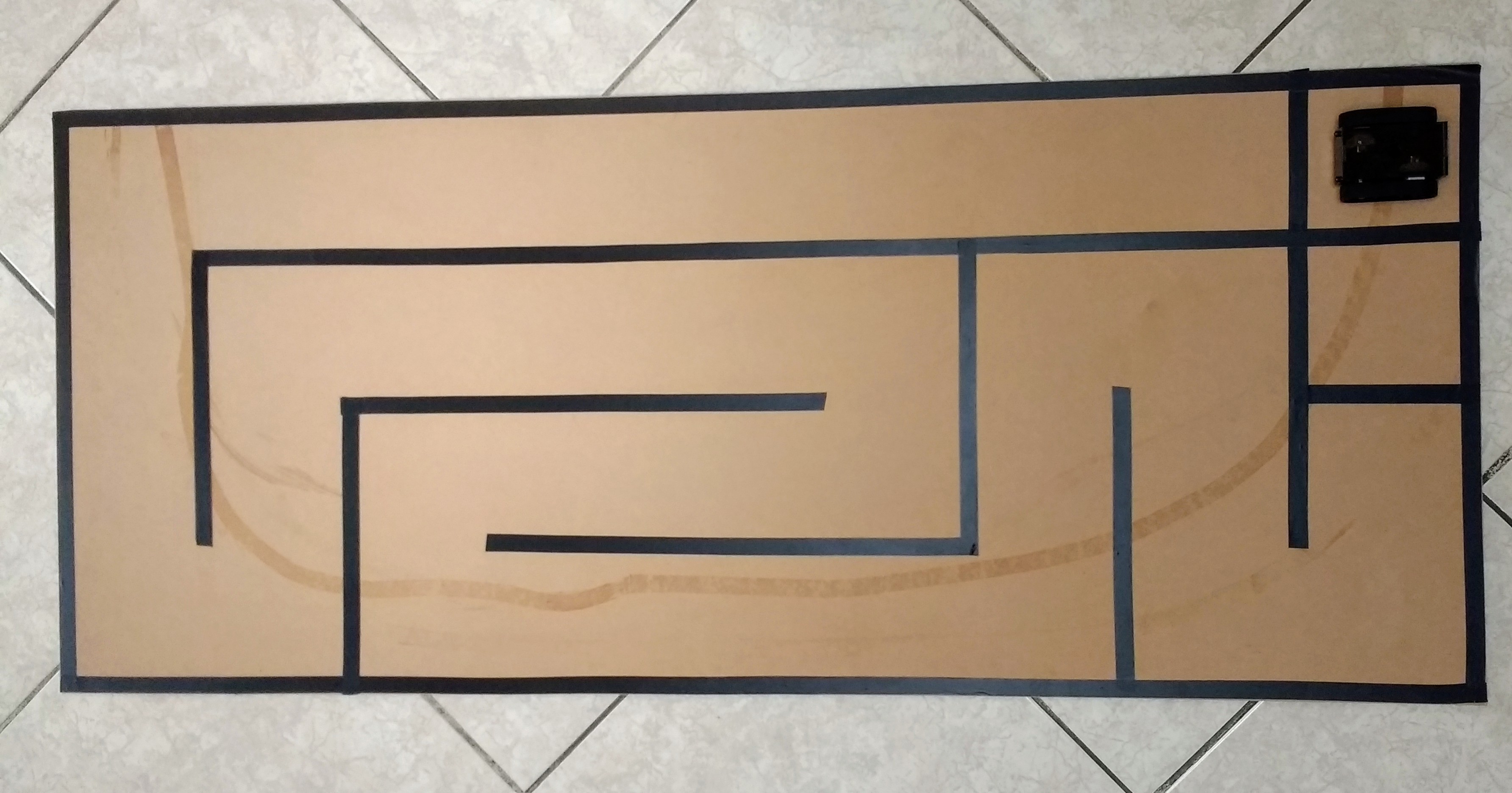
The robot doesn't have any sensor or communication with the outside world. It would navigate a maze completely using pre-programmed distances on the smart motor drivers.
This will be the maze for my demonstration:
![]()
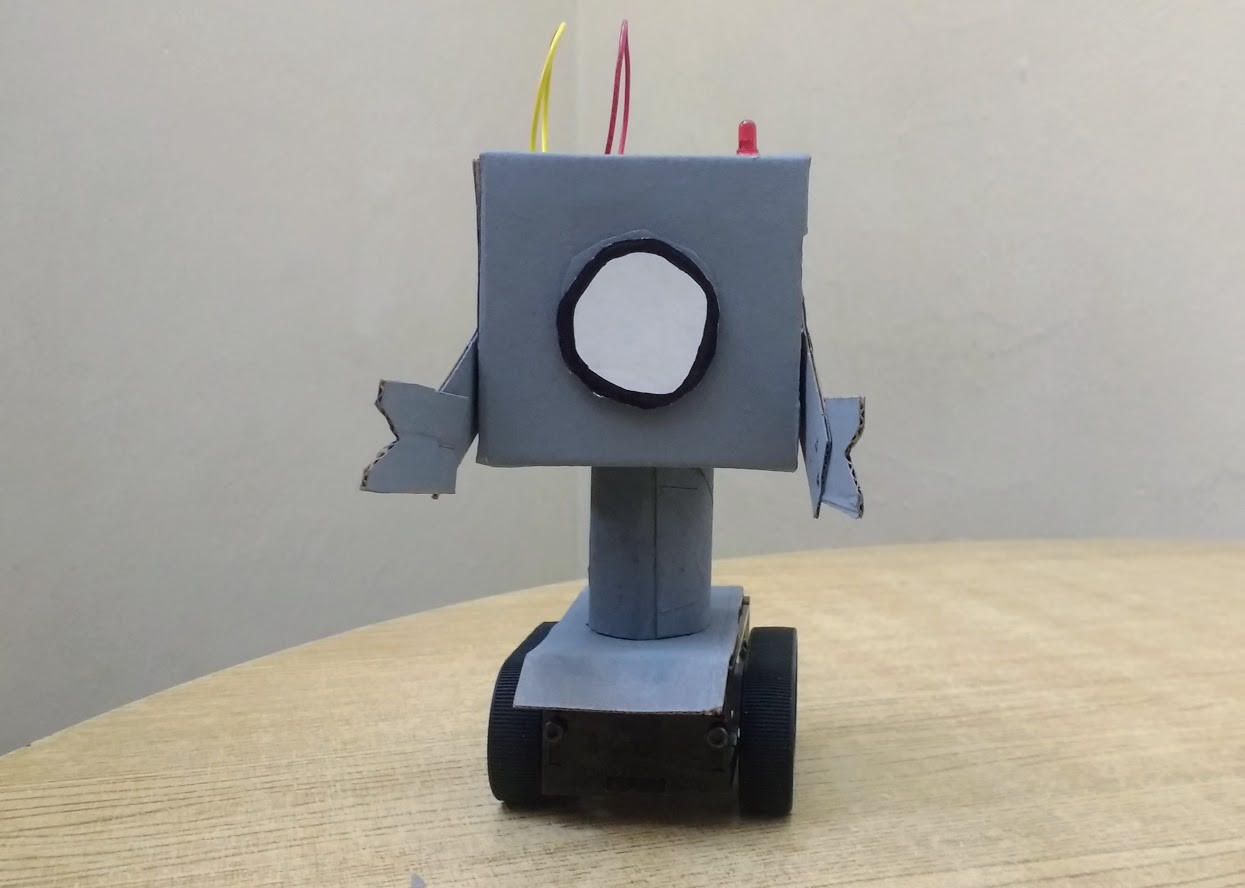
Edit: after a few tests I realised that tracks where slipping on the course surface and is almost impossible to correct that unless I use a IMU sensor. So I decided to make a new robot for the demos:
![]()
This idea will return later using an IMU to complement SAMI.
Smart Motor Driver for Robotics
This motor driver is able to control a motor using PID by I2C. Taking precise control of a motor have never been so easy.