 Daniel James Evans
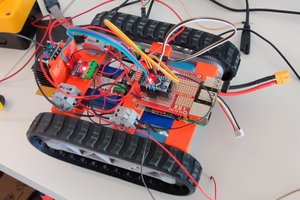
Daniel James EvansActuators: The robot uses DC motors with built-in worm gears. Each motor uses a rotary potentiometer to get feedback. The motors are rated as 6V, 6RPM.
Printed Parts: The blue plastic parts were designed in FreeCAD and 3D printed.
Misc. Electronics: The motors are driven by L298N h-bridges. The h-bridges are connected to an Adafruit Servo Bonnet, which is connected to a Raspberry Pi Zero W. An ADC (MCP3008) is used to get readings from the potentiometers.
Software: I couldn't find software to control this robot, so I wrote my own using Python. The software can only draw straight lines. It breaks the line into segments; the robot adjusts its motor speeds after drawing each segment. To draw each segment, it uses the following steps:
- Use the potentiometers (and the ADC) to get the robot's current position. Communication with the ADC uses bit-banged SPI (because I couldn't figure out how to use the hardware SPI without my code having GPL infection).
- Calculate the potentiometer readings at the desired position.
- Calculate the PWM duty cycles for each motor, so that each motor reaches the desired position at the same time.
- As the motors move, repeatedly get potentiometer readings. When a motor has reached the desired position, stop its movement.
- Once all motors have stopped, proceed to the next line segment.
I wrote a gcode parser, but since the resolution is so poor I decided not to spend the time integrating the parser into the rest of my code.
Problems: The resolution is surprisingly poor. I think this is because of looseness in the worm gears. I can freely rotate the motor shaft several degrees before engaging the gears. There is also room for improvement in the software, but I think this is less of an issue than the loose motor shafts.
A Note About Pi CNCs: It is often argued that it is impossible to build a Pi CNC without writing a real-time operating system. This is usually because of concern that the Pi can't provide high-precision pulses for stepper motors. (There is some evidence that the Pi is probably fine for hobby-level stepper CNCs, but that's beside the point).
I attempted to circumvent these difficulties by replacing steppers with DC motors, and controlling them using a PWM Bonnet. The Pi must regularly check the potentiometer readings, but this is probably less demanding than sending stepper pulses.
While I was not successful enough to conclusively show that a Pi can control a closed-loop CNC, I still believe that the circuitry would work if the motors and software are of sufficient quality.

 Pengu MC
Pengu MC
 roboteurs
roboteurs
 Nancy Yi Liang
Nancy Yi Liang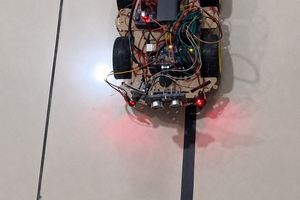
 Himanshu Dada
Himanshu Dada
HI