0%
0%
STAR, an Arduino Robot Recreation
This Arduino based robot was recreated from a 2013 UC Berkeley paper and can crawl under some doors.
 Ali
AliBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Bryan Herrera
Bryan Herrera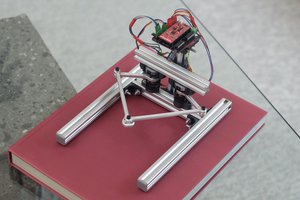
 David Gonzalez
David Gonzalez
 Robotics Everyday
Robotics Everyday
 Boian Mitov
Boian Mitov
Cute video, somehow this little vehicle makes me grin all the time.