Objectives:
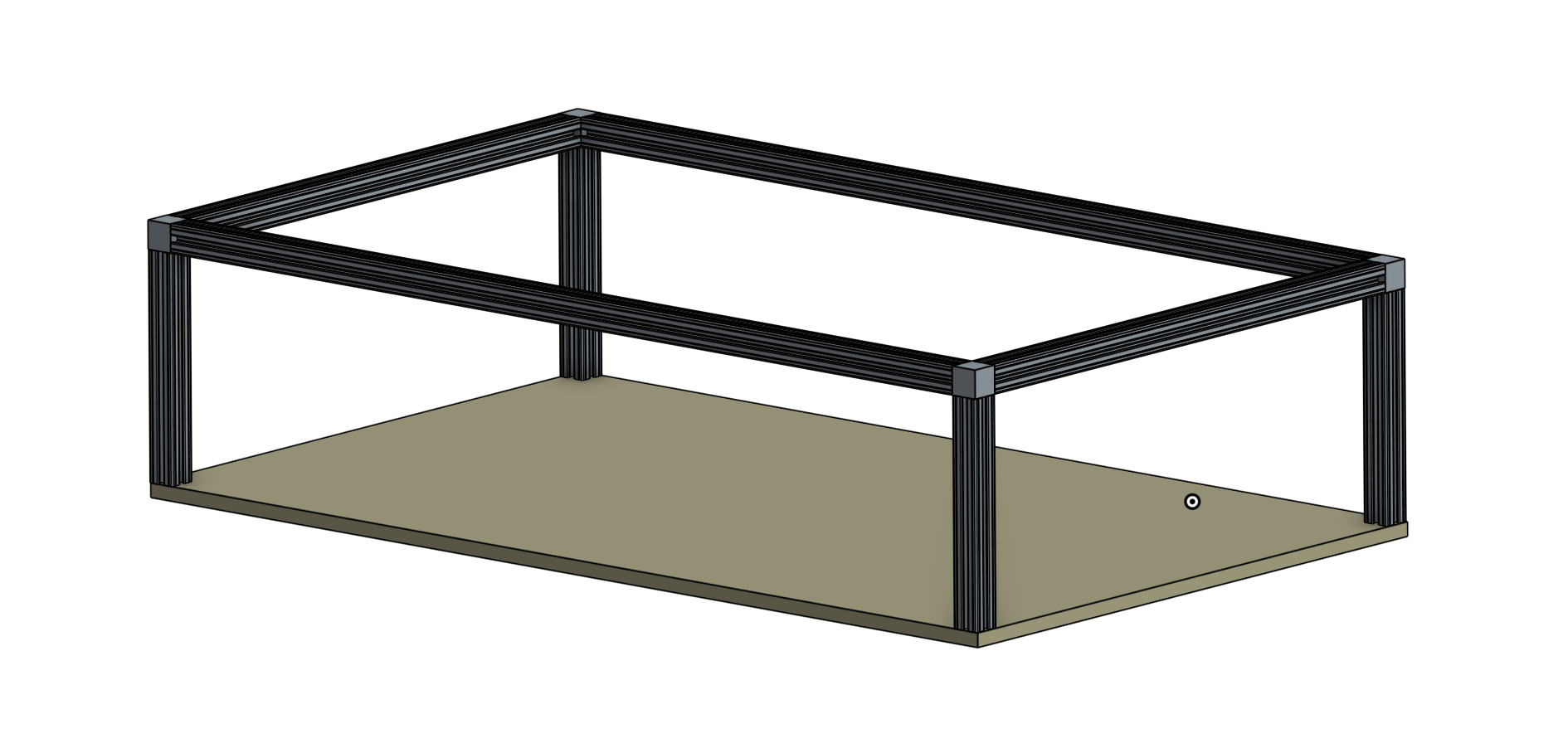
Frame Construction & Chassis
- Weight & Strength
- Maximum top speed (Goal: 15 mph)
- Comfort of riding & Braking System
- Wheel traction & Motors
- Chassis Reinforcement
Additional Car Electronics/Necessities
- Ultrasonic sensors on all sides
- Speaker to communicate danger
- Accelerating system
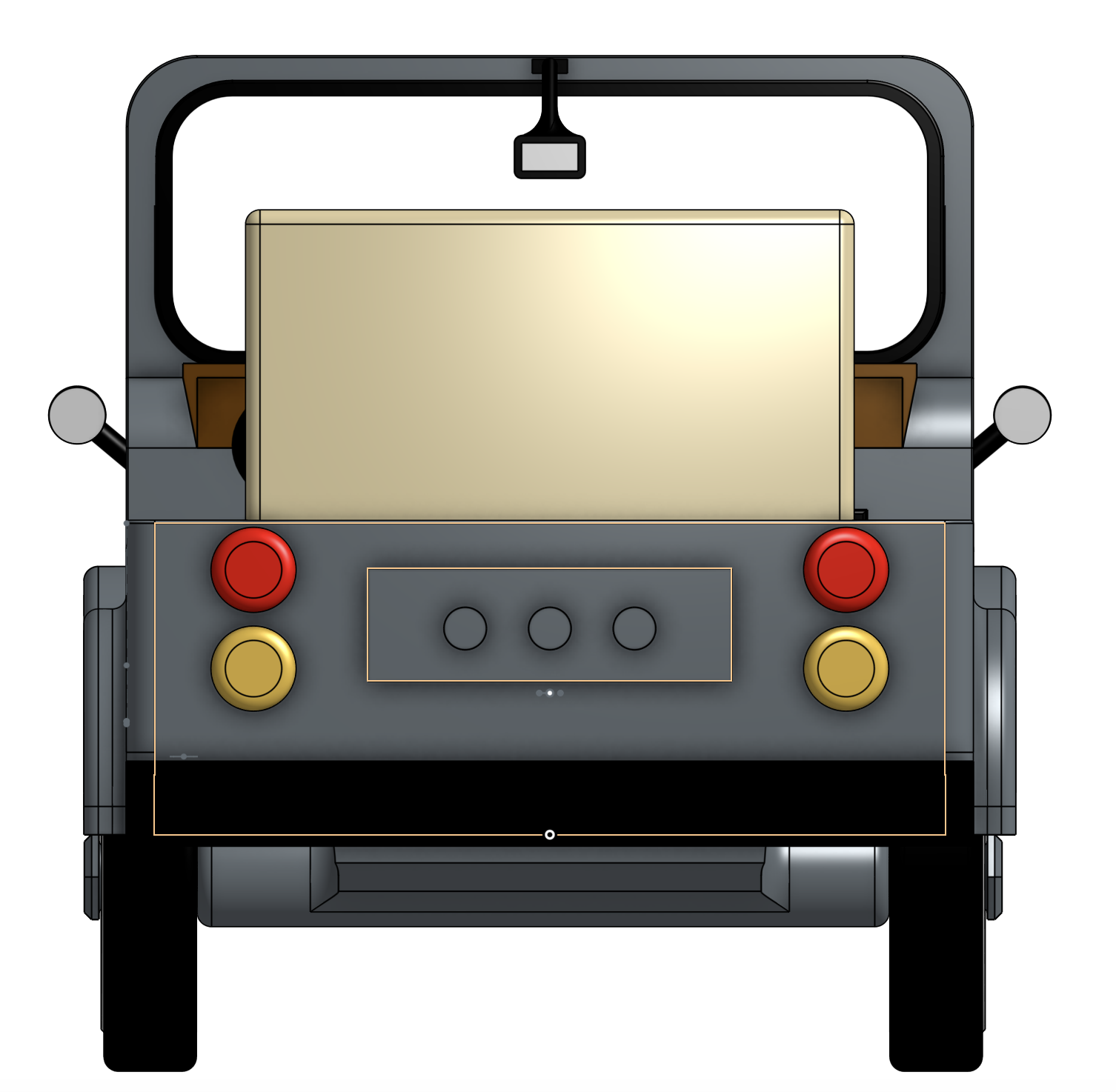
- Indicators
Autonomous Driving
- Avoid obstacles using ultrasonic sensors
- GPS tracking to navigate to a certain point
- Additional possibilities if time permits:
- Remote control
- Speaker guided commands






 Simon Merrett
Simon Merrett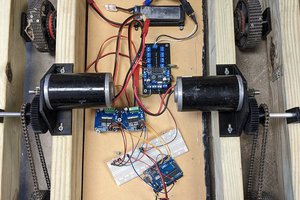
 David
David
 Mario Ninic
Mario Ninic
 ken.do
ken.do
Although our project was aimed at modifying a power wheels vehicle to create an autonomous vehicle, we found that many of the same practices we used along with difficulties we faced are present for those designing full sized autonomous vehicles today. Whether it be something as simple as an ultrasonic sensor reading, or as complex as detecting street lights using machine learning, the challenges that creators of autonomous vehicles face everyday are difficult. However, innovations in this industry could drastically impact the future of the automobiles.
A future of autonomous vehicles could help solve the problems of traffic and accidents we see everyday. Even the most focused drivers make mistakes, and innocent lives are lost every day due to minor human errors. Autonomous vehicles can help solve the issues of distraction and error while providing numerous other benefits such as decreasing the rate at which pollution is being added to our environment. Although two deadly crashes in early 2018 did scare some into believing that autonomous driving testing is dangerous, it is essential and necessary to test because of the countless improvements that a road full of autonomous vehicles could lead to.
Although we faced several difficulties both throughout the construction of our vehicle and in terms of part arrival, there were many positives that resulted from our research. We were able to construct an easy to install back-up sensor, wire an IMU to read the angle of the steering wheel, and optimize our vehicle to accommodate for larger people and heavier material. We hope that future Automation and Robotics senior researchers can use our project as a model to learn what techniques to modifying a vehicle are effective and what common mistakes can be avoided using different routes. As we graduate, we hope to advance our techniques and ability from Power Wheels cars and go-karts to real cars in the future, and we hope that we can use experiences from this project to guide the construction of fully autonomous vehicles.