-
Moving on
03/30/2019 at 18:52 • 0 commentsThis project has served me well and I've probably taken it as far as it can go in it's current form. I've hacked it countless times modifying the firmware, testing thermal management, different output filter configurations, etc.
I'm hoping it's work will live on in a redesign. Boards are at the fab and once assembled I'll start posting under a new project.
-
Thermal Evaluation
12/01/2018 at 20:03 • 0 commentsAfter some diversions on other work I'm finally getting around to working on the TS350's redesign again. I did a poor job on the original thermal model and didn't account for the increase in Rds(on) of the MOSFETs (with temperature) and, more importantly, the coupling of adjacent components. The result was that the inverter section would overheat (shutdown) at continuous operation much above a 300W output.
One of my enlightenments after some additional book work is the need for thermal imaging to get a true picture of what's going on; my spot IR thermometer & thermocouples don't cut it. I picked up a FLIR One Pro. Because it uses a smartphone for display & processing it's half the cost of an entry level professional, self-contained, IR camera.
![]()
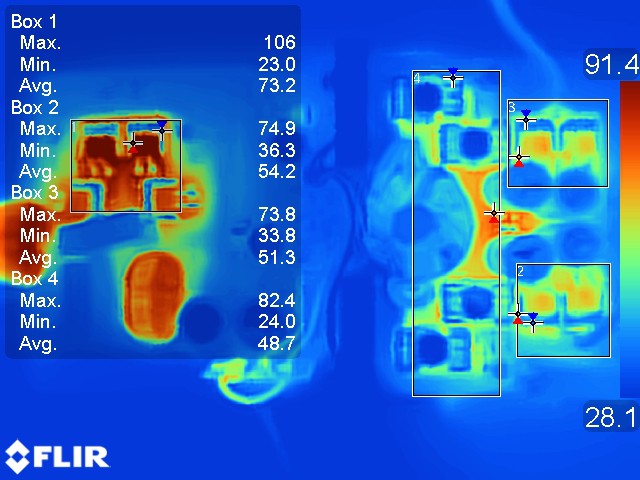
It's easy to use and with the companion FLIR Tools application enables you to quickly analyze image data. Here's an image of the TS350 powering a 300W load continuous. The temperature boxes were added after the image was taken with the Tools appl.
The camera paid for itself on the first use. Revelations:
- Box 1: the high-side sine switches run much hotter than the low-side, even though they are on only half-time (vs. the low side on ~ 85% of full sine cycle). Why? Because the high side experience high voltage & current switching stress (at turn on there is a +170V gradient D-S) whereas the low side switches under near 0V conditions. A secondary contributor is the higher thermal coupling coefficient of the high-side transistors since adjacent to one another. Duh.
- Boxes 2 & 3: my model over-estimated the temperature rise of the relay MOSFETs. I didn't install heat sinks and they are running close to my model's predicted temperatures with heat sinks. Also note that the temperatures between the +/- poles are symmetrical (good).
- Box 4: thermally speaking the inverter MOSFETs are my problem child but at first glance the image doesn't reflect that. The hot spot in the box are the current sense resistors and, while not a surprise, is a reminder to be careful with their location and coupling effects to & from them. Heat sinks are installed on the switches and they are quite cool. But most of the board area around them is copper and the image shows those temps >70C. My conclusion is that the heat sinks do a poor job of conducting heat from the board and that leads to high case / junction temperatures. As with the sine MOSFETs, the coupling effect doesn't help.
My take-away is that SMD heat-sinks are okay when dealing with only a few watts for a single device but for higher powers & multiple devices they are inadequate. I suspect they can also present a significant near-field capacitive coupling problem with few remediation options other than a shielded enclosure.
So, for the redesign I am creating a linear superposition model that will account for coupling effects. To do this requires that I know the coupling coefficients and these must be measured from a thermally representative model of the design. All of this implies that I need to make decisions on the board layout, transistor mounting, heat sinks, etc.
I'm definitely gong with TO220 MOSFETs for the inverter with the goal of a more compact footprint and improved thermal efficiency. The relay will remain SMD but will probably offload to a separate power board that contains the power connections, user interface, etc., and because of this probably won't need heat sinking. I haven't decided on the sine section yet. From an EMI perspective it needs lots of improvement and much of it will revolve around reducing the size of current loops.
Lots to do!
-
Current Monitoring and Control
10/19/2018 at 19:43 • 0 commentsObjective. A design goal for TS350 was to leverage a single current sense circuit that could provide both pulse-pulse, or Safe Operating Area (SOA), protection and average / RMS current for power management. Cost and space were key drivers. I prefer to use current transformers because of their inherent low noise, galvanic isolation, and undistorted output, but in this design they don’t support the objectives. First, they are relatively large. More importantly, using a single CT for both sides of the bridge with a high fixed duty cycle won’t provide sufficient time to reset the core without flyback voltages in excess of 200V. To avoid this I’d need to use two and that would require additional downstream circuitry.
Current Sense Design. A high-side sense resistor and differential amplifier are used for current sensing. Compact and cheap. The trade-off is a not so clean signal that requires downstream conditioning. I opted for high side sensing to avoid / reduce the incidence of problems associated with COM below ground for the gate driver.
Reference the schematics posted to the project to follow this description. R307 & R308 are paralleled to form the sense resistor. Their paralleled value of 1.5mΩ produces a differential voltage of 1.5mV/A. U302 is a TI OPA197 rail-rail, high speed Op Amp. R316 sets 10x gain for an output of 15mV/A and, Q305 level shifts (removes the INV_(+) supply voltage) the output for direct processing by the MCU, U101. R311 & R312 provide current limiting and in conjunction with D302 & D303 protect the Op Amp from voltage spikes. C314 & C317 provide local bulk capacitance and decoupling. Note that the supply voltage for the Op Amp is the direct input voltage and not the inverter auxiliary supply (VCC_INV). This is necessary for it to function - it’s inputs can’t be at higher voltages than its supply. This will be true for the redesign as well.
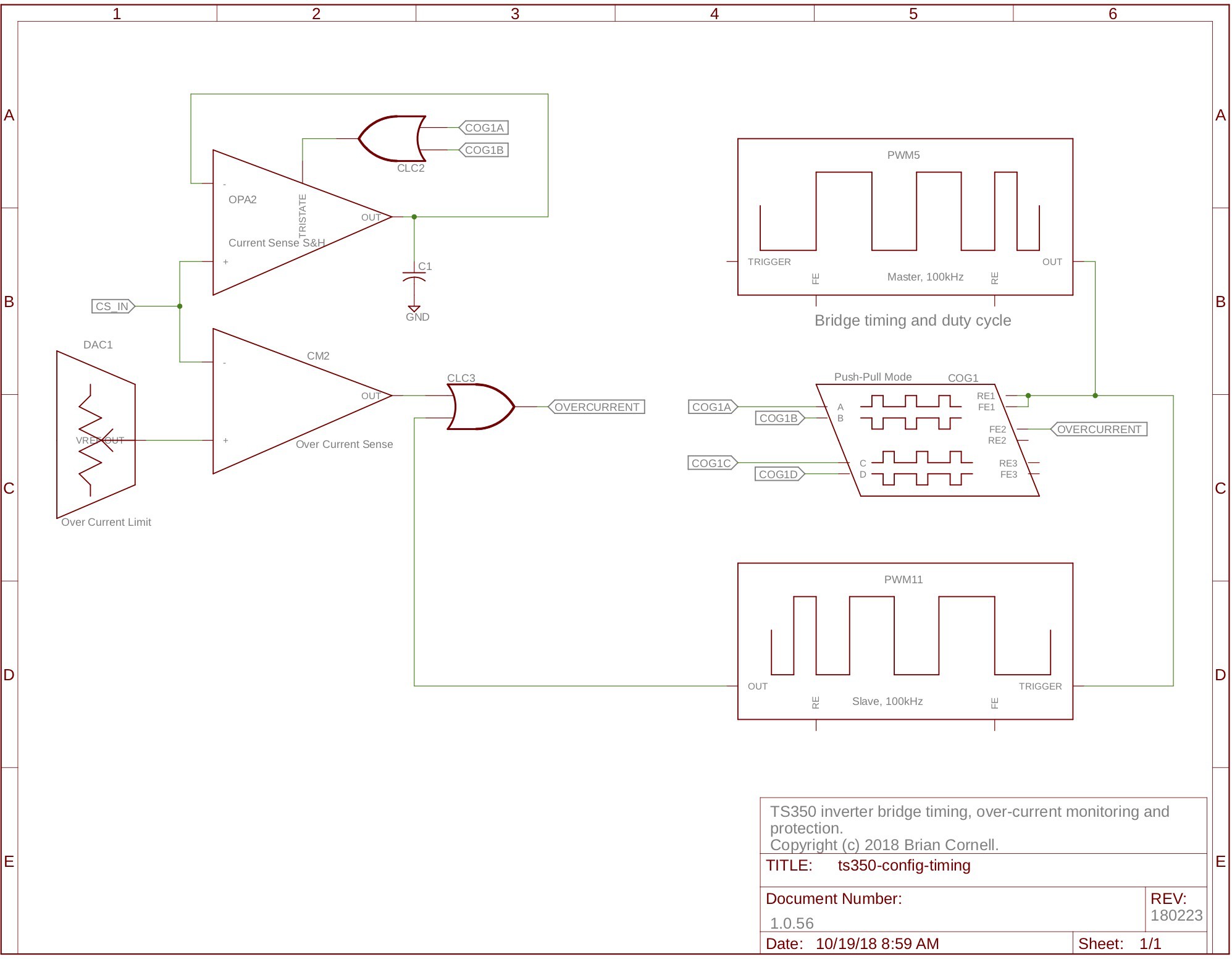
SOA Protection. The image below depicts the MCU’s peripheral configuration that performs both SOA and current averaging. Comparator CM2 is responsible for SOA protection. It’s positive input is connected to voltage reference DAC1 to define the over-current limit (in the prototype the limit is set to 140A). The negative input is connected to the external current sense circuit’s output. Ideally CM2’s output would connect directly to COG1 to drive a Falling Event (FE) input to terminate the drive pulse but it was previously mentioned that signal conditioning is required.
![]()
In this figure channel one is the output of the current sense circuit with a peak current of 48A. The ideal waveform would be the ‘ramp on a step’ (trapezoid) with no +/- spikes. The curved leading edge is due to the rise time of the Op Amp. Some of the positive spike at pulse termination is due to probe parasitics (as is the ring at pulse start) but much of the negative spike at pulse start is real. This created problems that the COG’s native blanking feature couldn’t handle (the MCU would reset). The redesign will incorporate a protection diode across the sense input to ground but even that may not be sufficient given the pulse amplitude.
![]()
A more flexible blanking circuit was fashioned using MCU peripherals CLC3 and PWM11. The PWM is slaved to the master, PWM5, and set to the same frequency. PWM11’s duty cycle defines the blanking time. CLC3 will only allow a FE outside of the blanking time. It is possible for a FE to occur at the end of the DC but that is non-consequential since the master PWM has already terminated the pulse with a FE.
The firmware protects the inverter from continuous over-current events. When running, COG1’s duty cycle is sampled on each pass of the run loop. A simple PID filter sets the limit on time & rate (integration is somewhat variable based on loop timing) of over-current events and when exceeded the inverter is stopped.
This design is quite effective and has demonstrated ability to protect the bridge with the transformer secondary shorted. I have not tested it’s ability to protect against a dead short on the primary but I’d expect that the bridge would fail since this circuit can’t respond fast enough (it relies on the protection that the transformer’s inductance affords - the inability for current to change instantaneously).
Averaged Current & Power. MCU peripherals OPA2 (Op Amp) and CLC2 form a sample & hold circuit. OPA2 is configured as a voltage follower with its inverting input connected to the current sense circuit’s output. A nice feature of these Op Amps is the ability to tristate their output. CLC2 drives the tristate control. It’s inputs are connected to the high side gate drive of each side of the bridge. Hence, OPA2’s output is only active when the bridge is being driven. The voltage across C1 represents the average of the current sense signal and can be used to derive the RMS input current and power; and from this the output power can be estimated.
The run loop continuously samples the inverter’s input voltage and the voltage across C1. The current & input power are calculated using the average of several samples. In the prototype firmware a fixed adjustment factor is applied to the current sense value to compensate for the slope of the current sense signal; I might revisit this since the compensation isn’t linear over the load range. Like over-current, a similar PID filter is applied to limit power.
Performance. The prototype firmware only calculated input power since I knew that a revised design would alter the model. To test, an electronic DC load was used to load the inverter’s high voltage secondary instead of using an AC load for a few reasons. First, it’s more difficult to obtain a precise AC load with the equipment I have. Second, and more important, is that the current on most all AC loads will vary in amplitude which complicates the measurements. The DC load is precise. A hall effect current sensor, in series with the inverter’s DC power source, measured current, and it’s output was connected to a scope that calculated the RMS value of the signal. A DMM measured the voltage at the inverter’s relay supply connections (same measurement points as MCU’s measurement).
![]()
The grid shows how the TS350 did. The TS350 ‘D’ columns are the values taken from the console ‘monitor’ command. The measured voltages track well with those acquired by the controller. The efficiency isn’t great but trends as expected. Interestingly the delta current / power curves have the same shape. I expected the deltas to remain constant, or increase as they do at the 306W / 365W loads. I suspect it’s due to OPA197’s rise time: at high loads the slew rate becomes a significant factor.
The revised design will need to employ a correction formula or table for input current & power as well as output power.
-
Auxillary Power Supplies
10/14/2018 at 20:43 • 0 commentsThe hacks made to the prototype allowed it to function for testing but the fans limited the input voltage range to less than 14 volts. I wanted a simple & efficient method for regulating the inverter's auxiliary supply. The sine section would need this too.
Since the redesign settled on the inverter operating as a DC transformer the option of a control loop was out. The discrete LDO I used in the start circuit wasn't suitable for delivering 300+mA so I began to look for off-the-shelf solutions. I looked at linear LDOs but their dissipation was too high. Their temperature derating was also a problem. I considered building my own buck/boost - more time consuming than I wanted. I eventually settled on a 6W isolated monolithic switching supply from Mean Well. It has current limiting, short circuit protection, decent transient response, acceptable noise margin, and provides a stable 12V from 9 to 18 volts.
I purchased one for evaluation and characterized it with an electronic load. It performed to spec well with only one anomaly. When running under greater than half load and applying a short, the unit would not restart with the short removed. I wound up contacting the OEM and confirmed it was working as designed. I was a bit surprised to hear that since when testing my own designs I consider that a conditional stability problem. But, this unit was nearly half the cost of the competitor's unit and I didn't anticipate loads or transient conditions that would make this a problem even when considering temperature derating (incidentally, I did test the other unit and it didn't have the problem).
I decided to use the Mean Well and added to the prototype.
![]()
![]()
Without fans to power, the sine section would have very modest power requirements (100mA max). A switching regulator would be a waste in both cost & space. A linear LDO regulator like the MC7812 is cheap, small, and wouldn't dissipate more than 1W. To provide isolation the redesign will use an auxiliary transformer winding with one additional turn than the primary. This ensures that even at low input voltages the LDO will have several volts of margin to provide a stable 12V.
I didn't make this modification to the prototype since it is basically using this design; the only change is to an LDO that can handle higher input voltages.
-
Differential Input Filter
08/15/2018 at 02:54 • 0 commentsI didn’t include one in the original design but with the current setup I now have the ability to quantify the EMI footprint. Spoiler alert: I’ve concluded one isn’t needed. Here’s why.
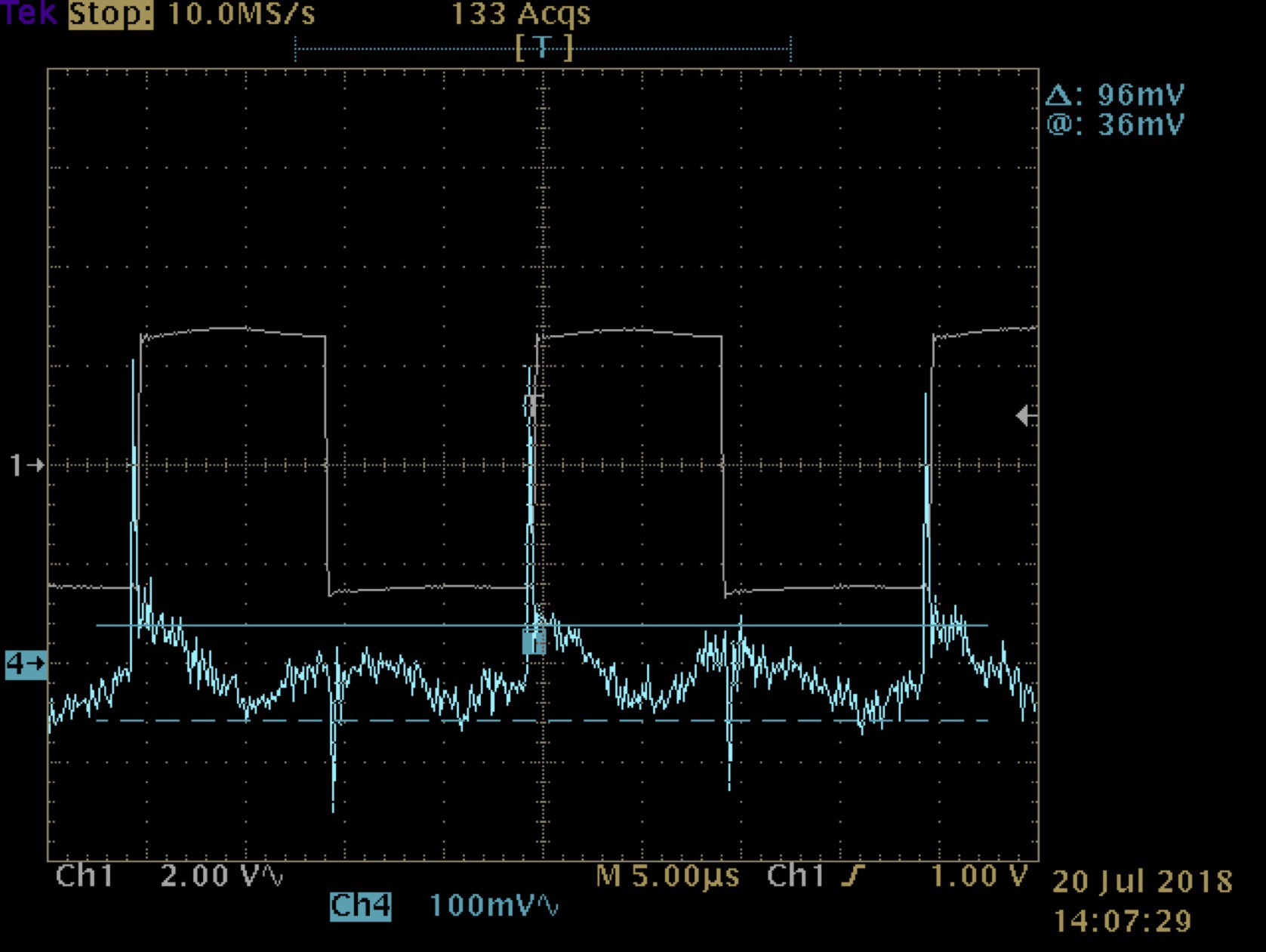
With a 350W load the voltage ripple across the power source (a battery) is ~ 100mV P-P. With a 400W output the current ripple is 3.56A P-P. Why the discrepancy in loads? These are the measurements I had on-hand and was too lazy to go back & redo. Besides, they favor a worst case. Here are the waveforms, voltage & current respectively.
![]()
![]()
The required inductance for the filter can be calculated with the formula: L=(Vr/Ir)TonToffT where Ton & Toff are time on & off in percent and T is the period in seconds. Substituting:
L = (0.1 / 3.56) x 0.95 x 0.05 x 1e-5
L = 13nHHardly worth it. Note that this is with power leads measuring about 2 ft (66cm) each. In a real-world application the power leads will likely be longer and even if they are paralleled or twisted will present a similar or larger inductance. It also assumes a low impedance power source which is a necessity for this thing to operate correctly. Using the above figures: R = V/I = 12 / 3.56 = 28mΩ. Assuming a 12V supply: 12 / 0.028 = 427A. That’s probably a bit high for a 9Ah battery but even at half of that its impedance is only 56mΩ.
While on the subject of input filters I’m not looking at common mode. This board has a lot of EMI coming from the sine section with much of it due to poor layout. Also the transformer doesn’t incorporate faraday screens so this will be left to evaluation in the revised build.
-
Getting Accurate Current Measurements
08/15/2018 at 02:15 • 0 commentsWith a functioning unit I can get on with using it to explore refinements for the next design iteration. But a lot of that work requires being able to measure, with reasonable accuracy, the input current. And therein lies the rub: this thing can easily draw 40A RMS with peaks exceeding 50A. I had mentioned in a previous post using the voltage drop across a measured segment of the positive supply lead but that is prone to noise and temperature error, particularly when using the scope.
Bench equipment to do this is prohibitively expensive. So are scope probes - most can't handle currents this high. I could replicate a version of the sense resistor & opamp circuit in the TS350 but that is exactly what I am trying to calibrate (for average power measurements).
Allegro hall effect current sensors to the rescue. I've used these before and they're great for applications requiring accuracy but without a high dv/dt and they are very rugged. I selected the 50A DC ACS770LCB-050U-PFF-T. For about $10 and some elbow grease I have an accurate input current sense that will render a reasonable picture of the current ripple. Response / rise times are on the order of ~ 6uS.
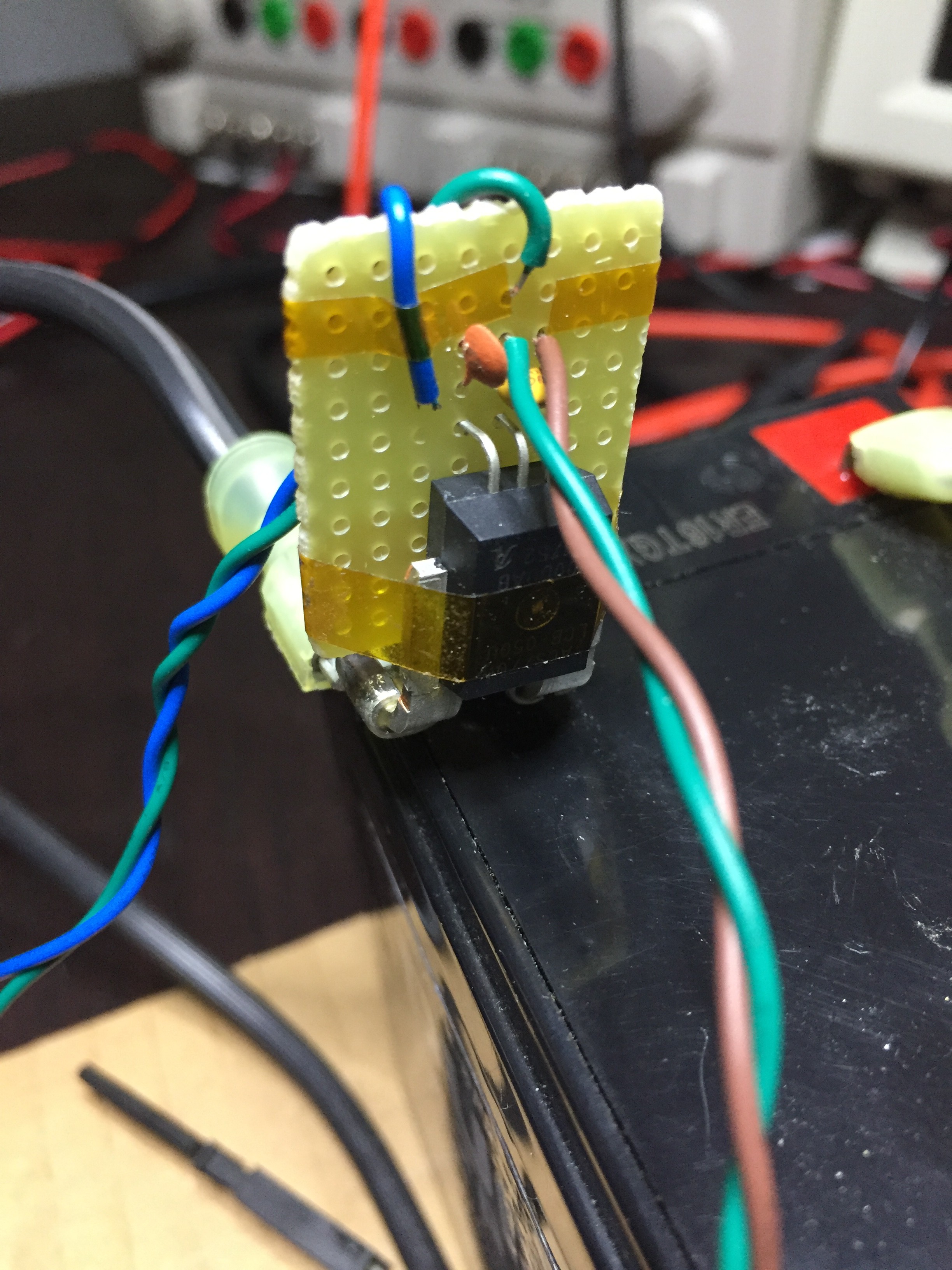
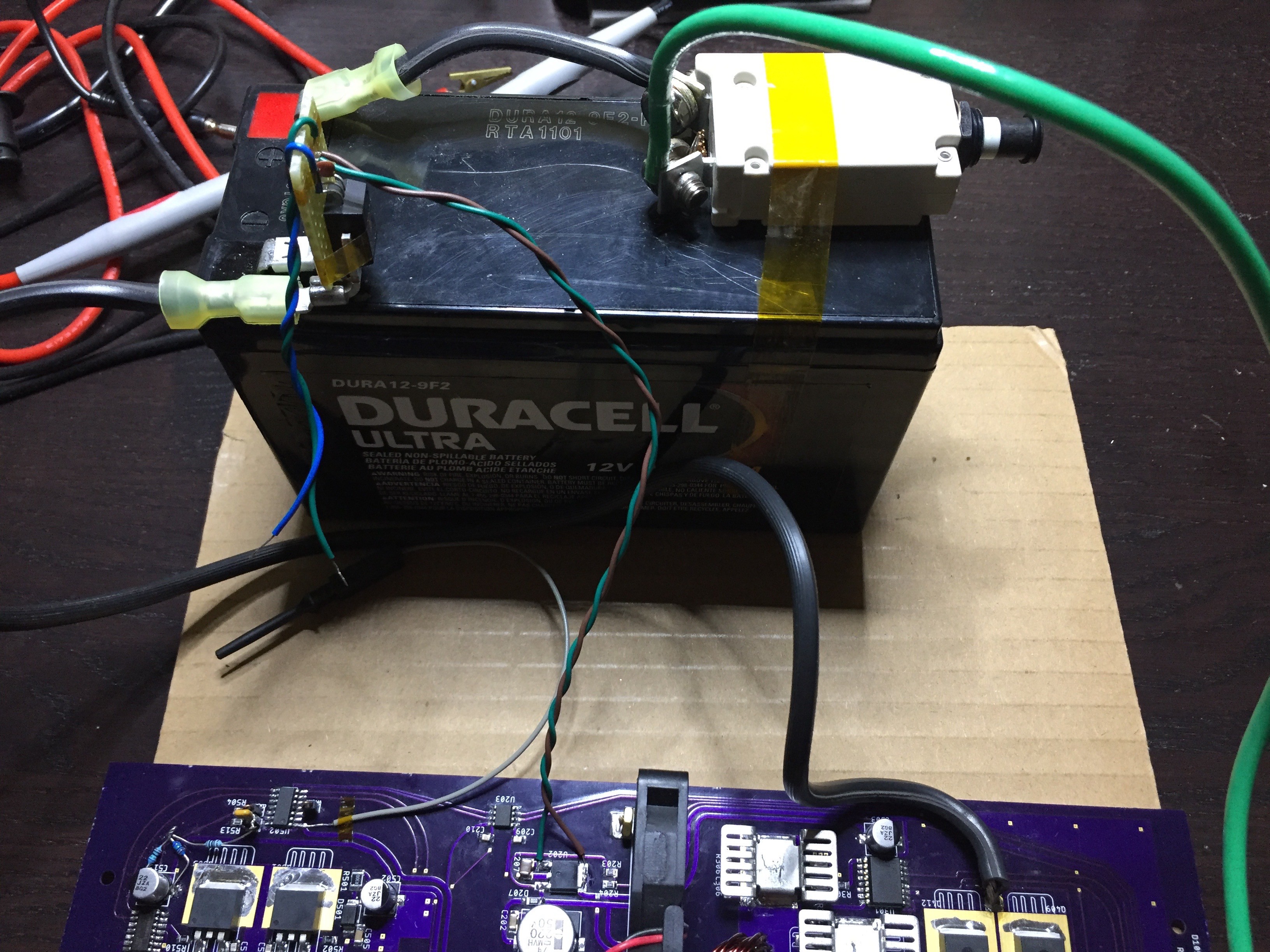
Here's a picture of the setup:
![]()
The sensor is fastened to perf board to facilitate power & output connections along with the decoupling and output filter caps. The current sense leads (PFF leadform) are connected to female clam connectors for direct connection to the battery negative and return lead from the inverter.
![]()
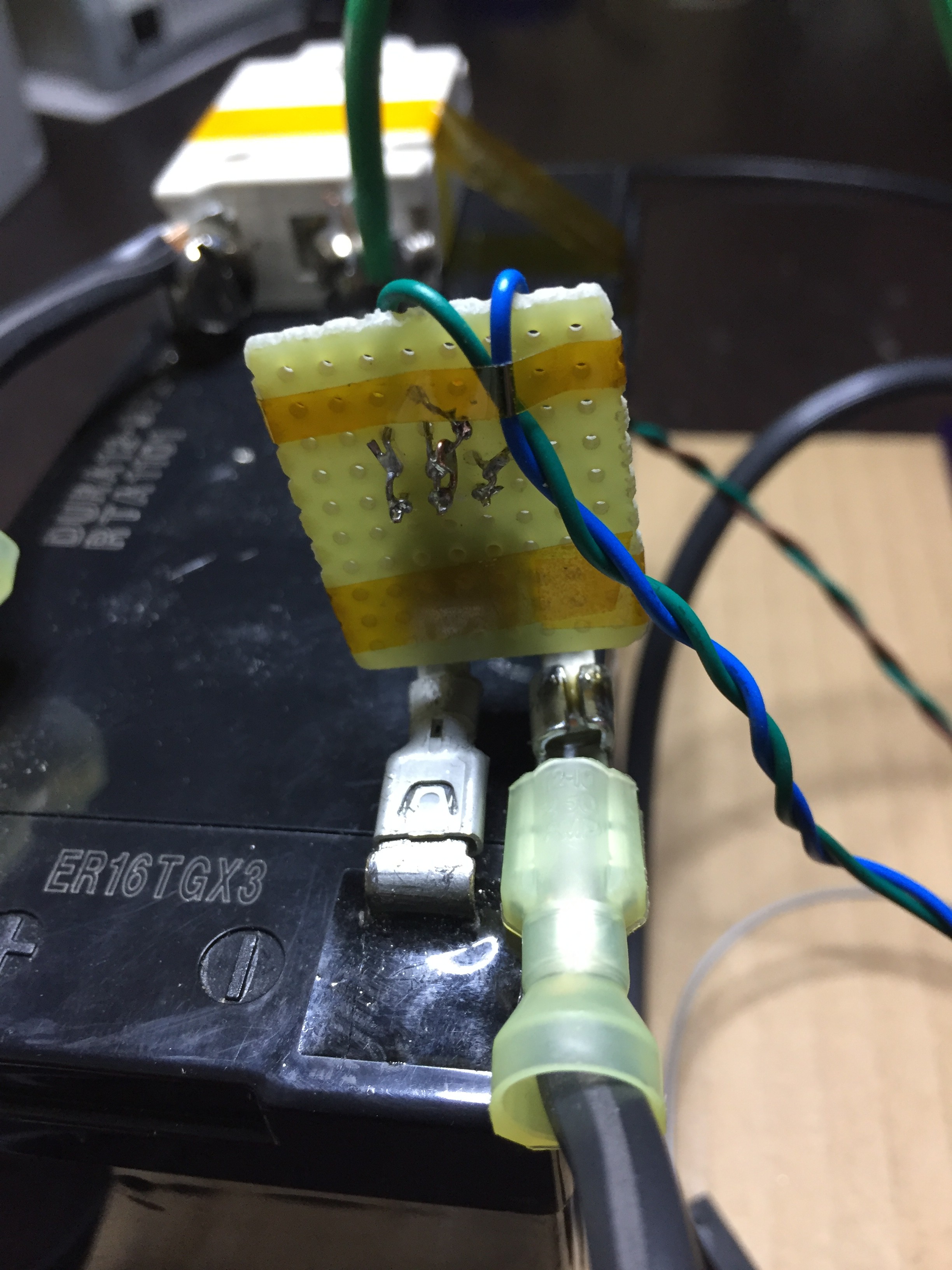
And here's the full setup:
![]()
The sensor requires a 5V supply and this is taken directly from the unit's 5V LDO (green/brown pair). Sensor output is the blue/green pair.
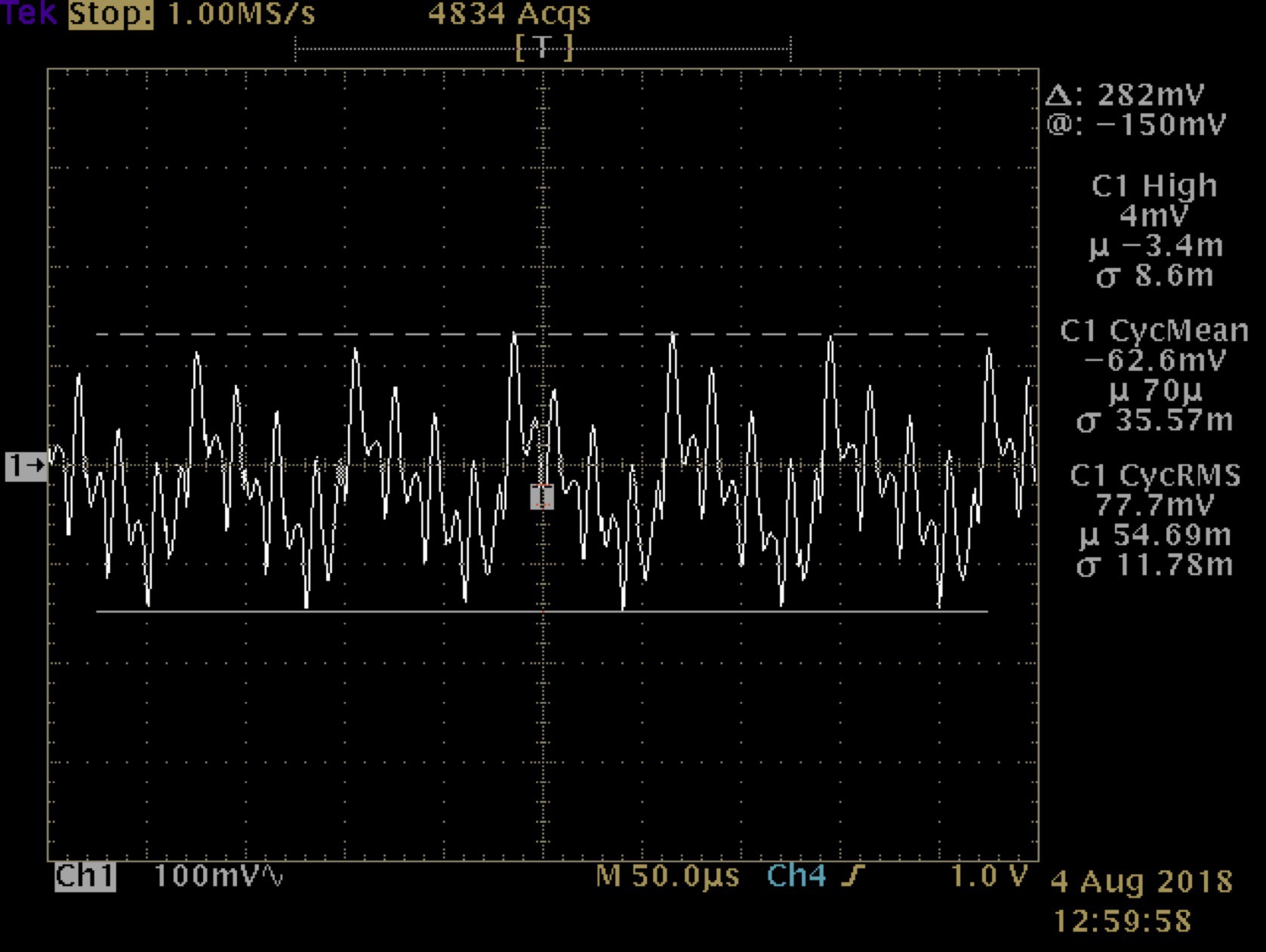
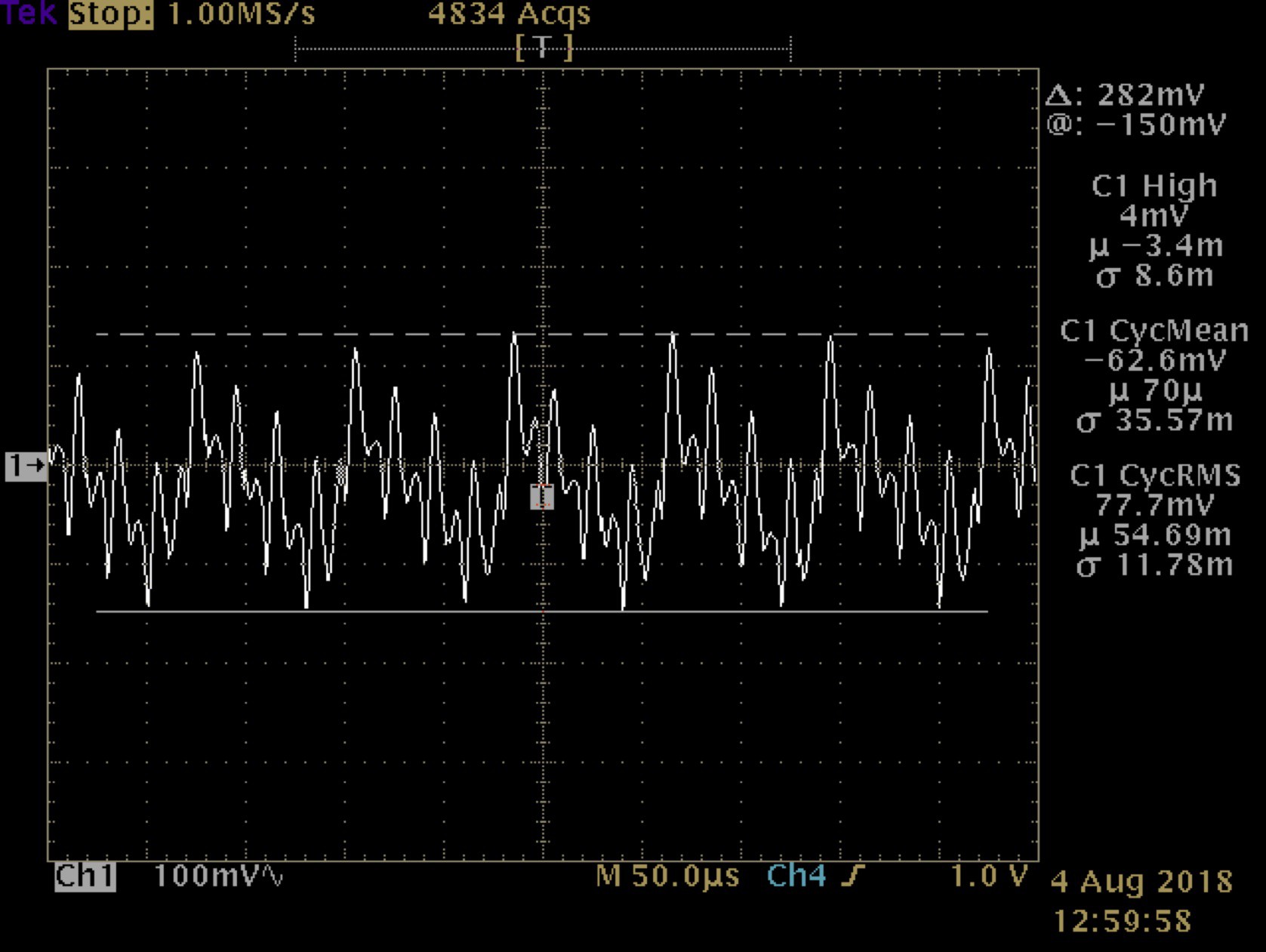
A nice side-benefit of these sensors is galvanic isolation; not critical for this application but does help keep the noise down. And noise is another great feature - the lack thereof. Below is a trace showing the current ripple AC component with a 400W DC load on the inverter's high voltage section.
![]()
The sensor's resolution is 80mV/A which gives a ripple component of about 1A RMS.
-
Stranger Things
07/16/2018 at 19:52 • 0 commentsMy efforts for salvaging the prototype are immediately rewarded. The DC transformer works great - no ring, clean outputs, decent regulation under load.
I resume testing of the sine section. Beyond some simple validations that it's working one of the first things I'll do is connect it to a 40W incandescent bulb. Not too big of a load but a decent inrush current. And I'll usually flip them on/off a few times to see how it handles the repetitive stress. After two cycles the sine bridge fails.
Testing shows a hi/low MOSFET pair is bad. I give them the benefit of a doubt and write it off to accumulated stress trying to operate with that hideous ring from the original transformer. Replace & retest; now the other side fails.
Hm, now I'm not so sure. I pull the data sheet for the IXYS IXFA30N25X3 MOSFETs.
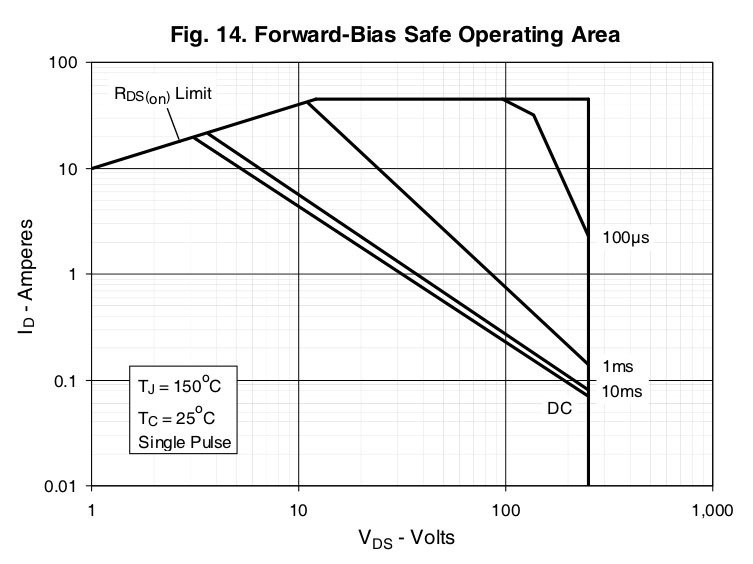
They are new on the market and I was a bit hesitant when I chose them but their gate charge & switching times were so impressive for what they cost. The Safe Operating Area (SOA) is one of the first things I look at when selecting transistors for power applications. I review it and that's when my heart sinks. Here's why.
![]()
The gradient lines don't render well here but 6A @ 200V intersects on the 100uS line. The time sections decrease by one decade as you move to the top right corner which is only 10uS. With the TS350's rated output the sine bridge switches will see much higher peak currents during turn-on. Don't know what I was smoking when I chose these but they are not right for the unit.
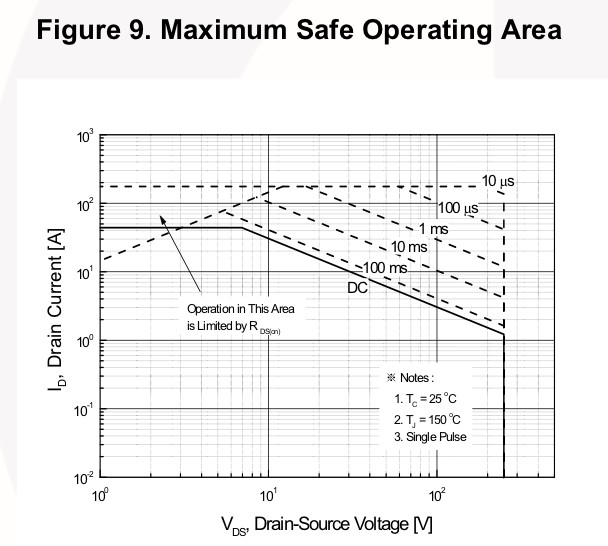
As a general rule, when comparing MOSFETs advertised voltage & current ratings, beware of those with lower gate charges and (typically) faster switching times. They will almost always have a more restrictive SOA. Here's the chart for the Fairchild FDB44N25 I replaced them with:
![]()
This puppy can handle 50A @ 200V for 100uS! But it's a dog speed wise with max switching times in excess of 100nS vs. 24nS for the IXYS. Same on Qg (gate charge): 61 vs. 21nC. This was all I had on hand and was surprised at how well they performed, especially since I didn't modify the bootstrap or gate drive.
I titled this 'Stranger Things' because I got to witness a MOSFET failure mode that I had not seen before. Prior to swapping all four IXYS MOSFETs I replaced the two that failed with Fairchild's. So one side is running IXYS & the other Fairchild; no mix & match with the gate drivers.
One of the primary tests I'll do on a sine bridge before applying high voltage for the first time is to run it from a bench supply with 10~20V applied to the bridge. First open and then with a resistive load of 1 ~ 2A. I did this with the repair and all was good. I then powered the inverter and proceeded with tests.
I began noticing distortion in one half of the sine - not surprisingly it was the IXYS side of the bridge. I spent hours on it chasing a ghost. Random gate drive & source voltages on the high side MOSFET would show no gate pulse or MOSFET turn-on. It was inconsistent and didn't seem to vary with load. For a while I thought it was the gate driver. Ultimately I replaced the transistors and the problem disappeared.
So the symptom was random gate shorting to the source but no short from the drain (which would have tripped over-current). The typical failure mode is a shorted D-S and sometimes D-S-G, and sometimes just open. But not random failures to switch at higher voltage stresses.
Okay, crisis averted, lessons learned, now I can move on.
-
Hacking the Prototype
07/16/2018 at 18:48 • 0 commentsThere was still a lot I could do with the unit if I hacked it to run as a DC transformer.
- Validate the high-side current sense
- Validate the current sample & hold circuit and develop formulas for input / output current & power
- Validate thermal model against real-world and test thermal management & shutdown
- Measure input ripple current to assist with differential mode input filter design
- Test sine section - both the gate drives & MOSFETs were new for me
- Measure sine performance @ 48kHz
- Test voltage regulation via adjustment of sine table values - critical if I am to pursue a DC transformer version
- Measure sine section EMI footprint and determine how to reduce / contain (I already knew it was bad in part because of a poor PCB layout)
- General refinement of the controller's code
First up was to replace the center-tapped transformer. I used the same core & material (TDK #B64290L0674X087, N87 ferrite). The high voltage secondary of 48 evenly spaced turns was wound against the core using 20AWG with one layer of 3mil polyimide tape. The three-turn primary was wound on top and used 10 strands of 20AWG. This is difficult to work with but like the secondary I try to cover as much of the core as possible. Another layer of 3mil polyimide over the primary and then a three-turn secondary (auxiliary) to power the sine section. This was wound with 24AWG. All magnet wire is MW35-C HY spec. The transformer's resonant frequency tested at 510kHz, with a calculated lumped parasitic capacitance of 4.9nF.
Note that unlike the original design there is no need to power the inverter section; it will draw its power directly from the DC input.
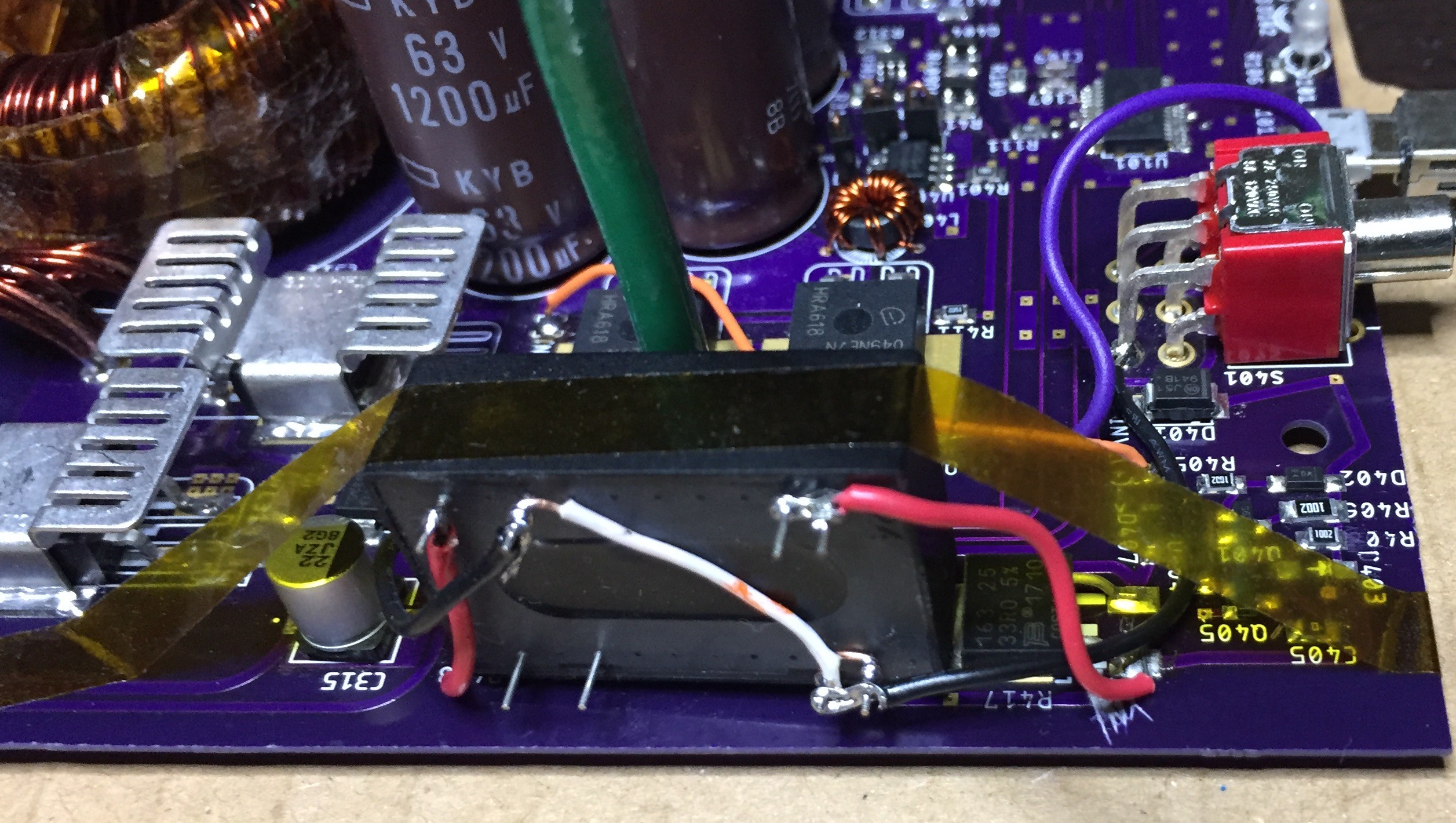
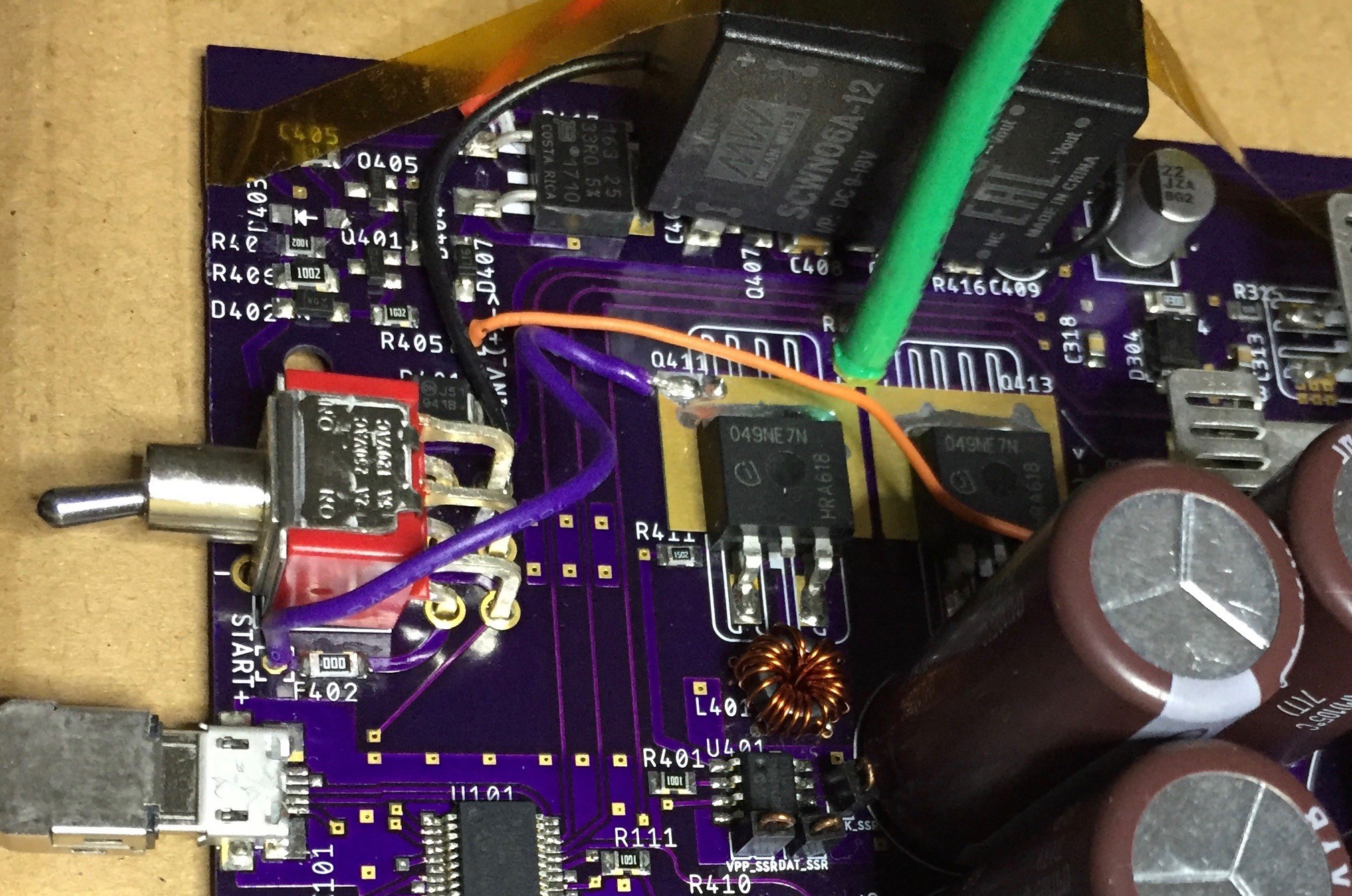
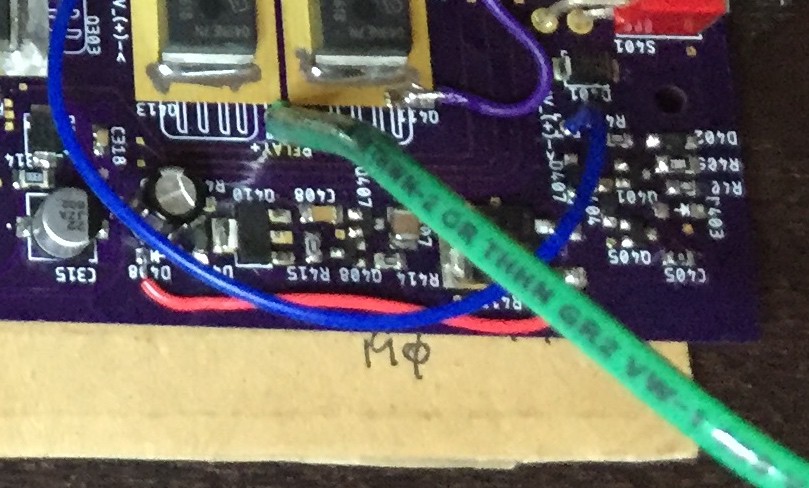
Next the start circuit & LDO had to be bypassed. C405 was replaced with a jumper so pass transistor Q403 remained on. R417, R418, and D407 were left in place for inrush control; these would now remain in circuit during operation but no current would flow due to D407's forward voltage drop. D408 was removed to disconnect the LDO and a jumper placed from the input pin of R417 to D408's cathode pad. With the switch in the ON position the inerter's auxiliary bus would be powered directly from the DC input. This limited the input voltage to < 14V (fans).
![]()
Last, the full-wave rectifiers for the high voltage & sine auxiliaries needed to be replaced with a full-bridge. Not a problem for the auxiliary since it's low voltage. I was able to hack them right on the board.
![]()
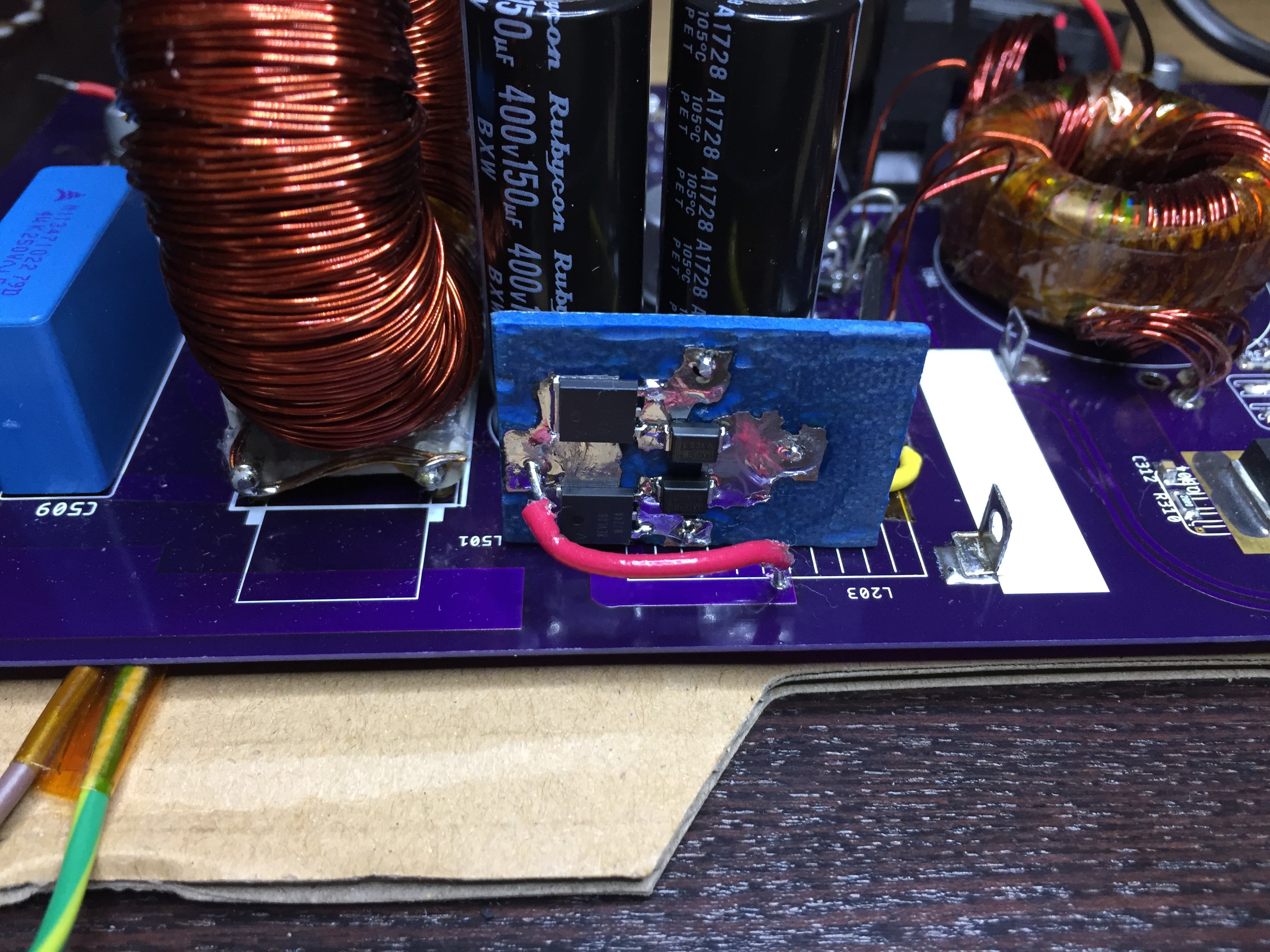
But I didn't have four of the same diodes for the high voltage side so wound up with a split of two each. I used the Dremel to etch a board to mount them on and spliced into the 350's PCB.
![]()
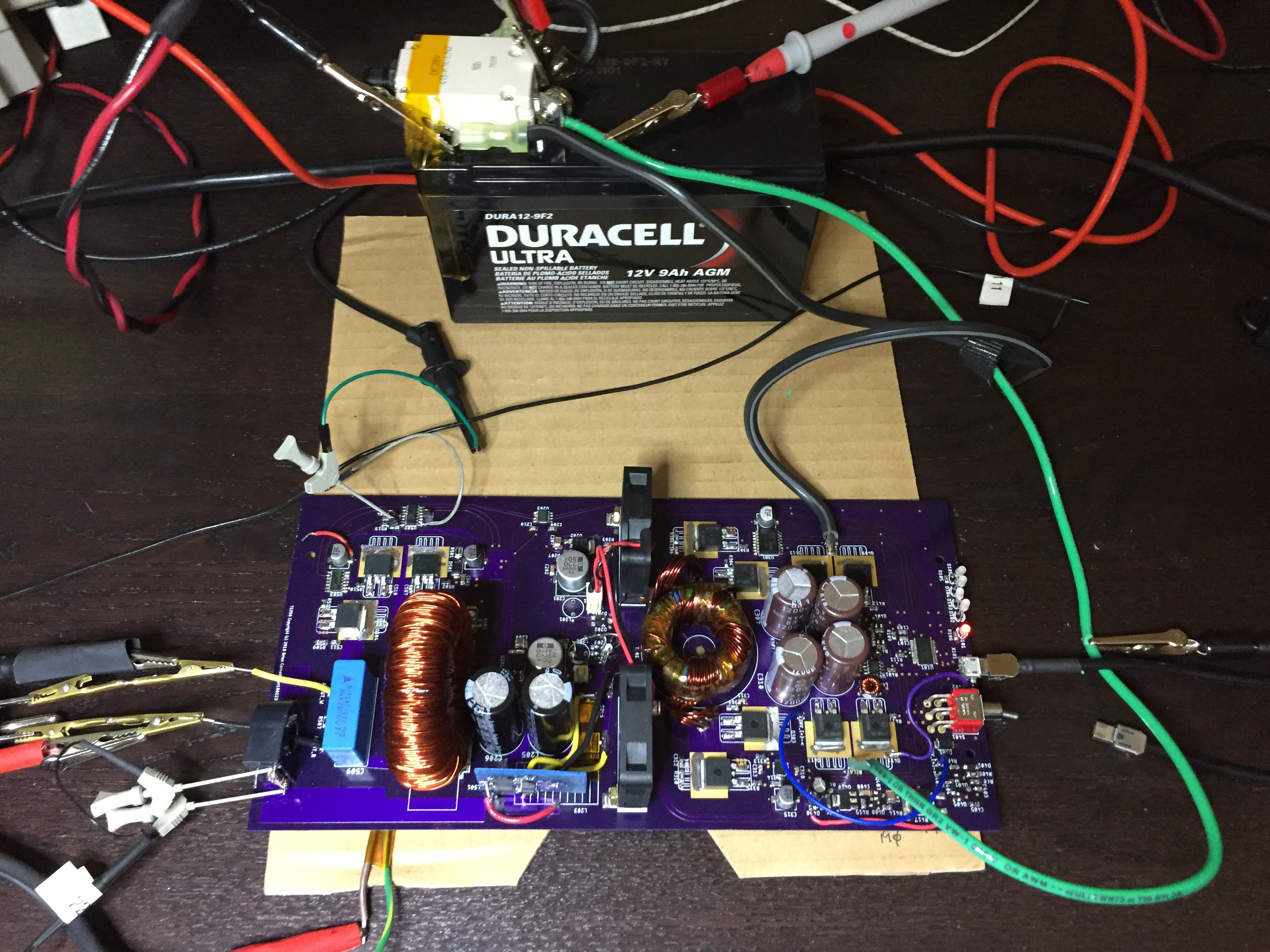
Here's a picture of the completed hack setup for testing. The black & yellow leads in the bottom left corner are the AC output. One set of clips leads to an AC true RMS watt meter and AC load, the other to a Tek P5200 high voltage differential probe. The black toroid with the grey clips is a current transformer. The brown & green leads at bottom left are from the high voltage DC bus and connect to an HP 6063B DC load.
![]()
The Duracell battery is 12V, 9Ah. I use it in conjunction with my bench supply which maxes out at 10A. I'll have the bench supply connected to the battery to extend the run-time and to recharge between testing cycles. The inverter will easily draw 30A+ when running close to rated output so cycles are limited to ~ 15 minutes. It's not ideal and takes more time to get things done but you have to get creative without an unlimited budget to buy gear.
On that theme, the red & black alligator clips on the green DC+ lead are used to measure current. My bench meter is limited to 10A. I removed the insulation in two spots about 1 foot apart which gives me ~ 1mV/A for 10AWG.
AC loads: those are hard to find even if you do have the money and they are very expensive. I use an autotransformer connected to a 1300W resistive space heater. I usually put my watt meter in line with it too. The autotransformer allows you to set the load. Transient testing? Sure, flip the load switch.
All of this works great to baseline the unit and make sure it is safe.
-
Theory of Operation
07/10/2018 at 19:14 • 0 commentsThis is for the original design and provides an overview.
The TS350 was designed as a portable true sine inverter providing 350W @ 120VAC continuous in ambient environments of -20 to +50C. In boost mode it will source 500W until internal thermal limits are reached. It is intended to operate from input voltages of 11 to 30 VDC; this was done to accommodate 12 & 24V PV systems.
The TS350 consists of five major sections:
- Fuse, start & relay
- Controller
- Inverter
- High voltage and auxiliary power supplies
- Sine
Fuse, start and relay. This section is responsible for protecting from uncontrolled over-current events, providing startup bias to the controller & inverter sections, and provides over-voltage & reverse polarity protection.
F401 is a resettable thermal fuse that opens when the sustained current exceeds 60A. All power to the unit flows thru it. The start circuit is energized via F402 & S401. D401 is a zener crowbar that will open F402 if the input voltage exceeds its rated voltage. This provides a band above 30V where the unit is simply disabled. Q401, Q405, and associated components perform this function.
Q403 is a pass transistor with an on-time controlled by R408 & C405. On-time varies based on input voltage but is typically 1.5-2.5S. This ensures that if the unit doesn't start it is completely de-energized. Turning S401 off discharges the RC circuit (via body diode of Q405).
The output of Q403 powers the inrush limiting and LDO circuits. R417, R418, and D407 provide current limited power to charge the inverter bridge bulk capacitors. The resistance is high enough to prevent nuisance opening of F402 but low enough that should a sustained high-current situation (e.g. downstream short) occur it will open. The LDO delivers sufficient current, limited to 13V, to the inverter Vcc bus.
The relay provides input reverse polarity protection and eliminates the need for a bulky high-current front panel switch. It consists of two paralleled MOSFETs for each pole: Q409, Q412, Q411, Q413. Because the negative pole is ground referenced its MOSFETs are driven directly by Q404. The positive pole requires a floating gate drive and employs a fixed PWM, isolated flyback, circuit. This is comprised of Q402, L401, and supporting components. U401 is the dedicated controller for on/off control, acknowledgement PWM drive, and temperature monitoring. Jumpers are provided to permit firmware updates.
Controller. The controller is responsible for running the inverter and managing all aspects of the unit's operation. It is too complex to describe here so only highlights are given.
Upon boot, the controller manages the start sequence:
- Parameter checks
- Relay on
- Bootstrap charge
- Inverter on
- Sine on
The entire sequence happens in a few hundred milliseconds. Diagnostics occur at each and a failure will shut the unit down.
The controller's internal peripherals are used to drive the inverter bridge. This includes timing, gate drive signals, current sensing and voltage feedback control loop. A conventional voltage feedback control loop is constructed with internal peripherals (ramp, comparator, opamp, etc.) along with an external type 3 RC filter.
This loop is closed on the inverter's Vcc supply from the transformer. Hence, the accuracy of the sine's RMS AC output is dependent on the transformer's regulation and coupling between windings.
A current sense signal drives an internal comparator to perform pulse-pulse current limiting. The current sense signal also drives a sample & hold circuit configured with an internal opamp & external capacitor C102. The voltage at C102 is then periodically sampled by the controller's ADC to derive RMS current & power. This is used to drive front panel LEDs D102-D105 and to perform over current/power management.Both the voltage & current sense loops operate autonomously without controller intervention.
Like the start sequence, during normal operation a variety of parameters are monitored and will trigger a shutdown. These include a high temperature in the inverter or excessive current / power for too long. Loss of the acknowledgement signals from the sine & relay controllers will also trigger a shutdown; these most likely occur from a high temperature in their respective sections.
The controller includes a simple RS232-based management console that's accessible from the service port. It operates at 115.2kbps, 8 data bits, 1 stop, no parity, and uses TTL level signals. It can be used to monitor operation, change parameters and configure certain modes of operation. Key values are stored in NVM.
Inverter. The inverter is a conventional full bridge and utilizes monolithic gate drive chips for each half. High side gates are driven via bootstrap. RC snubbers are placed across each MOSFET to reduce switching stress. C307-C310 provide a large amount of bulk capacitance to reduce input ripple current & EMI. R307 & R308 form a shunt for U302 to sense current. R311 & R316 set a gain of 10 for 15mV/A and, Q305 level shifts the output. Since U302 is operating at the DC+ input rail, D302 & D303 protect against inductive voltage spikes.
High voltage and auxiliary power supplies. The transformer contains three center-tapped secondaries: sine high voltage (HV), inverter auxiliary, and sine auxillary. All three utilize a conventional full-wave rectifier and output LC filter. Both auxiliary supplies contain a 5V LDO for logic circuits. For balanced loading each of the auxiliary supplies power one of the fans. D207 prevents the start circuit from driving the fan. Q202 & R205 form a preload circuit for the HV supply to prevent it from drifting to the transformer's output voltage before the sine section is turned on. U203 is a digital isolator that facilitates communication between the sine & master controllers.
Sine. It too uses a conventional full bridge and monolithic gate drive chips. High side gates are driven via bootstrap. RC snubbers are placed across each MOSFET to reduce switching stress. L501 & C509 form the output LC filter. MOV501-503 are varistors to protect the bridge from inductive spikes originating in appliances. Over-current protection is not included; the bridge relies first on L501 (current cannot change instantaneously in an inductor) and second on the inverter. U502 is the dedicated controller for on/off control, acknowledgement, sine DDS, gate drive, and temperature monitoring. Jumpers are provided to permit firmware updates.
-
Original design files posted
07/10/2018 at 16:50 • 0 commentsThese are for the original design and include source code & PCB. Helpful if you're following along or a starting point for your own derivative.
Will post revisions when available.
TS350 True Sine Inverter
350 Watt inverter that converts 12VDC to 120VAC @ 60Hz.